こんにちは、15の野元です。
今年もロボット技術研究会派MakerFaireTokyoに出展が決まりました!
MFTとは?
MFT(MakerFaireTokyo)とは年に一度東京ビッグサイトで開催されるものつくりの展示会です。今年は8/4(土),8/5(日)に開催されます。
ロ技研の作品たち
今年展示する作品たちを紹介した記事がこちらです。
東京工業大学の公認サークル「ロボット技術研究会」のブログです。 当サークルの日々の活動の様子を皆さんにお伝えしていきます。たくさんの人に気軽に読んでもらえると嬉しいです。
こんにちは、15の野元です。
今年もロボット技術研究会派MakerFaireTokyoに出展が決まりました!
MFT(MakerFaireTokyo)とは年に一度東京ビッグサイトで開催されるものつくりの展示会です。今年は8/4(土),8/5(日)に開催されます。
今年展示する作品たちを紹介した記事がこちらです。
ごきげんよう,14のmine( @minerallector )です.
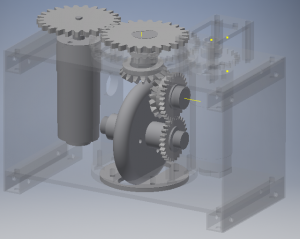
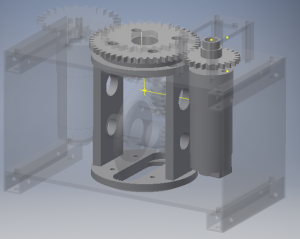
Maker Faire Tokyo 2018にて,最近作ったステアユニットを展示します.

(8/5追記)
ステアユニットは、回転する車輪ごとその向きを変えることで、ロボットを任意の方向へ進めるようにするためのコンポーネントです.
本作品ではディファレンシャルギヤと呼ばれる機構から派生して、2入力2出力のユニットを構成しています.
Q.これは何の役に立つんですか?
A.車輪と操舵部の動きが干渉する機構なので,制御屋さんが†楽しめ†ます.
Q.どうして3Dプリンタ製なんですか?
A.『加工したくないという強い思いから』です.
Q.どんな風に動かすの?
A.今から実装します!
それでは,当日お会いしましょう.
MFTたのしみ~
おはようございます こんにちは こんばんは. 16のだんごです.
Maker Faire Tokyo 2018でこんな感じのロボットを展示します.
MFT2018でこんな感じのロボットを展示します. パネルの上のボールをサーボモーターで制御して色々動かします. よろしくお願いします. pic.twitter.com/jOQAX1x8EA
— dangorogoro (@dango_bot) 2018年7月29日
これはタッチパネル上のボールの位置を読み取ってサーボモーターを使って自由にボールを動かしたいなぁってロボットです.
最近, エスペラント語が出てくるゲームをやっていたので, エスペラント語でボールという意味のPilkoって名前をつけました.
作り始めたのが2週間ぐらい前からなので, まだ完成してないですが, 当日には動くんじゃないかな?って思います. (ホンマかー?)
それでは会場でお会いしましょう.
こんにちは、16のkura(@mochi_pako)です。
FPGAを使って、自作CPU上で簡易的なOS(xv6)を動かすことができたので、Maker Faire Tokyo 2018で展示します。

FPGA上にオリジナルのRISCV CPUを実装し、起動時にSDカードからOSイメージを読み出すことで動かしています。
UART通信による入出力の他に、PS/2キーボードによる入力や、ディスプレイ出力をできるようにしました。
また、とても小さなテキストエディタとアセンブラを使えるようにしているため、FPGA上での開発も一応できるようにはなっています。(全く実用的では無いですが…)
なかなか地味な作品ではありますが、是非見に来てください!!
こんにちは!ビスマス(@kbkbirogy)です。
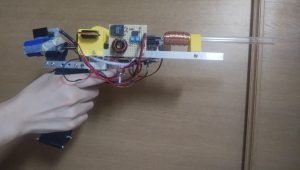
MFTでは、ソレノイドを使った回転物を展示する予定です。
カチカチ音を鳴らしながら、グルグルしちゃいます。
メカメカしてる動きをお楽しみください。
アクリル化によって、動作が安定するようになった。一回転、0.175sくらいでいける! pic.twitter.com/iNq0kc1E2N
— びすます (@kbkbirogy) July 21, 2018
Maker Faire Tokyo 2018 で展示予定なので、ぜひ見に来てください~
ちょっと天啓を得たので、更に”へんしん”させちゃうかもです。アップデートも含めてお楽しみに~
こんばんは. 16のゆきです.
4月の末くらいから始めた『確率ロボティクス』の講読会の, 前期分が終了しました.
2月くらいに適当にツイートしたら, ノリで始まってしまったわけですが, 学部・修士・博士学生が集まり, 仙台高専からの遠隔参加もあったりしながら進めています.
こんにちはphi16です。また変なもの作りました。
MFT2018(8/4,5)で携帯を展示します よろしくおねがいします pic.twitter.com/ghq8wXPgme
— phi16 (@phi16_) 2018年7月26日
ぱっと見でもよく見ても意味がわからないとは思いますが。はい。
こちら、私が常用してるキーボードです。多分キーボードです。かっこいいのでRunicaっていう名前を付けました。

解説も含め、Maker Faire Tokyo 2018 で展示します。ロボットとかじゃないけど興味があれば是非見にきてください~
【アクア研】追浜ミーティングに行ってきました
5 月 20 日に日本水中ロボネット主催の水中ビークル・フリーミーティング(略称 : 追浜ミーティング)に行ってきたので, その報告です.
ブログの公開が遅くなって申し訳ありません.今回, 我々アクア研が行ってきた水中ビークル・フリーミーティングとは,
社会人や高校等の先生・学生が水中技術にチャレンジしようとしても、プールや水槽を借りることは容易ではなく、水中用パーツほか中高生向けの技術情報もあまりありません。このため、日本水中ロボネットが施設を借り、そこで学生や先生と一緒になって水中ロボット/ビークルを水中で動かしたり技術交流し、工作事例や水中用パーツなどを考案する、それが「水中ビークル・フリーミーティング」です。
減免措置いただいた施設使用料、万一の事故に備えた保険料、消耗品ほかの費用を日本水中ロボネットが負担することによって、学生、先生、見学者、支援ダイバーは無料で参加できます。http://underwaterrobonet.org/oppama/index.htm
というものです. ミーティングの開催場所はJAMSTEC横須賀本部の多目的プールです. このプールは潜水機器・水中機器の開発, 性能試験, 潜水技術者の訓練などを行うためのもので, 深さ3.3 mと1.5 mに分かれています. 下の写真は深さ3.3 mの部分にある観察窓から水中を見ている写真です.

(水面に反射して変なことになってます… )
最初にプールサイドで軽く自己紹介を行ったあと, 安全面の注意の説明を受けました.その後, ミーティング参加者の皆さんのロボットを見て回りながら防水技術, 潜水技術, スラスター関連の技術などを教えていただきました.お弁当箱も工夫をすれば十分にロボットに使えるそうです.
現在, これらの教えていただいた技術を参考にしながらロボットの製作を進めています.