
2023年7月12日(水)にみなとみらいの日本丸となりのシーカヤックパークで行われた海洋ロボット夜の祭典にアクア研が出場し、優勝しました!
昨年度製作していたKurione2に加え、今年度複製したKurione3の2機体を使用して演技を行いました。

大会概要
7/8-14にて横浜で行われていた制御系の国際会議 IFAC (International Federation of Automatic Control) World Congress 2023 内のイベントとして、海洋ロボット夜の祭典が開かれました。学会の開会式には天皇皇后両陛下もご臨席されていたそうです。今回はそのような中、水中ロボットたちで横浜の海を照らそうということで行われました。東工大のチームのほかに、東大や複数の企業のチームが参加しました。
機体の紹介
メインボディ
アルミ管に、アルミの板をCNCで切削したフランジをロウ付けして作り上げたものがメインボディです。中には回路・マイコンやバッテリーが入ってます。
メインボディからは、基板を利用した防水の蓋を通して、コードをはやしています。
動力
自作アジマススラスタ3基を搭載しています。
塩ビ管や3Dプリンターパーツにより低コスト化をはかっています。
海の波風に対抗するため各々500Wほどの出力で動かしています。
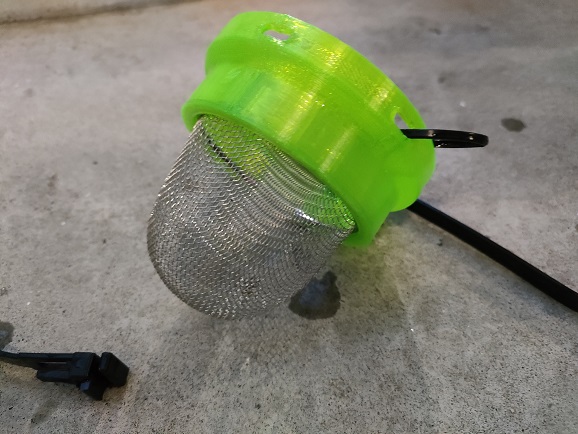
今回の会場は泥やごみ、クラゲがたくさん見受けられたため、それらを吸い込んでプロペラや歯車が壊れないよう、みそこしなどを使って吸い込み防止の機構も加えました。
(前日に作り上げました。大変だった~。)
イルミネーション
噴水2基にパワーLED2基、高輝度テープLED2本を搭載しました。
噴水
噴水ではアクア研でも開発が続いている技術マグネットカップリングによって防水しながら動力を伝達しています。
100均のマグネットでここまで上がりました。
まだまだ力学的には本気ではないとのこと。
こちらも直前まで水に全部没すると全然吹き上がらないという問題があったりしました。
1週間前に設置場所を変更し、空気を混ぜることで吹き上がりました。
噴水も奥が深そうです。
LED
今回はパフォーマンスをするとのことで、高輝度LEDを使いました。
パワーLEDは近くで直視すると目が痛くなります。。。
演出
このブログの筆者は演出をメインで担当しました。
Matlabを使って音源を聞きながら、操作したいタイミングを時間計測し、計測した時刻200個に対し、コマンドを手打ちしていきました。
その計測した時刻に合わせて20種類のコマンドをどうしたいかcsvファイルに起こして埋めていきます。
実際動かすときは、ROS2のプログラムで音楽を流しながら、それと同期してcsvを読み込み演技しています。
20種類のコマンド×2機体×200 = 8000マス埋めました。
浮力材
浮力材にはたくさんの発泡スチロールを用いました。
ほとんどの発泡スチロールを養生テープで覆うことで形が変わったりはずれたりすることを防いでいます。
今回は水上で動かすために、ましましの浮力を与えています。
大会準備
自分たちの機体の整備はもちろんのことですが、演技イベントならではのさまざまなことがありました。
会場視察
会場を把握しないと演技なんてできやしないということで、みんなで1カ月ほど前に横浜散策しながら見てきました。
カヌーポロ楽しそうだった。
クラゲがいっぱい浮いていること、観客が高さあるところから眺めそうなことを把握しました。
会場のサイズが今まで動いたことないほどでかいことも把握。
演技練習
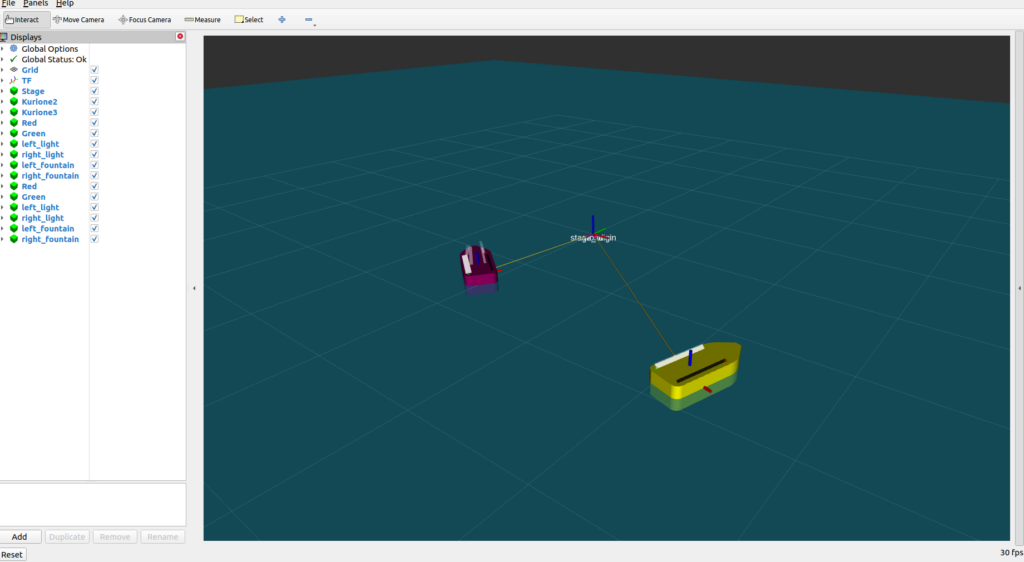
そんじょそこらにこの広さの水中ロボットを潜らせて良い安全なスペースなどないということで、シュミレーション環境を構築し、練習しました。
ロボットを動かすプログラムはROS2をフレームワークとして利用しています。
できたら、シミュレーションと実機両方同時に動かしてROS2のメリットを利用したいねってことで、ROS2のRviz2を利用して構築しました。
(でもバージョンが違くて、シミュレーションと実機の連携はできなかったけれども。。。)
演出担当がイメージがわかないというので、装飾に関しても、シミュレーションに表示できるようにしました。
Logicoolのゲームパッド繋いで本番さながら練習しました。
シミュレーションはすんなり動くけど、実機はそうはいかない。でもやりたいことを最大限練習しとくのって大事ですね。
会場の装飾準備
LEDテープライトで会場をイルミネーションしときたいとのことで、設計図をいただき、それをもとに製作しました。
11mものチューブを通すのはなかなか至難の業でした。
会場設営
まだまだマイナーな海洋ロボット。
スタッフなんて多くなく、(予算も少なく、)自分たちも協力しながら設営しました。
ロ技研からもたくさん手伝いにきてもらいました。
感謝です。
本番
リハの直前にKurione2の噴水が不調(危険な状態)に。Kurione2 の噴水をとりやめました。
さらに、音源が操縦者席からは流せないとのことで、急遽音源に知る人ぞしる、ESCの起動時のモーターによって繰り出されるあの音をいれました。
録音して、ローパスフィルタで雑音除去していれました。
あの音でタイミングを見計らって、動作の同期をしました。
そして本番。
Kurione3の様子がおかしい。。。
Rebootだーーー。
説明でなんとかつないでもらいました。
なんとRebootでKurione3が復活!すごい!
なんとか演技をしました。
当日は800人近くに見ていただいたみたい。
噴水が上がった瞬間、おおーという雰囲気を感じました。
LEDのぴかぴかも楽しんでもらったようで、ときどき口笛も聞こえてうれしかったです。
無事、シミュレーションと比べては50パーセントかもしれませんが、10分間最大限できることやってKurioneたちは帰ってきてくれました。
最後、最優秀パフォーマンス賞をいただきました。
アクア研初の優勝です!

お手伝いいっぱいきてくれた
次はどのロボコンに挑むのか。。。!
ここまでお読みいただきありがとうございました
