皆さんこんにちは、19のみたらし団子です(今考えた仮の名前なのでハンドルネーム大募集中です)。
さて、20の皆さんご入学おめでとうございます。
とは言っても入学式が中止になったようなのでまだ実感はないと思います。なんか大変やね…(笑)
ところで、今日のテーマは「ロボット制御シミュレーションしてみた!!」となっております。
ロ技研では毎年様々な新歓イベントを行っていますが今年はコロナが…なので、オンラインで皆さんにロ技研の魅力を知っていただこう!ということでこういうことを試みています。
そこで、ほぼ新入生と言っても過言ではない私も新入生と一緒に参加してみた!というわけです。urlを貼っておきますのでぜひ皆さんも参加してみてください
https://www.rogiken.org/shinkan/2020/introduce.html
ではやっていきましょう!
優秀な先輩部員が作った懇切懇切丁寧なwikiがあるのでこれに従って進めていくことにします。
トップページからzipファイルをダウンロードしてきました,私のpcには既にmatlabが入っているので早速動かしていきます
どうやらコントロール用、ロボット機体用のマトラボプログラムを弄ってシミュレーションをするようですね..まずは速度をいじってみます!
二つの数字が左右の車輪のモーターに与える電圧に対応しているみたいです、とりあえずまっすぐ進んでほしいので左右の値を共に2.5としました。
右側の丸い所に乗ればゴールなのですが、、、、
はいゴールしました。本当にお疲れ様でした。ロ技研来てね!さよなら~~

……とまあうまくいくのは稀です。
だいたいこのように壁にぶつかってしまいます。というのはこのロボット、キチンとまっすぐには進まないようになっているんですね。
それをどうにかしてゴールさせてやろうというのが制御のお仕事なわけです。今はやりのテレワークというやつですね、知らんけど。
理論上は左右の速度が一緒ならまっすぐ進むのですが、このロボットのようにうまくいかないということは,実際のロボットでも起こります、車輪にかかる摩擦力が左右で異なったりするからですね。多分そうだと思う。
ラジコンのように操作しているならば多少曲がっても問題ありませんが、今回のように自動で動くロボットではドンドンズレが大きくなってしまいますからこれは良くないでしょう。
プログラムを書いて制御するためにも,とりあえずどのくらいロボットが基準線からずれているかを何らかの方法で取得したいですね。
ということで、センサーを導入してロボットの位置を取得してみたいと思います。
導入したものがこちらになります。
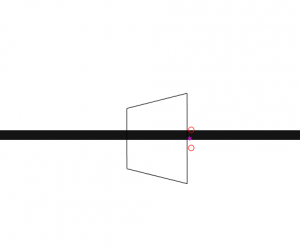
上の画像の小さい赤丸がそうですね。こいつは光センサーを模したもので、黒い線上だと小さい値、白いフィールド上だと大きい値を返してきます。これを使ってなんとかまっすぐ進ませたい‼!
ということで、二つの光センサーを取り付けて、大きい値が帰ってきたら,つまり左右にズレが発生したら、左右の速度を変えてライン上に復帰するようにしてみました。
うまくいきました。本当にお疲れ様でした。ロ技研来てね!!さよなら~
….はい、うまくいったはいいけどなんかすっごいカクカクしてる。これは嫌ですね、嫌じゃないですか?
これどうやったら直るかなって一晩中考えたんですが(大嘘)、線からの離れ具合によって左右の速度をうまく変化させればよいのではないでしょうか。ちょっとしかずれていないのに猛スピードで戻そうとしたらそらいかんでしょ。ということでやって見ます。
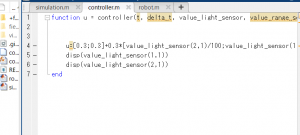
☝0.3に左右のセンサーからの値を掛けています、センサーからの値が小さければ車輪の速度もあまり変わりません。
さてさてどうかな…?
だいぶ良くなりましたね。良くなりました。制御の知識皆無の僕の見解によるとこれがいわゆるP制御というやつです。無知をさらしたくないのでこれ以上は触れません。みんな、勉強…しよう!
ここまででもはや私はロボットを自由自在に動かせるようになりました。
そこで次回はライントレース課題にチャレンジしたいと思います。
では今度こそさようなら~
ロボット制御体験は以下のリンクから!
