初めに
みなさんこんにちは。
皆さんは忙しいですか?私は夏休みまでは忙しかったです。
さて、私はよく、腕がもう一本増えないかなぁと感じるのですが、世の中にある義手はそれほど使い勝手が良さそうではないし、高いです。また、個人的に思うのは、単に既存の手を置き換えるというのではなく増やせる方が非常に便利であることは疑いようがありませんが、存外そういったものを作ろうという人は少ないと感じます。なんか残念です。そこで、とりあえず自分で使ってみたいと思えるようなロボットハンドを制作するという点にのみフォーカスしてハードウェアを作ってみようと考えました
既存のものと比べて
下の画像を見てください
これは昨年度の私が文化祭で展示したじゃんけんを行うロボットハンドです。
できてんじゃんと思ってしまわれた方もいると思いますが、色々問題があるのです。
問題点
- ワイヤーの整備が行いづらい
- リンク比がそれほど良くないために球体などの立体に対して把持効果が弱い
- パーツの換装が小分けにならない
- オープンソースのものをちょっといじった程度であるために設計変更が容易でない
- 手元に設計データがないので改良すら無理
- 自重を補償しないために手首の角度と対応する補正値が乗ってしまう
- 制御可能な項目が少ない
- ワイヤーのテンション調整ができない
このうち少なくとも1~5を改善し、その他の項目を改良するために自分で設計をし直すことにしました。
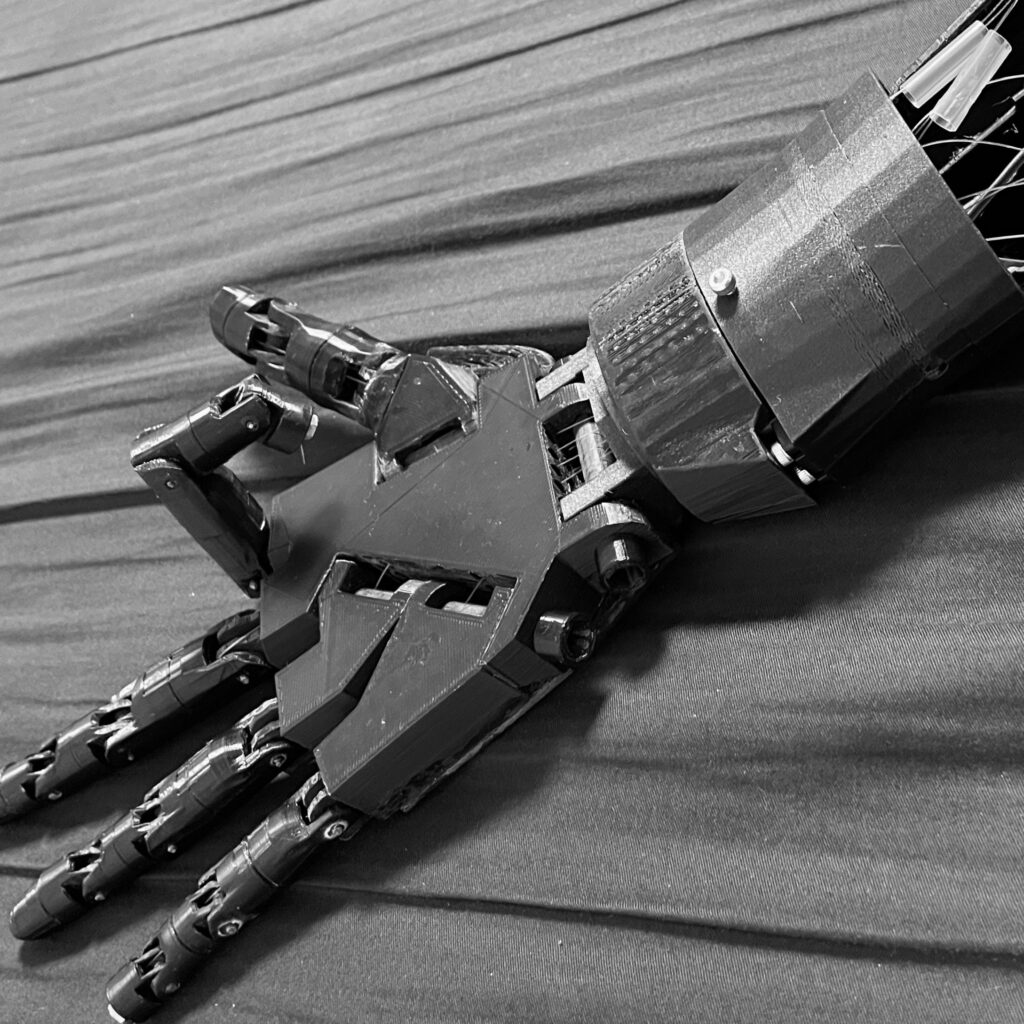
できたもの

これができたものです。え?しょぼいし指しかないじゃんって?
間に合わなかったのですね…
こんな反応が聞こえてきそうなので一つ釈明をしておくと、この、指さえ作れば、去年のものと合体するだけで目的を遂げられるんですよね
まあ作りたいと思って設計まではしたので完全に言い訳ですが
ここまで設計しておいて何故作らなかったの?って言われそうですが、単にまだいじり足りない部分があるだけです。
悲しいな
指の可動域


駆動域は見ての通りで、中に駆動域外への動きに干渉させるように仕切りがあります。完成品と色が違うのは、まあ仕様です。
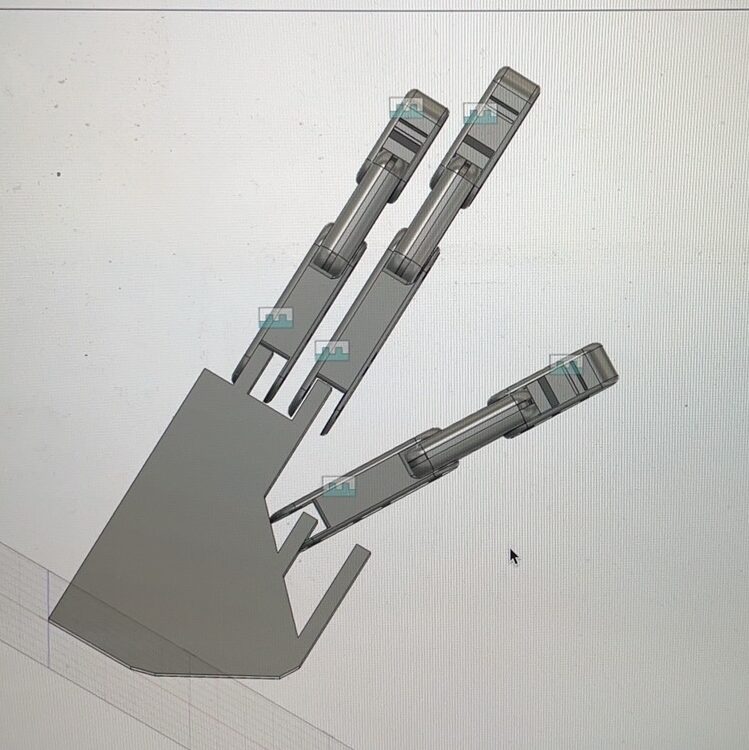
大きさは下の画像の通りです。私の手のサイズに外形が合うように設計されています。
この仕様上、問題はあるのですが、一旦はこれでいいと思っています。

まとめ
なんか指だけ作ったことを記事にしてみて、なぜ数ヶ月ひたすら指しか作らなかったのか?と感じざるを得ませんが、まあ、しょうがないことかもしれません。
おまけ
案の定未完成のものをプロヂュースする記事を作ってしまったし、設計手法を具体的に書くべきとも思えなかったので、書いてみて微妙すぎる記事になってしまってすみません。
書いたという点を評価してほしいなぁと感じています。
