この記事はロ技研秋のブログリレー2020の記事です。
こんにちは。18-Thunderです。ロ技研秋のブログリレー2020ということで自分の所属するアクア研について書いていきます。
アクア研とは
知らない人もいると思うので研究室について紹介します。
名前にもあるとおり、水や流体に関することを対象にします。
水中ロボットだったり水上船を作ったりしてます。

ここ数年は例年夏に開催される水中ロボットコンベンションへの参加を目標にしています。
特定のタスクがあるわけでもないので、自由に技術を生かしていきます。
水中の自動機を目指して作ることが多いです。
水中ということで、地上で元気に動く機体も水没させれば(おそらく)お亡くなりになると思います。水中で元気に動かすために、本研究室では以下のようなことをしています。
- 回路などの防水
基板やマイコン、バッテリーなど、すべての電子部品は水が入らないように処理します。
お弁当箱や塩ビ管を使って密閉することが多いです。(基板をコーティングして直付けしたこともあるが)
右上がお弁当箱。マイコンや基盤が入っている。 左や下が塩ビ管。左はバッテリー、下はモーターが入っている。 配線のためのケーブルやメンテナンス時の開閉に気を付けます。
浸水センサーや緊急停止スイッチもあります。 - モータの防水
モーターは防水のほかに回転軸をどうするかを考えなければなりません。
大きく分けて2つの方法があり、軸を油などで覆う方法と非接触で回す方法です。
本研究室では磁石による非接触式が多いです。 - センサー
手動機なら人が見てやればいいですが、自動機の場合はセンサーで外部の情報を得る必要があります。
超音波センサーやカメラ、加速度センサー、ジャイロセンサーを使います。
ブイタッチやゲートくぐりなどのタスクが多いため、カメラで目標を認識することが多いです。
減衰の関係で画像だけではなく、深度を測るRealSense(出来た)や減衰の少ない音波を用いたソナー(実験中)で補助します。
カメラの水中画像 真ん中に青い風船があり、上はより水深が深い領域になる 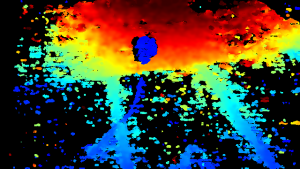
深度画像 風船の部分が青(近い)に、水深が深い部分が赤(遠い)になっている 制御にも絡んできますが、壁や床が常に使えるわけではないので真面目に自己位置を取ろうとすると大変です。
- 機体設計
船や水底走行機ならともかく、水中ロボットは三次元的に動くため、いろいろ考えることがあります。
例えば、機体の重心は下に、浮力と重力が釣り合うようにして、静止状態が安定になるようにすること、目的に合うスラスターの位置および個数を決めることがあります。
水の抵抗の影響を考え、進行方向に垂直な面を減らしたり、横や上から見たときに滑らかな楕円形なるようにしたりもします。
今年度の活動について
コロナの関係で前期は機体製作が難しく、構想、設計や家でできる作業をしていました。
水中ロボコンが12月に延期になったので、現在はそれを目指して機体制作に取り組んでいます。
今年は2チーム参加します。結果が出次第ブログにも報告します。