15 の nomo ( @nomotech )です。
この記事はrogy Advent Calender 2020 24日目の記事です。
東京工業大学の公認サークル「ロボット技術研究会」のブログです。 当サークルの日々の活動の様子を皆さんにお伝えしていきます。たくさんの人に気軽に読んでもらえると嬉しいです。
15 の nomo ( @nomotech )です。
この記事はrogy Advent Calender 2020 24日目の記事です。
15 の nomo ( @nomotech )です。
この記事はrogy Advent Calender 2020 23日目の記事です。
RGB-Depthセンサを自作しよう【3-キャリブレーション編】の続きです。
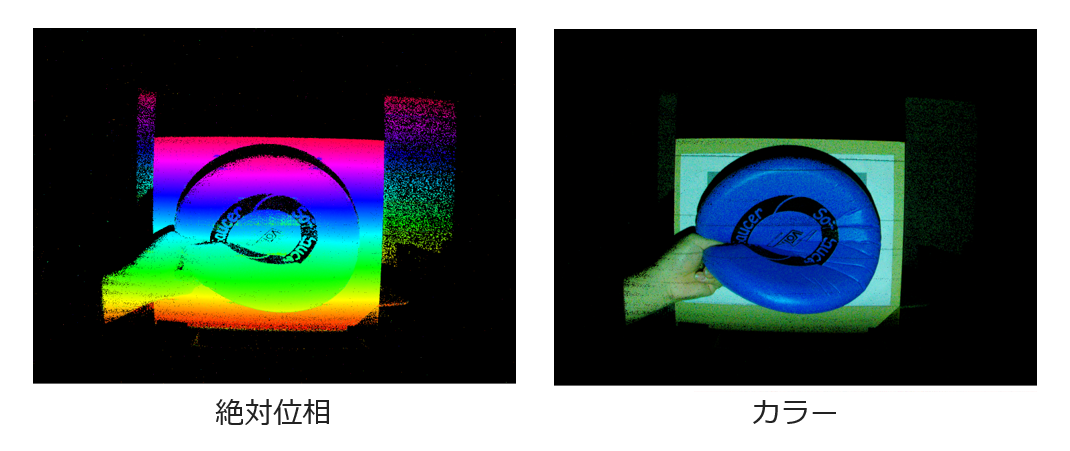
今回はついに構造化光法についてです。
絶対位相の計算とカラーの計算までを解説します。
15 の nomo ( @nomotech )です。
この記事はrogy Advent Calender 2020 22日目の記事です。
RGB-Depthセンサを自作しよう【2-同期撮像編】の続きです。
今回はプロジェクタカメラのキャリブレーションについてです。
まずはステレオカメラシステムの場合のキャリブレーションについて説明します。
ステレオによる深度推定はそれぞれのカメラの画素で同じ3次元点を参照している対応点を見つけて、三角測量によって深度を測定します。
カメラのステレオの場合、特徴点などを使って対応点を見つけます。
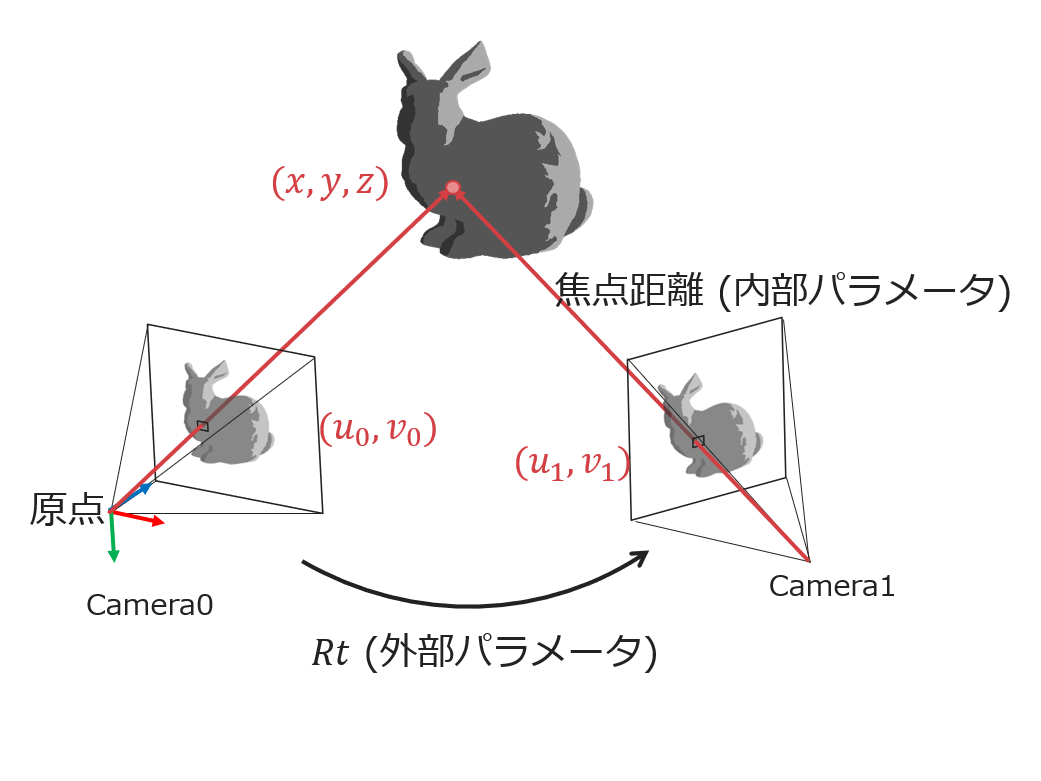
三角測量の時に必要なのはそれぞれのカメラから対象までの方向ベクトルです。
15 の nomo ( @nomotech )です。
この記事はrogy Advent Calender 2020 21日目の記事です。
RGB-Depthセンサを自作しよう【1-基礎知識編】の続きです。
今回は同期撮像についてです。
早速深度センサを自作していきます。
今回使用するのは以下の部品

“RGB-Depthセンサを自作しよう【2-同期撮像編】” の続きを読む
こんにちは、15 の nomo ( @nomotech )です。
この記事はrogy Advent Calender 2020 20日目の記事です。
ちょっと諸事情合って記事の公開が遅れました、すみません。
今回から 5 回にわたって連載していきます
まず1回目は基礎知識編です。
近年ロボットや VR などの分野で3次元計測の需要が高まっています。特に静止物体ではなく移動物体の3次元データが欲しいという機会は多いと思います。
皆さんは通常深度情報が欲しいなというときには市販の深度センサを購入して使っていると思いますが、市販されている深度センサは速度面で問題があったり使用用途に対して最適なものになっていなかったりすると思います。
実際ロボットで画像使いたい場合って長距離はLIDERとか使えばいいと思うんですが、ピッキングをする場面などで、近距離の物体の形状を知りたいというときにちょうどいい測定距離のセンサがあんまりなくないですか?
ということで、今回は高速に深度とカラーを得られるRGB-Depthセンサを自作していこうと思います。
“RGB-Depthセンサを自作しよう【1-基礎知識編】” の続きを読む