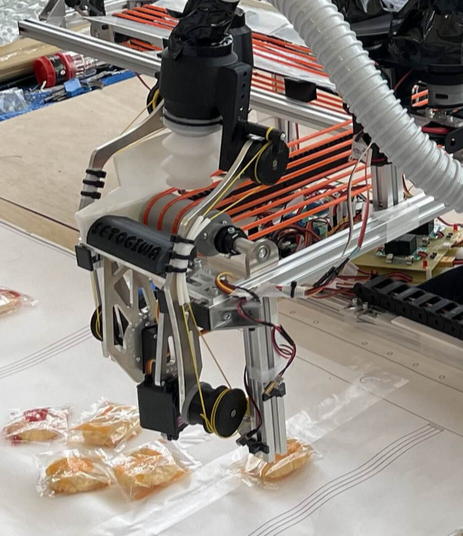
まずは機体
名前を付けてなかったんで特に呼び名はないんですけど、私はIKEAのサメが好きなので「ゴルフサメサメ」とでも呼んでおきます。
うーん、カッコイイですよね。見た目はこだわりました!(動くかどうかは別問題……)
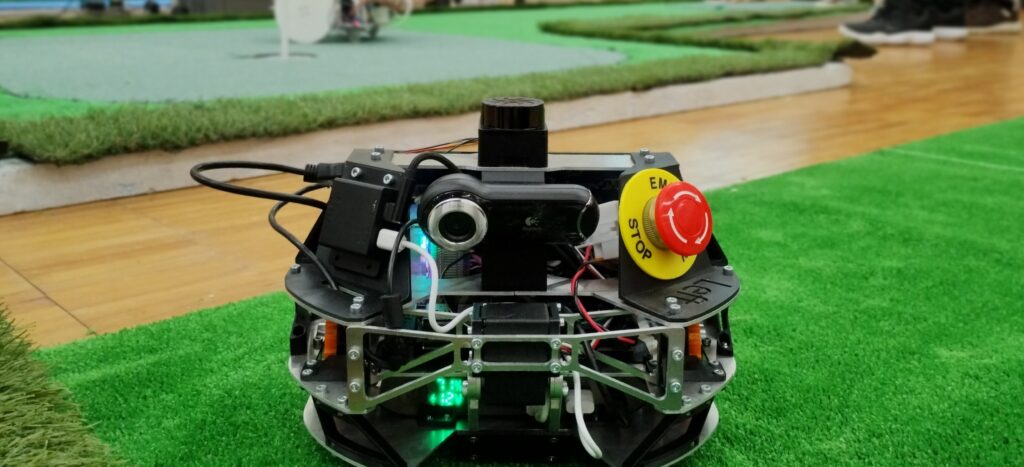
簡単に説明すると、このロボットでゴルフボールを自動でゴールに入れます。もちろんボールの認識もゴールの認識も自動です。なのでそれなりに良い(良さをどう定義するかによるが)センサが載ってます。パソコンも載ってます。右側に見えるボタンは緊急停止用のボタンですね。
東京工業大学の公認サークル「ロボット技術研究会」のブログです。 当サークルの日々の活動の様子を皆さんにお伝えしていきます。たくさんの人に気軽に読んでもらえると嬉しいです。
名前を付けてなかったんで特に呼び名はないんですけど、私はIKEAのサメが好きなので「ゴルフサメサメ」とでも呼んでおきます。
うーん、カッコイイですよね。見た目はこだわりました!(動くかどうかは別問題……)
簡単に説明すると、このロボットでゴルフボールを自動でゴールに入れます。もちろんボールの認識もゴールの認識も自動です。なのでそれなりに良い(良さをどう定義するかによるが)センサが載ってます。パソコンも載ってます。右側に見えるボタンは緊急停止用のボタンですね。
皆様ごきげんよう。
(2024年度)部長の22-Daito(daidai)です。
去る2025/3/23(日)に部会&第80回研究報告会(2024年度後期研究報告会)を行いました。

対面20名、オンライン20名ほどの参加になりました。
最近は部会もオンラインなのもありオンライン参加する人が増えていますね。
今回の研究発表会では以下の団体/個人により発表が行われました。
個人で発表する方が前期より増えて個性的な発表が聞けました。SSR杯チームの発表が前期でのコンセプト発表から時間が経ち、部内ロボコンの厳しさを乗り越えた内容の発表をしているのも印象的でした。
“第80回 研究報告会(2024年度後期)” の続きを読む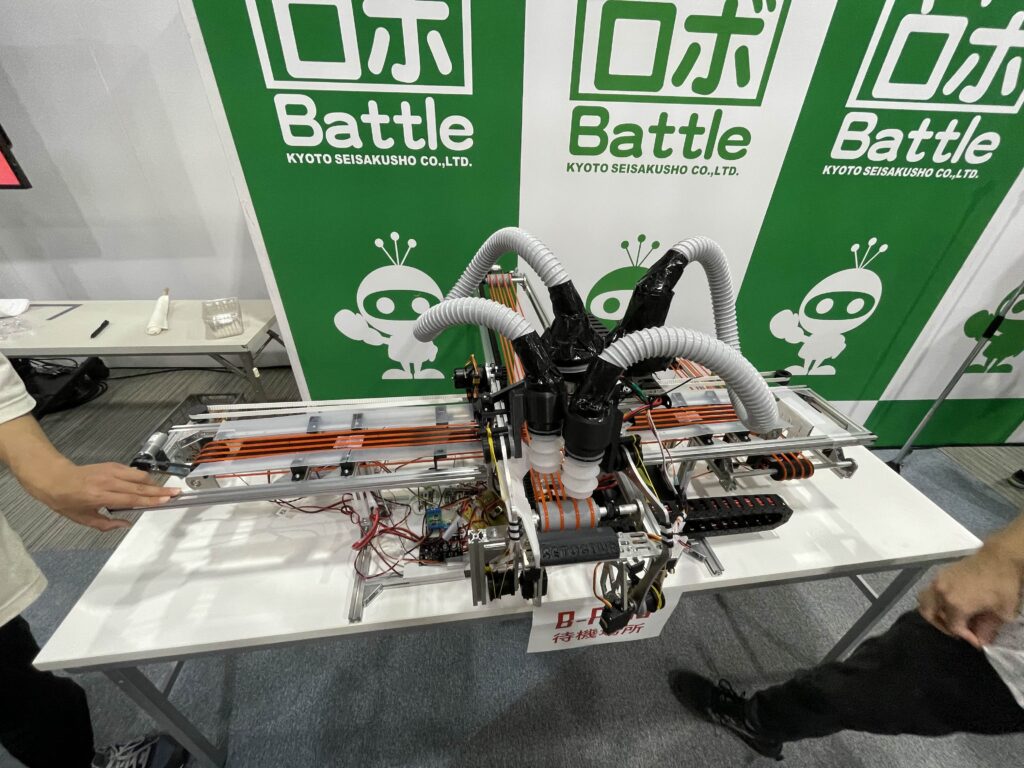
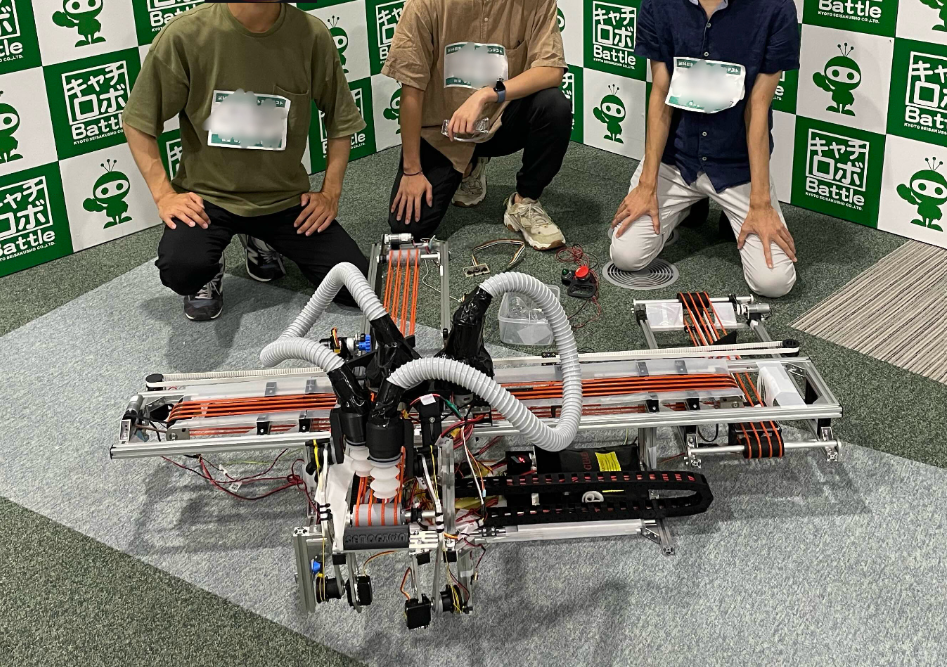
機体名:「せともの」
機能:手先をxy方向に駆動/2つのハンドで吸着/ベルトでの搬送/有線コントロール(位置制御)
試合での最高点:19点(通常+18ボーナス+6減点-5)
理論値としてはボーナスとかすべてがうまくいけば通常27、ボーナス18で45点くらい行けるという想定だった。(実際はベルトのつまり、ハンドの吸着とかがかなり難しく、操縦者の22-Daichiと22-McbeEringiが頑張ったので何とか19点取れた感じ)
22-daito:全体管理、ハンド、アーム初期設計辺りを担当
22-Daich:アーム、強電あたりを担当
22-McbeEringi:回路全般、制御全般あたりを担当
メカ周りは1か月前には終わらせて追加機能とかやりたいねとか言う話をしていましたが、結局本番仕様になったのは超直前でした。一応動く~くらいまでは予定通りだったけど、そのあと本番これで行こうの完成度になるまでの労力見積もりが甘かった。
アーム
基本コンセプトとして
があった。2段3段にするつもりだったものの、後述するベルト運搬方式のシューティングに変更したためxyテーブルはそれぞれ1段となった。
駆動はロボマスで十分以上で、ラックとピニオンが3Dプリンタ製だが意外と耐えてくれたのもありスムーズに動作した。
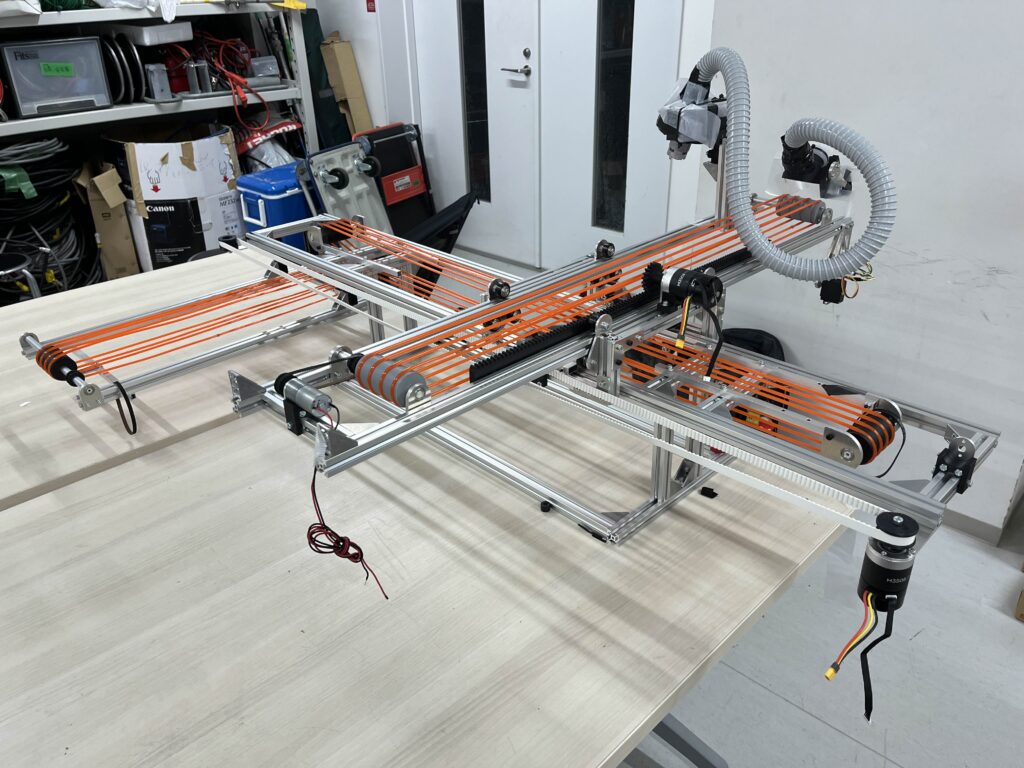
主に土台も含めたy軸フレーム、xyをつなぐジョイントユニット、先端にハンドがついたxアームで構成。
結構軽量でできて1週間間に形になった時点で軽量して8kgだったので、16kgの重量制限楽勝だなガハハと言っていたら、直前につけたケーブルやら補強やらで当日16kgを少しオーバーして焦る羽目になった。ネジやナットケーブル類は数あると意外と重いという教訓。
ほぼ限界サイズで作ったが、アルミフレームで分解して運べたので遠距離参加だけど何とかなった。その代わり大会初日は組み立てて終わった。
ハンド
mg996r1つ/ハンドで姿勢保持で動作しつつ、アーム先端に付けるためなるべく軽くしたことがこだわりポイント。
元々は平行リンクで姿勢保持していたが、特異点の問題でたまに手先がひっくりかえってしまうという問題点があったため紐で姿勢保持することに変更。
ベルトが理想だったが、テンション欠けたりでめんどくさいの考えると太めの水糸なら強度十分だよねと考えてTPFEチューブをガイドとして使用。テンションは人力で頑張ってセットしたけどメンテ性がよくなかった。
吸着はマキタの掃除機のファンユニットからダクトホースを伝って伝達。
手先は3Dプリンタ型でシリコン成形して自作。シリコン成形は色々試して結構うまくいったのと、吸着性能の向上以外にクッションになってせとしおの破損を防いでくれたのも嬉しいポイント。
ほんとは3つ付けてキングギドラしたかったものの干渉やら期限やら操作性やらで本番では2アームに。片方が調子悪くなってももう片方で多少何とかなったのは助けられた。
シューティング

物流倉庫的な発想で丸ベルトのラインで瀬戸塩を運搬し、仕切り板みたいのを動かして任意の場所に落とす作戦。
2人操作がルールで認められているので一人はピッキング、一人はシューティングというので分けられて効率アップを狙った。結果的にそこそこうまくいった。
ベルトはDCギヤードモーター、仕切り板はサーボで動かしている。
DCギヤードモーターと用意したモタドラの相性が悪く、そのことに気づくまで結構時間がかかったことにより地獄だった思い出。初動でそんなに電流食うのねキミ…
分担の流れ作業で効率は良かったものの欠点としては、丸ベルトの隙間とかライン間で瀬戸塩を落とすときにたまに詰まる(ベルト逆転させたりガチャガチャさせると治ったりする)ことや、落下防止をつけていてもせとしおを落として減点になってしまったりした点。あと丸ベルト溶着で長さ調整できるのは良かったけど慣れるまで火傷したり大変だった。あと組み立てメンテ性が悪いことに苦しめられた。
実はコートのどっち側に配置されるかでシューティングの左右が変わるので組み替えないといけないのだが、この組み換えは約一時間要するので予選のコート分けによっては組み替えられない事態が発生するところだった。この問題はすべての試合赤コートを引くという豪運で解決した。
設計がよかったのかモタドラ以外の部分で大きく遅延することがなく、そのおかげで大会当日動きましたありがとう。
強電
3Sと4SのリポをDCモーター、ロボマス、弱電へ降圧へ分電しつつリレーをかませて緊停できるようにしている。禁停ボタンは主電スイッチを兼ねており酷使されたがちゃんと止まってくれた。直前に完成したが22-Daichiの丁寧な仕事により負荷がかかった時もちゃんとヒューズが壊れて止まってくれた。
余談だが、もともとはロボットの大きなコンセプトの一つに60W30Vのモバイルバッテリー2つでtype-cのPD給電で動かそうぜ!というのあり、計算上行けたのと実際途中まで動作していたものの、実験中におそらくモータの急逆転時の逆起電力によりモバイルバッテリー1つ(22-McbeEringiの私物)とPD充電器(22-daitoの私物)が葬られてお通夜になったので、ちゃんとlipoに保護回路いれてやろうということになった。そのため結構直前まで安定化電源装置2台給電で動いていた。
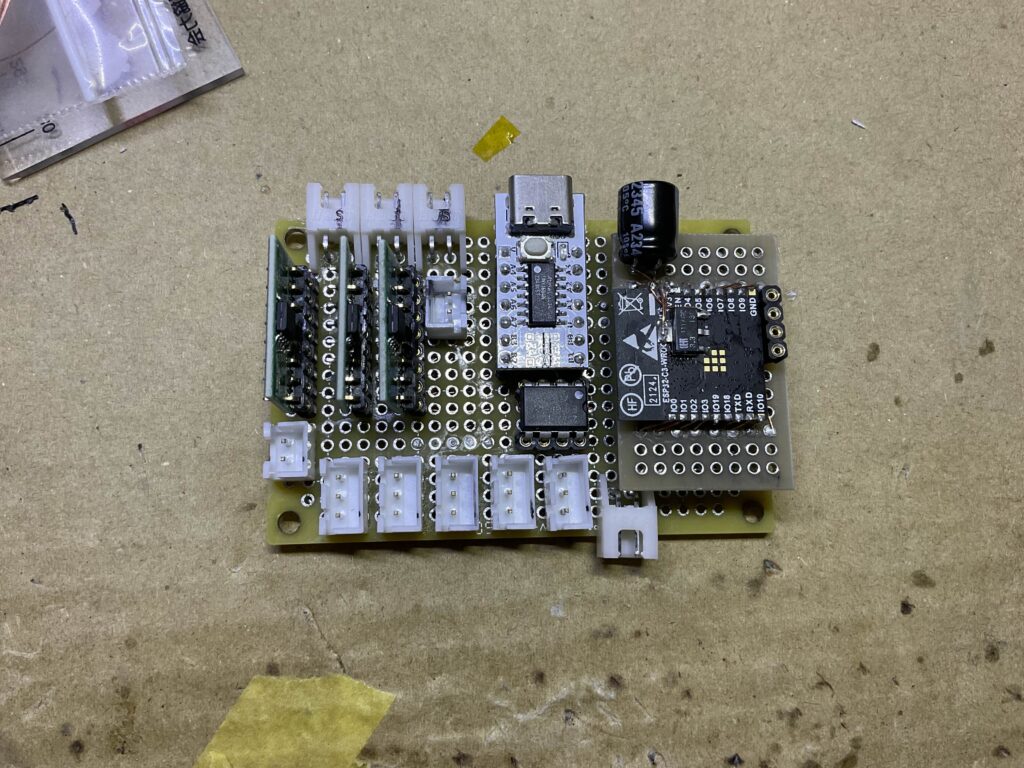
制御基板とコントローラ
元々McbeEringiが作っていた極小attiny基板を複数つないで基板見えないくらいにする予定であったが、色々あってesp32を主マイコンとして使用。
DCモーターとモタドラの相性とかで苦しんだものの回路自体はほぼ問題なく最後まで動作してくれた。

構成詳細
サブctl
マイコン間通信は一方向のUART
一つのデータは8bitで完結させることでパケロスによる通信のロスを低減
回路で大体述べてくれたので
https://github.com/McbeEringi/setogiwa
を参照。
初期設計からでうまくいったところしては、アルミフレームベースの設計、吸着周り。
修正してよかったのはベルトコンベア、電源と制御基板。
反省としてはメンテ性が低い、部品点数が増えすぎたところ。
モジュールごとに分担していたのはいいけど組み立て統合で時間とられ過ぎたのが完成度に結構影響してしまった感想。
次作るロボットは機能絞ってその代わりに分解組み立てしやすくしたいお気持ちです。でかめのラジコン系とかつくりたいな
目指せ外装までこだわれるロボット!
こんにちは。22年度入学でB3のdaito(と22-Daichi、22-McbeEringi)です。
大学混合3人チーム「せとぎわ」として京都府のけいはんなオープンイノベーションセンターで行われた2024年度のキャチロボバトルコンテストに参加してきたのでその報告をさせていただきます。
結果から言うと全体70チーム中だいたい20位で本選出場ならずだったもののエキシビジョンに出場させていただきました。
大会中継のYoutubeのアーカイブはこちら
咋年度に先輩チームらが制作しているのを見て漠然といつか出てみたいな、という思いがあった22-daitoが残り二人を勧誘して出場しました。
4月チーム結成でメイン稼働は夏休み期間、場所は主にロ技研で活動していました。
今年のルールは「Catch the 瀬戸しお!」ということでフィールド上にランダムに配置された瀬戸塩を最大36個、制限時間3分で回収するというもの。
Youtubeとかで動画を見てもらうと規模感が分かりやすいと思います。

今回キャッチした瀬戸しお(栗山米菓)。実験で破損したり知らんうちに誰かが食ってたりするので近くの東急ストアで補充していました。
結構壊れやすい対象で割ってしまったり落すと減点になるのもあり、優しく早く確実にピックするというキャチロボの難しさを感じるルールでした。
ざっくり開発スケジュール
4月 チーム結成
5月 始動、各自要素実験
6月 ハンドとアームの初期のができる→修正へ
7月 アームv2、ハンドv2の初期ができる
8月前半 アームとハンドの概形が完成、部分的に統合して動作テスト
8月後半 ベルトコンベアや回路(制御まわり)が付く
9月前半 電源回路が付く、シューティングが付く、ハンド増設、制御
9/12 早朝東京出発、夕方奈良着、ホテルで回路を仕上げる
9/13 準備日:ばらばらにして輸送した本体の組み立て、回路制御確認
9/14 午前準備:計量オーバーしたので軽量化、操縦練習、テストラン。午後予選
9/15 本戦(エキシビジョン出場)
9/16 京都製作所の工場見学をさせていただく→車で東京へ


現地進捗してる様子
機体 -173000円
宿泊・移動 -57000円
参加特典・遠方補助 +40000円
合計出費約19万
3人チームなので1人63000円くらい
賞もらえなかったので赤字だけど遠征込みにしてはがんばって安く収めた。
大きかったなと思うのは
東京から車で行ったことで色々便利だったけれども保険ガソリン高速料金とかでなんだかんだ3人で5万くらいになったので新幹線とそんな変わらない気もする。
色々大変なこともあったし本戦まで行けなかったのは悔しいですが、大会でロボットがちゃんと動いて良かった!メンバーのみんなもありがとう&お疲れ様です。
キャチロボ参加してみてルールも面白いし、勝ちに行くにもネタ的に面白いものを作るにもいい大会だと感じました。みんな出てみよう。
自分が今後ロボコンまたやるかは未定だけどいろいろ学べた気がする。
運営・参加者の方々ありがとうございました。
皆様ごきげんよう。
部長の22-Daito(daidai)です。
去る6/30(日)に部会&第79回研究報告会(2024年度前期研究報告会)を行いました。

前回のマルチコア時に発生したバグや実装時の注意点の続きです。ここではLinuxを動かした際に出た、ハードウェアバグに関わるカーネルパニックや厄介なエラーを見ていきます。
またそんなバグを特定するために作ったデバッガの紹介もします。
“RISC-VでLinuxの動くマルチコアをつくるのにやったこと (3. 実装・デバッグ編2)” の続きを読むRISC-Vのマルチコア化をやっていますが、1コアでも複雑極まりないプロセッサが2つになってデータの取り合いをするのですから、厄介極まりない事態となります。特にマルチコアでは複数のコアが同じデータを書き換えたりするので、適切な制御がないとデッドロックやデータの破損(異常値)が起こります。
ここではその厄介な状況に対処している仕組みや、実際に起こった厄介な事例の紹介をします。
“RISC-VでLinuxの動くマルチコアをつくるのにやったこと (3. 実装・デバッグ編1)” の続きを読む皆様こんにちは。18のhiraです。
前回ではRISC-Vマルチコアのために必要なハードを書きました。今回はマルチコア上で動くLinuxの作製方法についてです。
(とはいえ動けばいいやのニワカ調べですが…)
皆様こんにちは。18のhiraです。
僕はコンピュータ工学をやっているつもりで、研究ではRISC-Vのプロセッサをマルチコアにする作業をしていました。とはいえ、どういう機能を追加する必要があるのか、それはハードで実装するのかソフトで対処するのかなど戸惑ったことも多かったため、備忘録として残しておきたいと思いました。