2023年7月12日(水)にみなとみらいの日本丸となりのシーカヤックパークで行われた海洋ロボット夜の祭典にアクア研が出場し、優勝しました!
昨年度製作していたKurione2に加え、今年度複製したKurione3の2機体を使用して演技を行いました。

東京工業大学の公認サークル「ロボット技術研究会」のブログです。 当サークルの日々の活動の様子を皆さんにお伝えしていきます。たくさんの人に気軽に読んでもらえると嬉しいです。

2023年7月12日(水)にみなとみらいの日本丸となりのシーカヤックパークで行われた海洋ロボット夜の祭典にアクア研が出場し、優勝しました!
昨年度製作していたKurione2に加え、今年度複製したKurione3の2機体を使用して演技を行いました。
初めまして、ブログ初投稿の19-Mizukamiです。アクア研に所属しています。今回はアルミのロウ付け加工とそれを用いた制作物について紹介します。
この記事はrogy Advent Calender 2022の18日目の記事です。

こんにちは。アクア研の20-yoです。
アクア研は8/27, 28で、2つの水中ロボコンに参加しました。
この記事は、そのうち、水中ロボットコンベンションinJAMSTEC 2022に参加した、turtlrasプロジェクトの進捗報告です。
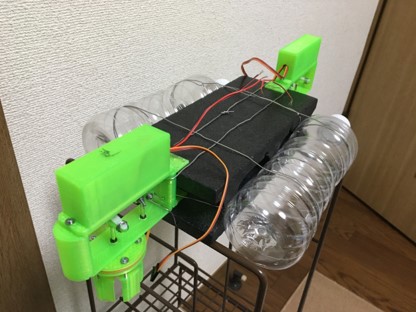
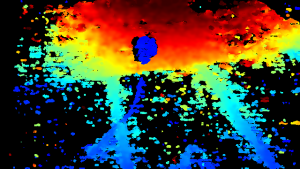
turtlrasプロジェクトは、今まで作成してきたアクア研の機体たちを水中から撮影する群ロボットをつくりたい、を動機に始めています。
理想としては、図の感じです。
被写体はiwatobiです。
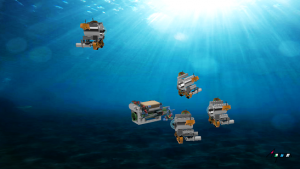
“turtlras プロジェクト 進捗報告” の続きを読む
こんにちは,Cheese所属の19-teruruです.Cheeseの紹介をさせていただきます.
新歓あるいはHCDのブログリレーで紹介をするつもりでしたが,遅くなってしまいました…
Cheeseはロ技研の研究室の1つで,マイクロマウスの製作チームです.マイクロマウスは,自律的に迷路を走ってゴールを目指すロボットを指します.
こんにちは!Aqua研所属の20-yoです。
せっかく工業大学に入ったし、ものつくりしたい、ロボット作りたい、という思いの人とたくさん会うなー、と思う今日この頃です。
ここでは、ロボット初めてという人や、水に関連するロボットに興味がある人におすすめしている、Aqua研で製作している、水上ロボットキット -オムニボート- について紹介します。若葉祭でも展示していました。見に来てくださった皆様、ありがとうございます!まだ見てないという人は、↓をぜひ!
“水上ロボット体験会 参加者募集中!” の続きを読む
この記事はロ技研秋のブログリレー2020の記事です。
こんにちは。18-Thunderです。ロ技研秋のブログリレー2020ということで自分の所属するアクア研について書いていきます。
知らない人もいると思うので研究室について紹介します。
名前にもあるとおり、水や流体に関することを対象にします。
水中ロボットだったり水上船を作ったりしてます。

ここ数年は例年夏に開催される水中ロボットコンベンションへの参加を目標にしています。
特定のタスクがあるわけでもないので、自由に技術を生かしていきます。
水中の自動機を目指して作ることが多いです。
水中ということで、地上で元気に動く機体も水没させれば(おそらく)お亡くなりになると思います。水中で元気に動かすために、本研究室では以下のようなことをしています。

配線のためのケーブルやメンテナンス時の開閉に気を付けます。
浸水センサーや緊急停止スイッチもあります。

制御にも絡んできますが、壁や床が常に使えるわけではないので真面目に自己位置を取ろうとすると大変です。
コロナの関係で前期は機体製作が難しく、構想、設計や家でできる作業をしていました。
水中ロボコンが12月に延期になったので、現在はそれを目指して機体制作に取り組んでいます。
今年は2チーム参加します。結果が出次第ブログにも報告します。
こんにちは。Maquinistaで広報を担当している16のMassaです。
こちらはrogy Advent Calendar 2018の23日目の記事になります。
Maquinistaでは来年5月26日に開催されるNHK学生ロボコン2019に向けて日々活動しています。特に現在は1次ビデオ審査を目前に控えているため、練習や調整を行っています。
“Maquinistaの2018年を振り返る” の続きを読む
こんにちは。たのしいロボット帝国、3代目国王の15 argです。
今日はたのしいロボット帝国の紹介をします。
この記事は新歓ブログリレー24日目の記事です。
“たのしいロボット帝国の紹介” の続きを読む
おはようございます こんにちは こんばんは. 16のだんごです.
この記事は新歓ブログリレー22日目の記事です.
今日は私が代表をやっている研究室, Cheeseの紹介をしようと思います.
