皆さん!度々こんにちは。
今回は甘い食べ物の話…
ではなく、甘い想定がもたらす被害のお話です。(知ってるよって人はごめんね)
甘い話
私は、今から約二ヶ月前に野菜の値段の高騰に苦しんでいました。
お値段が上がるとどうしてもお金がなくなって不景気になります。
これに例外はないでしょう。
なので、なんとか安く済ませられないだろうか?と考えました。
調べてみると野菜の値段の高騰は、野菜の価値の高騰ではなく、輸送費の高騰によるものということがわかりました。
ということは、論理的に考えれば自宅で作れば安く上がるということにならないでしょうか?
ついでに私は最近収入があまりないので次世代機の制作費を捻出する方法を考えていました。
このプラントをなんらかの形で収入源にできないでしょうか?
こんなことを考えながら私はこの企画を始めました。
順調な滑り出し
これを検討し始めて、最初に思ったのが、自分で水やりや雑草管理などのタスクを全て処理するのは、生活と両立するの大変だなぁということでした。
これをせめて水やりと雑草・害虫駆除だけでも自動化できないか?ということを私は検討し始めます。
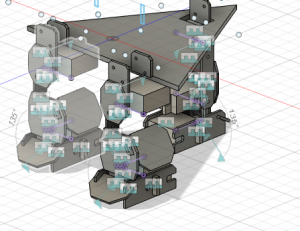
このうち、水やりについてはいくつかのブログと、あるサークル内の仲間からの助言によって電磁弁で水流制御を行えばいいというふうに検討しました。
また、これを開発機材ごとフリマで売って仕舞えば、私の開発予算をやや増やしつつ次世代機に導入したい技術を全て投入、テストすることが可能になると結論しました。
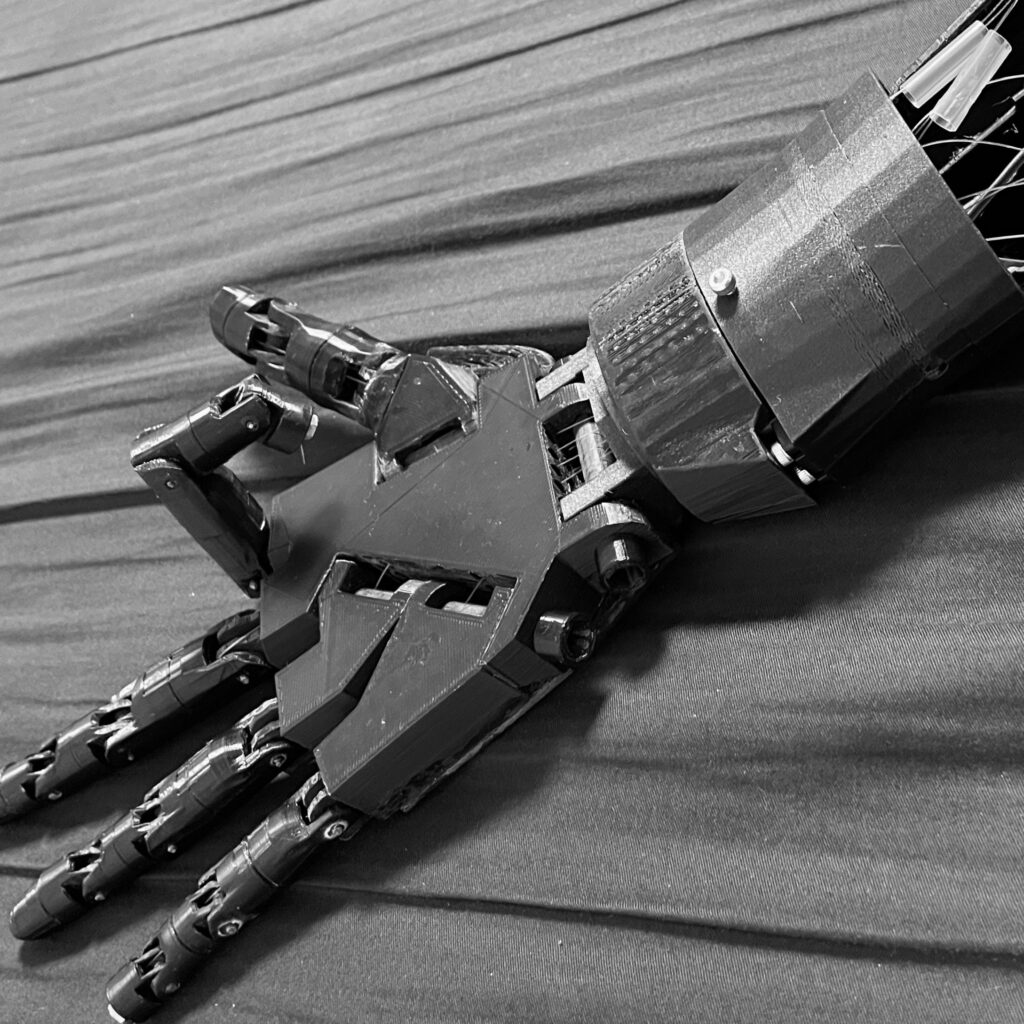
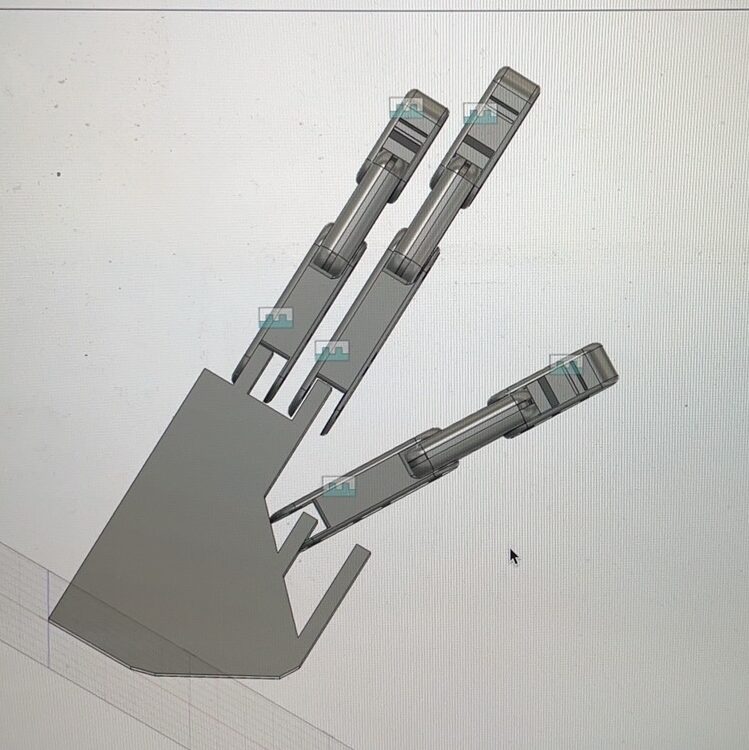
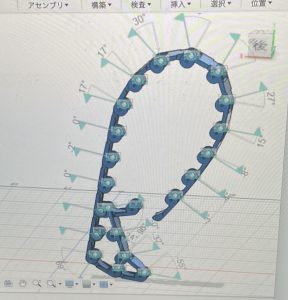
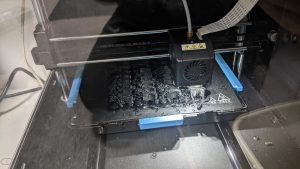
また、遂行し始めてたったの二週間で以下の状況が整いました。
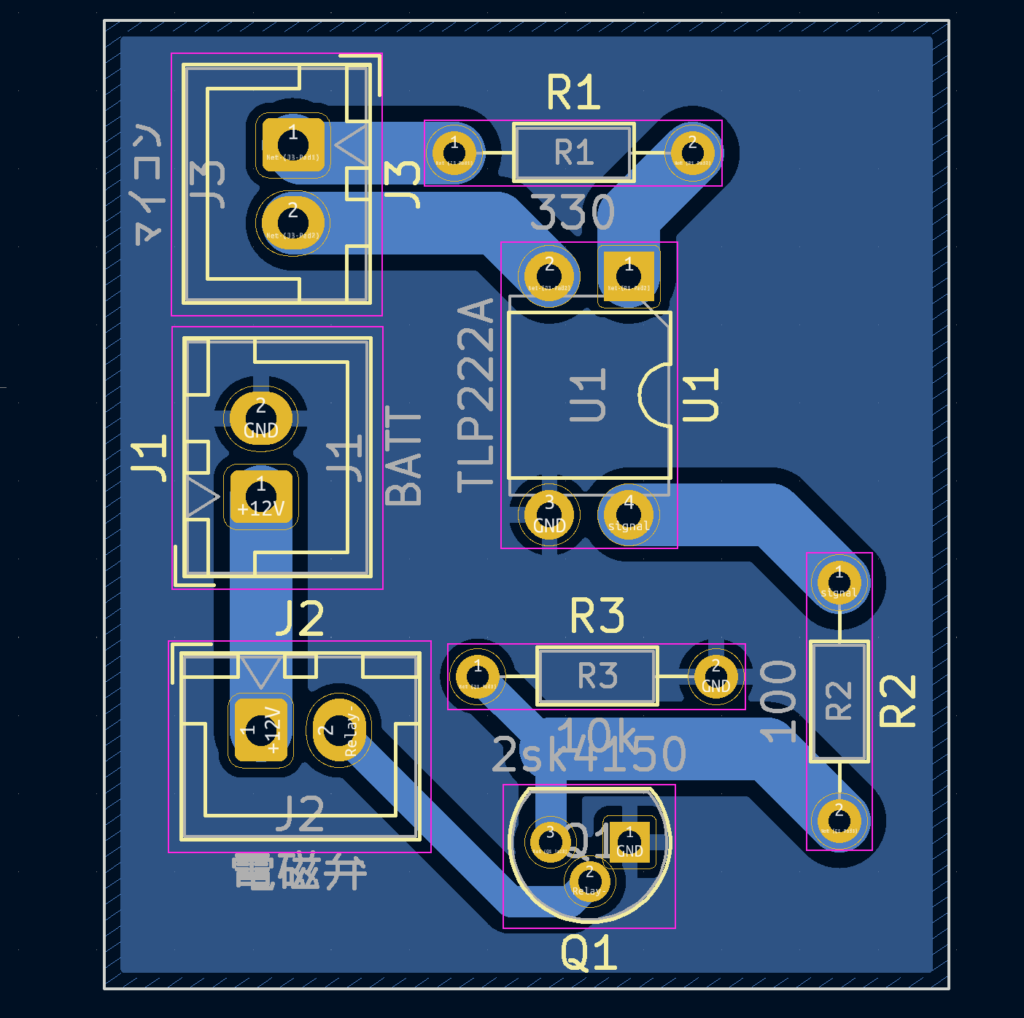


ハードウェアの基本構成は割とすぐに揃ったのです。
崩壊の始まり
しかし、計画がいかに順調に滑り出そうと、どこにでも失敗の要素はあるものです。
ましてや単独で動く企画は誰からもFBされないので確率はより高くなります。
私が最初に直面した課題は市販品のACアダプタが壊れていたことでした。
この事態は想定していなかったため、動揺して問題が市販品であることを認めるまでに二週間もの時間を支払う羽目になりました。そのことは自分の研究室配属前に爆速で処理しようという計算を狂わせ、結果配属待ちで基板発注する計画がオジャンになりました。結果的に追加で約二週間もの手待ちを発生させることになってしまいました。
また、悪いことというのは連鎖で起こるもので、この手待ち期間に概ね損害規模が大きかったものだけでも以下のような状況が起こりました。
- バイトをクビになる
- 交通事故に遭う
- 高熱が出る
- カフェイン中毒で頭痛が止まらなくなる
- 研究関連で解読しなきゃならない文献が大量発生する
- 期末テストの発生
- 留学関係での想定外の出費
- 親知らずの痛み再発
これらは僕が持っていたなけなしの予算とやる気を吹っ飛ばして1日の睡眠時間をトリプルスコア化するのに十分すぎるダメージを叩き出しました。
甘くない話
そもそも論として、次世代機を作らずにこれを開発し始めたのがモチベーションの回復と予算の復活待ち、さらに実験であったことを踏まえると前項のダメージはありえん話です。
さらに、収入の当てがない条件下での予算の低下ゆえに手持ち資金が 過去最低にまで落ち込みます。
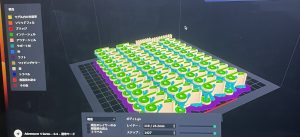
結果として、基板データを各種生成したものの、別に売れることの確約も、思うように動作することの確約も取れないという状況が私に以下の決意をさせます。
どうせ発注1回分しか費用は残ってないんだし、他の並列プロジェクトを完遂するまで放置しよう。
当然と言えば当然ですが、並行で進めるプロジェクトの全てがうまくいくわけはありません。
結果として、この企画を含めて計4種類のプロジェクトがたった1個の失敗によってストップ、現在に至るまで進捗が発生しないという驚異的な事態が引き起こされてしまいました。
ここで手待ちした結果、とあるプロジェクトの劇的な大失敗によって最後の一撃案件になり、全ての計算は吹っ飛び、私は企画自体を達成の見込みが限りなく弱めて再編することになり、私に実行が可能なものは、電気的に水を流すか流さないかを選択する装置を採算も取れない形で数ヶ月かけて実装するという悲惨な計画に転身してしまいました。
まとめ
想定は常に厳しく見積もるべしという格言があります。
しかし、私が皆さんに伝えたいのは、最悪の事態というのはいかなる場合でも所詮は想像ができる範囲に過ぎないということです。
であるならば、最良の対策は、最小構成物を最速で既存技術の組み合わせで作ることであると思います。
未来はあくまで過去の積分でしかないので、急激になにか離散的な進捗が出る前提で企画を立てれば必ず破綻します。
皆さんが私と同じように新規のプロジェクトを考える機会があったら、こういったことを踏まえてみると幸せになれるかもしれません。
それでは皆さん、楽しいものづくりライフを!
おまけ
せっかくなので甘い話として下に、適当なチョコケーキのレシピを載せてみます。
材料:
- 2カップの小麦粉
- 1¾カップの砂糖
- ¾カップのココアパウダー
- 1½ティースプーンのベーキングパウダー
- 1½ティースプーンのベーキングソーダ
- 1ティースプーンの塩
- 2個の大きな卵
- 1カップの牛乳
- ½カップの植物性油(サラダ油など)
- 2ティースプーンのバニラエッセンス
- 1カップの熱いコーヒー(水で代用可能)
手順:
- オーブンを180°C(350°F)に予熱します。
- 9インチの丸型ケーキパンを準備し、底をバターで塗り、薄く小麦粉をまぶします。
- 大きなボウルで小麦粉、砂糖、ココアパウダー、ベーキングパウダー、ベーキングソーダ、塩を混ぜます。
- 別のボウルで卵を軽く泡立て、牛乳、植物性油、バニラエッセンスを加えて混ぜます。
- 湿しボウルの中に、乾燥した材料を少しずつ加えながら混ぜ、滑らかな生地ができるまで混ぜます。
- 最後に熱いコーヒーを生地に加え、よく混ぜます。生地は少し薄くなりますが、これでOKです。
- 準備したケーキパンに生地を注ぎ、オーブンで約30〜35分、竹串を刺して生地がついてこなければ焼き上げます。
- ケーキをオーブンから取り出して、完全に冷ませます。
- 冷めたら、お好みでチョコレートガナッシュやバタークリームを塗ってデコレーションします。