前回に引き続き若葉祭レポートです。どうも20-Aoです。
それではさっそくまいりましょう。
展示品紹介
Cheese
こちらも研究室単位での参加です。マイクロマウスを扱っているCheeseの方が2日目より急遽参加してくださいました!

Assist研
こちらもTwitterでの紹介から漏れてしまったのですが、原因はいい写真が撮れなかったからです。ごめんなさい。
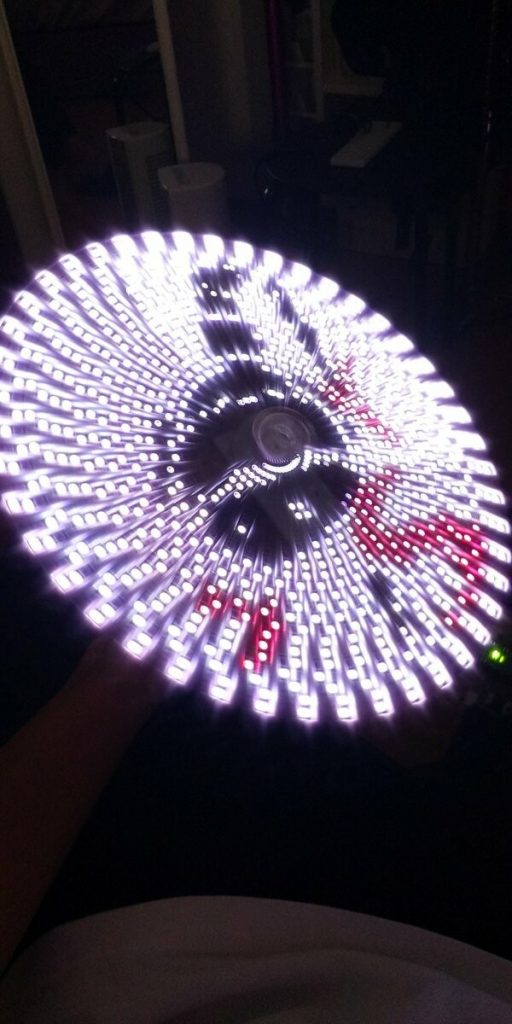
Assist研から21の方が参加してくださいました。LEDバーを回転させて画像を浮かび上がらせるバーサライタです。
ロ技研のサソリマークと「ロ」「技」「研」の文字が順番に表示されます。
新入生の皆さんにその旨を説明すると、「えっ…あっ!えっ…(困惑)? あっあ~(理解)」という反応でした。一回見えるようになるとわかりやすくなるんです。
この作品は若葉祭2週間前くらいから急遽作ってくださいました、ありがとうございます!
卓上PONG
@takupon009 さん作「卓上PONG」のプレイ動画です!
若葉祭にお越しいただくと対戦することができます! pic.twitter.com/VRzyoTzBmj— 東工大ロボット技術研究会 (@titech_ssr) April 17, 2022
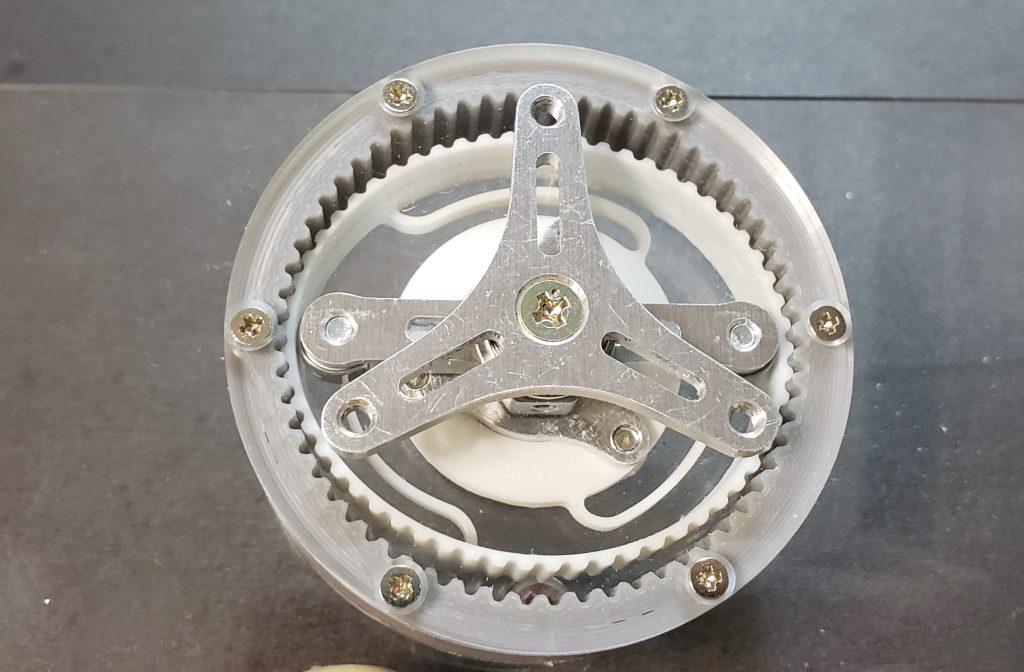
18-takupon さん製作の卓上PONGです。ATARI社のPONGを再現した製作物で、動画で回しているハンドル部分にはお手製の波動減速機が入っており、のぞき込むとうねうね動いているのが見えて楽しいです。
また、筐体の一部が透明になっているので内部の機構を見ることができます。
↓は内部に入っている、回転を直線運動に変えるポーエスリンクです。
ポースリエリンクと原動節角度取得用のポテンショ&ギア pic.twitter.com/ZVKU7kwnUT
— たくぽん (@takupon009) April 9, 2022
Maquinista
最後はMaquinistaの機体です。
展示品紹介
Maquinista:NASUNO HOJO
です!
昨年のNHKロボコンに出場した機体です。間近で見ると大迫力!是非お越しください! pic.twitter.com/nAXso4bN3W— 東工大ロボット技術研究会 (@titech_ssr) April 16, 2022
Maquinistaからは昨年のNHKロボコンに出場した2機が展示されました。昨年のNHKロボコンのルールは投壺という中国の競技がテーマでした。それに合わせて矢を投擲する機体と、相手の矢を妨害する機体が製作されました。詳しくはMaquinistaのブログからどうぞ!
新入生のみならず、現役部員も時間を見つけて質問をしたりしていました。
2日目にはこれとは別の機体の実演がありましたが、あいにく私はほかの業務があったため行けず…写真を撮りそこねました。見たかった!
終わり
以上が今年の若葉祭の展示でした。ご協力いただいたみなさん、お越しくださったみなさん、ありがとうございました!
次回は順当にいけば工大祭かと思われます、お楽しみに!