皆さんごきげんよう。
17の信風です。
この記事は新歓ブログリレー25日目最終日の記事です。
さてみなささんはロボコンを見たことはありますか?
僕は大学に入るまで、2回くらいしか見たことがないです。
今ロボコンをやっている僕でさえそんな感じなので、最近やってきたロボコンを紹介したいと思います。
何もロボコンはNHKロボコンだけじゃないぞ!!
でもNHKロボコンも面白いぞ!!!
僕たちの関東春ロボコン
ロ技研に入るとロボットなどの製作経験の有無関係なく、F3RCという新入生ロボコンに参加できます。
そのF3RCが終わってから”こんなもんじゃ終わらせない”と結果に満足いかなく再挑戦したいと思った5人で関東春ロボコンに出ることにしました。
では僕たちのでた関東春ロボコンはどんなものかというと、
関東近辺のNHKロボコンを目指す大学・高等専門学校の新人チームによるロボット競技会
です。
そして意気込んで出場した関東春ロボコンの戦績は以下の様になりました。
| 予選一戦目 | 予選二戦目 | 決勝トーナメント | |
| 対戦相手 | トンネル効果(東大) |
春休みドロップアウト (横浜国立大学) |
トンネル効果(東大) |
| 結果 | トンネル効果(東大) |
春休みドロップアウト (横浜国立大学) |
トンネル効果(東大) |
| 得点(東工大-相手) | 0-0 | 0-0 | 0-21 |
うーん。。。難しい。。。。。。
ただ表のような戦績となったため、結果としてはベスト6ということになりました。
僕らの機体
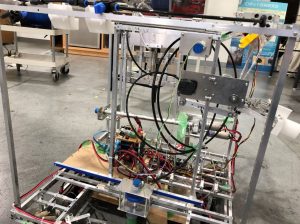
次は私たちが作った機体について紹介だけしたいと思います。
機体の全体像はこんな感じ

そして、腕は2つ。
なぜ腕が2つ着いているかというと、これは勝つためには3つの里から養生テープを取る必要がありました。
ただ、この3つの里のうち2つは1つのアーム(a)で対応可能であり、
残りの一つの里はもう一つアーム(b)を用意して一気に回収してしまう方が効率的と思ったからです。
そのため、アームは以下の2つにしました。
-
アーム(a)
-
まず一つ目のアームは下の写真の様に一つずつ掴めるように設計しました。また、このアームは向きが90℃以上回転するようになっており、機体の中にも収納できるようになっています。

-
機体の中に挿入した後も上下方向にひもを使って移動できるようになっています。
-
まず一つ目のアームは下の写真の様に一つずつ掴めるように設計しました。また、このアームは向きが90℃以上回転するようになっており、機体の中にも収納できるようになっています。
-
アーム(b)
-
もう一つのアームは、正三角形に並んだ養生テープをそのままつかもうというコンセプトのもと作りました。

-
もう一つのアームは、正三角形に並んだ養生テープをそのままつかもうというコンセプトのもと作りました。
そして、僕らの機体にはタスク達成(勝つために必要な項目)には必要のない、ちょっとした工夫があります。
私たちの機体は足回りと上物をネジを10本程はずすだけで分けることができます。
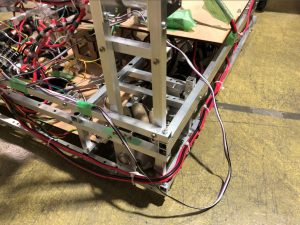
これは上物と足回りのどちらかのみ直したいときに、もう一方では練習できるようにしたかったのでこのような機構になりました。
ただ、ロボコンにはこういう無駄はない方がいいのだとか。。。
みんなは気を付けよう!
まとめ
ロボコンは製作するのに時間&労力&金はかかるけど、でも面白い!
そして、なによりロボコンは何もNHKロボコンだけじゃない!
NHKロボコンは1年単位で行われるからまよってて入りにくいという人は、ぜひともF3RCや関東春ロボコンという大会までの期間が短い大会もあるので、
まずはF3RCなどに挑戦してみてください。
どうせ遊んでいてもお金も時間も無くなるんだし、一度ロボコンをやってみよう!
そして面白かったら、Maquinistaにはいって、NHKロボコンをやろう!!
(新歓ブログMaquinista紹介ページ)
(※注意:あくまで個人の感想です。)
最後に
今日が新歓ブログリレー最後の記事です。
今までの記事の中で皆さんが迷っている皆さんの今後の方針に役立つものはありましたか?
もし役立つものがあり、なおかつ今後のモチベーションになるものがあったのであればうれしい限りです。
今度はぜひともロ技研部員として会いましょう。
それではみなさんお元気で
(最近作っている机)
