2. タイヤが丸くないラジコンカーの秘密
答え合わせです.
例えば,楕円のタイヤが一定の回転速度で転がったとすると,
このように上下に揺れるわ進む速度も一定じゃないわで乗り心地はきっと最悪です.
なんとかして歯車だけで
①上下運動の相殺
②進む速度変動の相殺
ができればいいですね.
まず②についてですが,これは地面と接している点の位置が左右に移動しているということと,その点におけるタイヤの曲率が変わることが原因で発生しています.
これだけであれば,非円形歯車の設計理論(2年前の記事)を使うことで好きな回転速度変動に設定できますが,今回は①も解決しなければなりません.はてどうしたものか.
それでは,詳しい設計理論の話は後にして,最終的な結果をまず見てみましょう.
お分かりいただけたでしょうか?
そう,青い歯車は上下できるようになっており,歯車が回ることで自ら歯車同士の軸間距離を変化させているのです.この青い歯車の上下の動きが,丸くないタイヤによって生じてしまう上下運動を打ち消せれば無事①も達成というわけです.
なお,歯車同士は動画のように常に噛み合っていてもらわないと困るので,ロボットの方には軸同士が引き合うように引っ張りばねを仕込んでおります.
さて,それでは軸間距離が変動する非円形歯車の設計理論について説明します!
3. 軸間距離変動非円形歯車設計理論
なんだか中国語か?って感じの章タイトルになってしまいましたが,重要な章です.
いきなり歯がつくと大変なので,まずは滑りなく転がる摩擦車として今回のケースをモデルにしてみます.
下の図のように原動歯車の回転中心点 O_1 は XY 座標系の原点に固定されており,従動歯車の回転中心点 O_2 は X 軸上を軸間距離が a(\phi_1) となるように動くとします.
なお, \phi_1 , \phi_2 はの各歯車の回転量を表します.
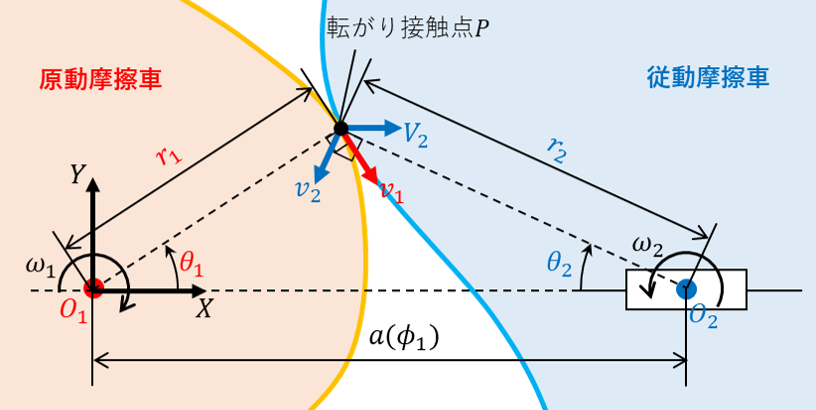
2年前の記事でも述べましたが,常に転がり接触を保つためには以下の条件が必要です.
(1) 運動中,物体同士が接触している点 P が常に存在する
(2) 接触点 P における各物体の速度ベクトルは等しい
今回は従動摩擦車自体が速度 {\bf V_2} を持っているため,(2)の条件を満たすためには P は線分 O_1O_2 上にあるとは限りません.なので半径 r_1 , r_2 の他に新たに \theta_1 , \theta_2 という変数を用意しました.
まずは(1)の条件より, X, Y 座標が一致していなければならず,
r_1\cos \theta_1+r_2\cos \theta_2=a(\phi_1) ,
r_1\sin \theta_1=r_2\sin \theta_2
が得られます.
各軸回転による接触点の各摩擦車の速さは v_1=r_1\omega_1 , v_2=r_2\omega_2 であり,軸間距離変動による従動摩擦車の速さは V_2=da(\phi_1)/dt である.したがって(2)の条件より, X, Y 軸方向の速度の和が一致していなければならず,
r_1\omega_1\sin \theta_1=-r_2\omega_2\sin \theta_2+\frac{da(\phi_1)}{dt} ,
r_1\omega_1\cos \theta_1=r_2\omega_2\cos \theta_2
が得られます.ここで従動側への角速度比関数を f(\phi_1)(=d\phi_2/d\phi_1) とすると, f(\phi_1)=\omega_2/\omega_1 , \frac{da(\phi_1)}{dt}/\omega_1=da(\phi_1)/d\phi_1 となるので,
r_1\sin \theta_1+f(\phi_1)r_2\sin \theta_2=\frac{da(\phi_1)}{d\phi_1} ,
r_1\cos \theta_1=f(\phi_1)r_2\cos \theta_2
と書き換えることができます.以上の式より,
r_1=\frac{\sqrt{f(\phi_1)^2a(\phi_1)^2+(da(\phi_1)/d\phi_1)^2}}{1+f(\phi_1)} , \tan \theta_1=\frac{da(\phi_1)/d\phi_1}{f(\phi_1)a(\phi_1)} ,
r_2=\frac{\sqrt{a(\phi_1)^2+(da(\phi_1)/d\phi_1)^2}}{1+f(\phi_1)} , \tan \theta_2=\frac{da(\phi_1)/d\phi_1}{a(\phi_1)}
と求まります.もちろん, V_2=0 とすると2年前の記事の結果としっかり一致します.
あとは a(\phi_1) と f(\phi_1) さえ定めれば摩擦車の外形が求まることになります.
今回の場合,①②の運動相殺が行えるように決めてあげればいいわけです.この計算はめっちゃ煩雑なのでここでは割愛します.
摩擦車の外形が決まれば,以前の僕の方法で歯をつけていくことができ,無事歯車が完成します.
やったね!
この理論を使えば,タイヤの形が変わっても,ある程度は対応できます.
例えば,丸は丸でも,中心がずれた丸のタイヤでも,
このとおり!
