15 の nomo ( @nomotech )です。
この記事はrogy Advent Calender 2020 24日目の記事です。
東京工業大学の公認サークル「ロボット技術研究会」のブログです。 当サークルの日々の活動の様子を皆さんにお伝えしていきます。たくさんの人に気軽に読んでもらえると嬉しいです。
15 の nomo ( @nomotech )です。
この記事はrogy Advent Calender 2020 24日目の記事です。
15 の nomo ( @nomotech )です。
この記事はrogy Advent Calender 2020 23日目の記事です。
RGB-Depthセンサを自作しよう【3-キャリブレーション編】の続きです。
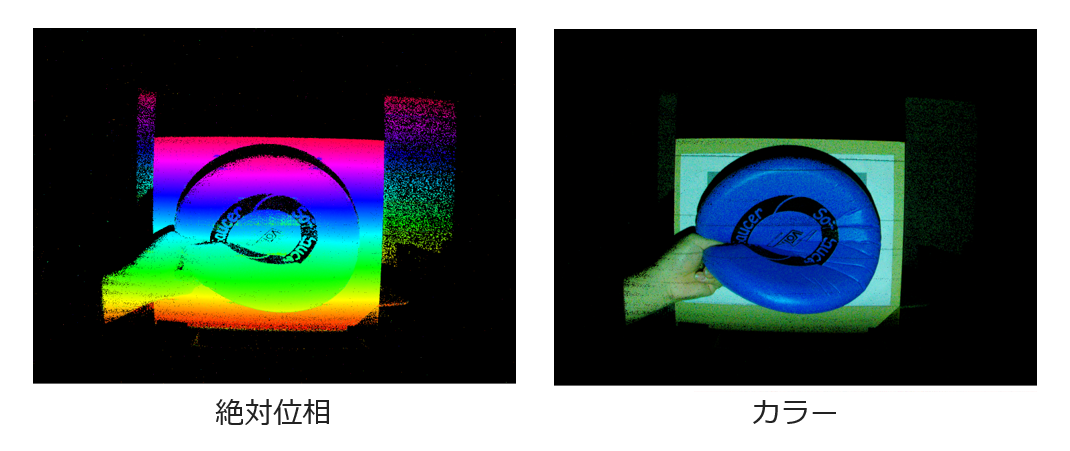
今回はついに構造化光法についてです。
絶対位相の計算とカラーの計算までを解説します。
15 の nomo ( @nomotech )です。
この記事はrogy Advent Calender 2020 22日目の記事です。
RGB-Depthセンサを自作しよう【2-同期撮像編】の続きです。
今回はプロジェクタカメラのキャリブレーションについてです。
まずはステレオカメラシステムの場合のキャリブレーションについて説明します。
ステレオによる深度推定はそれぞれのカメラの画素で同じ3次元点を参照している対応点を見つけて、三角測量によって深度を測定します。
カメラのステレオの場合、特徴点などを使って対応点を見つけます。
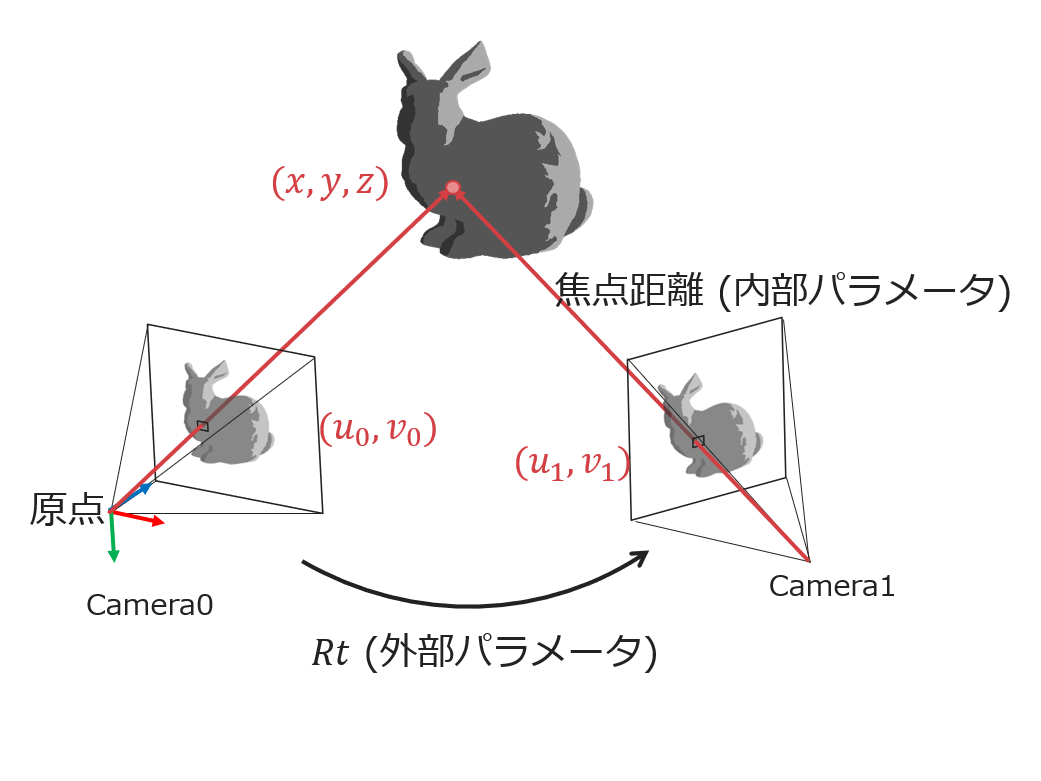
三角測量の時に必要なのはそれぞれのカメラから対象までの方向ベクトルです。
15 の nomo ( @nomotech )です。
この記事はrogy Advent Calender 2020 21日目の記事です。
RGB-Depthセンサを自作しよう【1-基礎知識編】の続きです。
今回は同期撮像についてです。
早速深度センサを自作していきます。
今回使用するのは以下の部品

“RGB-Depthセンサを自作しよう【2-同期撮像編】” の続きを読む
こんにちは、15 の nomo ( @nomotech )です。
この記事はrogy Advent Calender 2020 20日目の記事です。
ちょっと諸事情合って記事の公開が遅れました、すみません。
今回から 5 回にわたって連載していきます
まず1回目は基礎知識編です。
近年ロボットや VR などの分野で3次元計測の需要が高まっています。特に静止物体ではなく移動物体の3次元データが欲しいという機会は多いと思います。
皆さんは通常深度情報が欲しいなというときには市販の深度センサを購入して使っていると思いますが、市販されている深度センサは速度面で問題があったり使用用途に対して最適なものになっていなかったりすると思います。
実際ロボットで画像使いたい場合って長距離はLIDERとか使えばいいと思うんですが、ピッキングをする場面などで、近距離の物体の形状を知りたいというときにちょうどいい測定距離のセンサがあんまりなくないですか?
ということで、今回は高速に深度とカラーを得られるRGB-Depthセンサを自作していこうと思います。
“RGB-Depthセンサを自作しよう【1-基礎知識編】” の続きを読む
この記事はrogy Advent Calender 2020 14日目の記事です。
こんにちは、15 の nomo ( @nomotech )です。
この記事は昨日 Loop 君が書いてくれた 【Gano剣】第11回 ROBO-剣(アーム型) 参加報告 – 機構編 – の続きです。
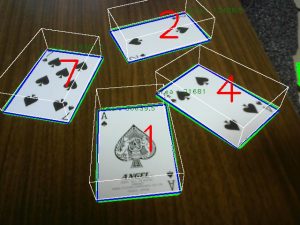
今回は画像処理について解説していきます。
私は動きの速いものに対する画像処理は高速である必要があると思っています。しかし大抵のロボコンではロボットは高速に動くのに対して画像処理の高速性にはあまり注目されていないような気がします。
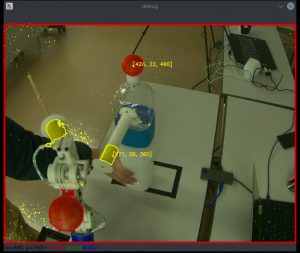
そこで私はこのROBO剣で高速に画像処理をして相手の技をすべて見切ってやろうと考えていました。
が、残念ながら今年のROBO-剣はオンライン開催になり、ロボット同士の剣道の試合ではなく制限時間内にダミーロボットにどれだけ技を決めることができたかを競うルールになってしまいました。
残念ながら認識する相手は動かないダミーロボットですが、来年のことも見据えて高速なリアルタイム画像処理を実装しました。
“【Gano剣】第11回 ROBO-剣(アーム型) 参加報告 – 画像処理編 –” の続きを読む
どうもこんばんは
ロ技研会長の15 のもと です。
この記事は rogy Advent Calendar 2019 25日目の記事です。
といってももう12/28日、研究やらで忙しくて記事を書くのが遅れてしまいました。申し訳ない m(_ _)m。
私は高速画像処理の研究をしているのですが、ロボット勢にもっと画像処理をやる人が増えてほしいと思うので、今回は「リアルタイム画像処理入門」と題して記事を書いていきたいと思います。
画像処理は一般に処理時間が結構かかってしまいます。しかし、動いているものを対象とした画像処理やロボットなどにカメラを乗せて画像処理をしたい場合には遅い速度の画像処理では間に合いません。
例えば3m/sで飛んでいるボールを画像処理で認識してキャッチしたい場合に、画像処理に10fpsかかるとすると処理に100msのインターバルがあるので、画像をとってから認識が終わる間に30cmも移動してしまっています。そのため、物体の移動を予測する必要が出てきます。
しかし、もし超高速に画像処理ができればどうでしょう。ここで私が説明するよりも例えば東大の石川研究室の動画を見れば高速な画像処理の効果が理解できると思います。
どうもこんばんは、15-nomoです。
こちらはrogy Advent Calendar 2018の25日目、最後の記事になります。
本当はいま自作している自分のblogで公開したかったのですが、間に合わなくてrogiken blogに投稿します。 自作blogについてはまた今度。
また、記事も最近作っている三輪オムニボールについて書こうと思ったのですが、回路にミスがあったのでこちらもまた今度にします。
ということで今回はLinePictureという作品について書きたいと思います。
こんにちは、15の野元です。
今年もロボット技術研究会派MakerFaireTokyoに出展が決まりました!
MFT(MakerFaireTokyo)とは年に一度東京ビッグサイトで開催されるものつくりの展示会です。今年は8/4(土),8/5(日)に開催されます。
今年展示する作品たちを紹介した記事がこちらです。
こんにちは、アシスト研代表の15 nomotechです。
新歓ブロググリレー18日目の記事です。

240MHzのデュアルコアCPU搭載!
WiFi、BLEの無線が使える!
そして1500円ほどで買えてしまうという破格の値段!
(チップだけなら550~700円)!
これは買わない選択肢がみあたらない!
そして開発は公式のIDFもしくはArduino IDE!
そう、初心者がよく使うArduinoIDEで文法もほぼ同じで開発ができてしまうのだ!
ESP32には今まで問題が、それはBluetoothは使えるが、BluetoothでSerial通信が出来なかったのだ
しかし、つい最近のアップデートによりBluetoothSerialのサンプルコードが公開されました!!!
ということで今回は早速BluetoothSerialを試してみたいと思います。
ESP32は書き込みなどで使うように有線でSerial通信をすることができますが、有線だとデバックのときに毎回近くまで行ってつながなければいけないし、有線でつながっているものとしか通信をすることができません。
Bluetooth Serial通信ができると、PCやほかのマイコンとの間で無線で通信することができます。
無線で情報をやり取りできると遠隔で操作したり、デバックがはかどったりします。
“ESP32でBluetoothSerial通信をしよう!” の続きを読む