こんにちは,やまもとです.
最近4足歩行ロボットの話題をよく耳にします.
様々な人たちが4足歩行に関する研究を行っており,ボストンダイナミクス社の「Spot」は既に建築現場で勤務されているとのことです.これからまさに馬車馬のごとく働かせられるのでしょう,お勤めご苦労様です.
そんなHotな4足歩行ロボットですが,開発は大学や民間企業が行っているものが殆ど.もちろんヨドバシカメラには売っておらず,大学生が個人的な趣味で気軽に4足歩行ロボットを飼うことはできないようです.いや,aiboなら売ってるか…?
いかにせよ4足歩行ロボットをいろいろいじって遊ぶには機体から自分で作るしかないようです.うん,作るか.
ということで大学の研究にも追われながら設計を始めました.本記事ではその機械周りの一部を紹介します.
アクチュエーター
歩行ロボットの脚には自重を支えつつ運動を生み出すためのパワフルなアクチュエーターを採用したいところです.
今回使うのは最大出力900W越えのブラシレスモーター.

後輩にそれを話したら「電子レンジじゃんwwww」って言われました.電子レンジがクルクル回ります.大丈夫かバッテリーくん…
このモーターに自作のサイクロ減速機[1]を搭載してモーターモジュールとします.
このモーターモジュールには簡易的な2相エンコーダー[2]も搭載されています.
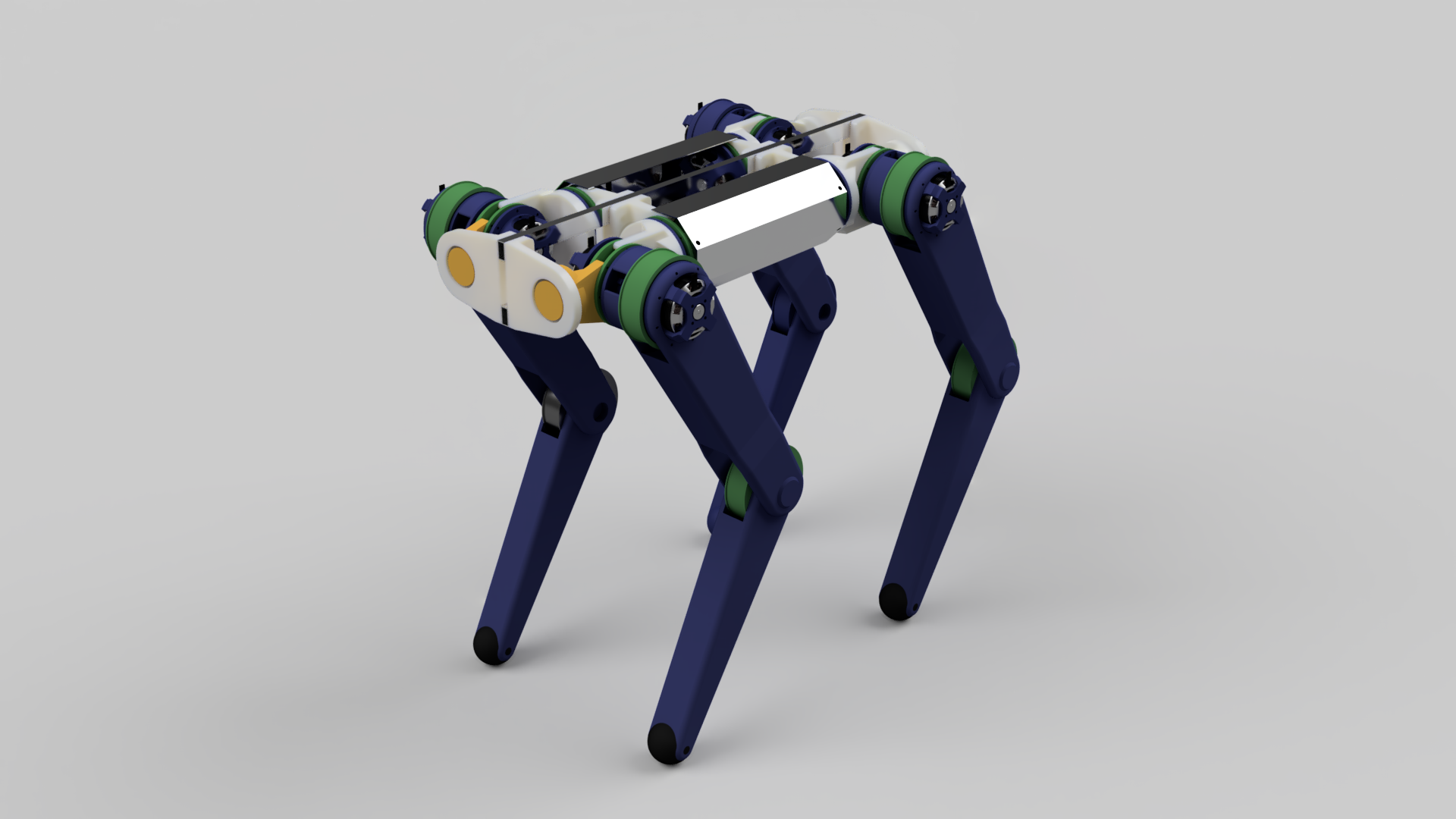
機体
このモーターユニットを使って4足歩行ロボットを作ります.1脚3自由度,合計12自由度になるので結構大がかりな工作です.全長600mm,全幅400mm,全高600mmのだいたい大型犬サイズのロボットです.重量は10㎏程度に収まるでしょうか.
モーターユニットを12個用意するのは大変ですが,自作にした分1ユニット1万円以下で作成できそうなので金欠大学生にはまだ趣味の範囲の出費で抑えられそうです.
続く…
[1][2] そのうち記事書きます

楽しみにみてます
進捗はいかがですか?