この記事はrogy Advent Calender 2020 13日目の記事です.
こんにちは、15の谷です。
昨日12月12日に開催された「第11回 ROBO-剣(アーム型)」に参加しましたので、その報告と出場ロボットの紹介をします。チーム「ロギ剣」として、3人で参加いたしました。
まず結果として、私達はこの大会で優勝することができました。
加えて、制御技術賞、近藤科学賞も受賞することができました。
初めての出場ではありましたが、私達のロボットが活躍できたこと、またその技術を評価していただけたこと、大変嬉しく思います。
応援してくださった皆様、大会に関わる運営の皆様、選手の皆様に感謝いたします。ありがとうございました。
今回の記事では大会の概要、そして「機構編」としてロボットのメカ部分について紹介させていただきます。
明日明後日は各担当者による制御、画像処理についての記事を予定しています。
ROBO-剣とは
ROBO-剣とは最大7軸のロボットアームによる剣道大会です。例年は2台のロボットを対面させ、面、胴、小手、突きの4つの決め技を打ち合う競技となっています。しかし今年はオンラインでの開催となり、例年とは異なるルールのもと大会が開催されました。
以下、第11回のルールについて簡単に説明します。
ロボットの仕様
ロボットは完全自律であることが規定されており、遠隔操縦による動作は認められていません。ロボットの軸数は最大7軸、角部の寸法にも幾つかの制限が存在します。ロボット外部にはPCを接続することが認められていますが、カメラやセンサなどは全てロボット本体に搭載する必要があります。
詳細な競技規則はこちら。
試合ルール
今年はオンラインでの開催だったため、対戦相手としてダミーロボットが使用されました。これは下図に示す、ペットボトルの指定された位置に面、胴、小手に対応する赤、青、黄のマーカーを取り付けたものです。

このダミーロボットに対する30秒間での有効打突数を競います。対戦相手のチームと30秒間ずつの打突を行い、その数が多かった方が1本勝ちとなります。試合は3本勝負とし、2本先勝で勝利となります。有効打突数はビデオ会議を通し審判によりカウントされます。
製作したロボット
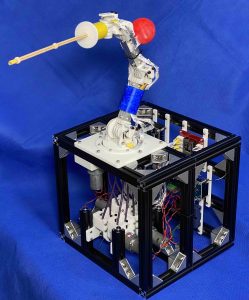
こちらが私達の製作したロボット「Gano剣」です。(たまたまロボット名とアカウント名が被ってしまったGanoken君にはエントリー時に許可を頂いております。ありがとうございます。)
機構面で他チームと大きく異なるのはワイヤーによる駆動系を採用していることです。この競技ではスピードが大事になると考えたため、アームにはモータを搭載せず大幅な軽量化を行おうというコンセプトのもと設計しました。
また今年はこのような状況により部室や大学設備を使用した部品加工がほとんどできない状況だったため、ほぼ全ての部品を自宅の3Dプリンタと既製品の機械要素だけで製作できるような設計としました。
機構説明
アームには下図のようにワイヤーが張られており、ワイヤーを土台部分に固定したモータで引っ張ることでアームの駆動を行います。ヨー軸についてのみ、ワイヤーは使用せずに駆動しています。
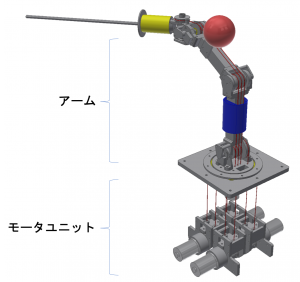
ロボットの駆動系は土台に取り付けられたモータユニットと、実際に試合動作を行うアーム部の大きく2つに分かれており、この2ユニットが下図のようにチューブで連結されています。

このチューブ内にワイヤーを通すことで、モータユニットからアームへの動力伝達をしつつアームのヨー軸回転をさせることが可能となっています。
モータユニット
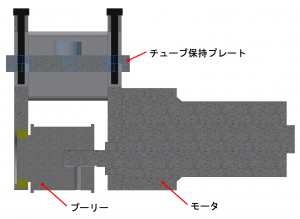
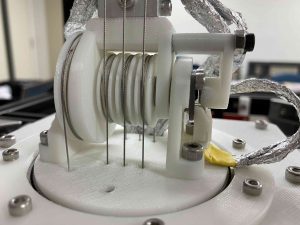
ワイヤーの巻き取り、繰り出しを行うモータユニットについて説明します。モータユニットは下図のような構造をしています。
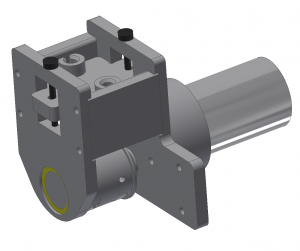
モータにはタミヤギヤードモータ380K75(RS-380PH + K75)を使用しました。このユニットではワイヤーの巻き取りだけでなく、張力調整も可能となっています。チューブを取り付けているプレートにはナイロンナットが埋め込まれており、ネジによりプレート位置を変えることでワイヤーの経路長が変化します。ワイヤーを張った状態で経路長を変更することで張力の調整が行えるような機構となっています。
関節構造
アームの関節にはワイヤーと共に回転する駆動プーリーと更に先の関節へワイヤーを運ぶ中継プーリーの2種類が取り付けられています。下図は一番根本のピッチ軸構造であり、その軸の駆動プーリー1つと更に先端3軸のための中継プーリー3つを搭載しています。
このように実際に駆動したい関節より前の関節全てにワイヤーを中継しているため、動作の干渉という問題が生じます。
例えば下のGIF画像では一番根本のピッチ軸を手で動かしているのですが、その次の軸もそれにつられるように回転してしまっています。今回は全てのプーリー直径を等しくしたため、平行リンクと同様な動きです。

この干渉により目的の姿勢にアームを制御することが難しくなってしまっているのですが、制御担当が頑張ってくれました。(詳しくは12月15日の記事をご覧ください。)
最も先端の関節については回転方向が異なるため、小さなプーリーを介し、ワイヤーを取り回しました。

各関節にはマグネットエンコーダが取り付けられており、関節角の取得も可能となっています。
ヨー軸についてはアーム土台に切った歯車をモータで直接駆動する方式としています。エンコーダも同様な取り付けをしています。

以下ちょっとした工夫など
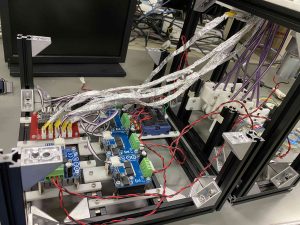
回路置場との分離
本機体では回路置場を簡単に分離できるような構成としました。これにより、機械、回路ともにメンテナンス性能が向上しました。またロボット本体の組み立てが遅くなってしまいましたが(ごめんなさい)、回路だけ先に組んでおいてもらうこともできました。
カメラの固定
カメラの固定部にはヨー角、ピッチ角を連続的に調整することができるような土台を搭載しました。画像処理のことはよく分かりませんが、カメラの向きを簡単に調整できるので良かったのではないかと思います。(画像処理について、詳しくは12月14日の記事をご覧ください。)

ダミーロボットの頭部
今回の試合相手となったダミーロボットは、ビデオ会議システムにより有効打突の判定が行われるため、技が決まった際にビデオ越しでも分かりやすくする必要があります。その工夫として、ダミーロボットの頭部はバネに括り付けたワイヤーで引っ張ることにより取り付けました。これにより竹刀が面に当たるとバネのお陰でゆらゆらと揺れてくれます。ビデオでの判定に貢献してくれていたのではないかと思います。

最後に
私達のロボットはまだまだより速く正確な動作ができると期待しています。機構面もよりアップデートを重ね、来年の大会も良い結果が残せるよう頑張りたいです。
今回はオンライン大会という形になってしまいましたが、来年ロボット同士で試合ができることを楽しみにしています。
明日はnomotech君による記事です。
この記事の続きになる予定なのでぜひご覧ください。
最後までお付き合い頂きありがとうございました!

遅ればせながらKuramae Journal (東工大の同窓会誌)で知りました。グッジョブです!