この記事は、 rogy Advent Calendar 2019 の18日目の記事です。
こんにちは。17のたっち(@touch_sukem)です。
タイトルの通りです。
集まって上映会をするよりもっと手軽に人とアニメを見られるようにしたくないですか?
今回はそのために作ったfirefoxのアドオンを紹介します。
東京工業大学の公認サークル「ロボット技術研究会」のブログです。 当サークルの日々の活動の様子を皆さんにお伝えしていきます。たくさんの人に気軽に読んでもらえると嬉しいです。
分類してほしい
この記事は、 rogy Advent Calendar 2019 の18日目の記事です。
こんにちは。17のたっち(@touch_sukem)です。
タイトルの通りです。
集まって上映会をするよりもっと手軽に人とアニメを見られるようにしたくないですか?
今回はそのために作ったfirefoxのアドオンを紹介します。
この記事はrogy Advent Calendar 2019 17日目の記事です.
こんにちは.17のpilafです.
12/15(日)に第三回Cheese杯を開催した話を書きます.
cheeseについてはこことかを参照
毎年12月に,他団体の方たちを招いて学内でマイクロマウスのプチ大会を開催しています.
開催は三度目となり,今年も大勢の方に参加していただきました.
以下は当日の写真・ツイートです.
鋭意準備中… pic.twitter.com/oPOjhhHaOa
— Cheese (@ssr_cheese) December 15, 2019
本日は他大学の方も招いてマイクロマウスのプチ大会、Cheese杯を開いてます!この後はクラシック競技に続いてハーフサイズ競技です! pic.twitter.com/3VzkXzOHJb
— Cheese (@ssr_cheese) December 15, 2019
今年も無事にCheese杯が終えられました!技術交流会などを通して得たモチベーションや知見をもとに来年の大会に向けて頑張りましょう!運営や手伝いをしてくれた参加者の皆様、お疲れ様でした! pic.twitter.com/TCje0CGbPp
— Cheese (@ssr_cheese) December 15, 2019
そして,この度晴れて組長の座を退くことに成功しました.一年間ありがとうございました.
次期組長は18のHitomoshi君です.彼と彼の作るマイクロマウスにご期待下さい.
rogy Advent Calendar 2019,明日は17のたっち君の記事です.お楽しみに!
この記事はrogy Advent Calendar 2019の14日目の記事です。
ごきげんよう.17の信風(@kaze_0kudasai)です.
今日は私の初めての電子工作のお話です.(はんだ付け講習会と講義以外で基板触ってないし,初めてでいいよね…)
というわけで,このブログには間違いを多分に含みます.ネタブログとしてお読みください.
さて,初めて電子工作をするわけですが.初めてといえども,どうせ作るなら楽しそうなものがいいよねということで,講義で作るのに失敗したHブリッジ(フルブリッジ)に挑戦してみました.
特徴はこんな感じです.
マイコンから送る信号線を3つにしたのは,配線少ない方がかっこよさそうマイコンから送れる信号に限りがあることと,論理回路を作ってみたくなったからです.また,NP型にしたのは,バージョン1でN型を作ったからだったと思います.
今回作った回路は下の図のような回路になってます.
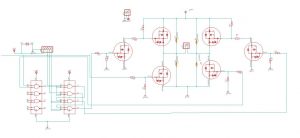
基板にするとこんな感じです.

この回路は実際にはGNDが共有されていない,動作確認用のLEDが存在しない等の問題点はありますが,改善してから基盤切削してみたいです.
最後に,動いた動画がこちらです.
テスト期間に隣で成長していたHブリッジ先輩 pic.twitter.com/EVkueKEvKh
— 信風 (@kaze_0kudasai) December 14, 2019
以上,初めての電子工作でした.
基板切削をしたら,また報告するかもしれません.
明日はらりおさんの「修論? まだ早い」です.明日のrogy Advent Calendar 2019もお楽しみに~.
この記事は,rogy Advent Calendar 2019 の10日目の記事です.
はじめまして.ふくふく(@fkfk21_18) です.
今回は,windows7でH8マイコンを使用する環境構築について書きたいと思います.
(´・ω`・)エッ?
我らが東工大の工学院システム制御系は,200番台の(一般に2年生が履修する)講義として,組込システム基礎というものがあります.この講義では,VS-WRC003LV というH8マイコンを搭載したマイコンボードを用いてマイコンを使おうっ!といった内容が半分を占めています.
H8マイコンの環境の構築と動作確認が主な目的でした.この講義では講義室に備えているPC(Windows8.1)を用いて講義を受けることもできるのですが,PC重すぎてやってられないと講義開始10分で見切りをつけたので,自分のPC(Windows10)内に環境を入れますかぁと思ったわけです.
マイコンとのシリアル通信を行う際に使用するHtermという今回使用するマイコンボードに特化した(?)ソフトウェアがあるのですが
僕の環境でなぜか接続できない
デバイスマネージャーからCOMポートで認識しているというのは確認でき,かつ,teratermを使えばシリアル通信できることも確認できた.なぜなんだ
ちなみにこのHterm上のメニューバーでhelpってやつを選択したらシリアル通信で”?”を送って結果が送られてくるとかいう実際に何をしているのか見えにくい仕様なので(やっていることは推測できるのですが),誰かに「ねえ,このhelpってやつ,何を送ってた?」とか毎度毎度教えてもらわないとteratermでは戦えません(ちなみに初回はteratermで戦いきりました).
さすがに迷惑ですね
ちなみに周りのwindows10勢は「普通に動くで」といった感じで平然と課題を進めています.
意味が分からんっ!!!!!
というかこのUI,一世紀ぐらい古そうな見た目してるなぁと思い,調べてみたところ...このHterm,なんかwindowsXPで更新が終了しているみたい…
たくさんのシステム制御民が組込最高~~って言ってる意味がなんとなく分かってきましたね
けど,現状XPは現状microsoftの公式から入手する方法はなさそう(?)なのでwindows7使ってみるかぁという思いになりました
なんか日本の半数以上の企業が使ってるらしいし?
しかし,自分のwindows10が入っているPCに今回の講義のためにwindows7をbootするのはさすがに馬鹿馬鹿しい…
ということで
VirtualBoxを使ってwindows7の仮想環境内にH8マイコンの環境構築をして組込システム基礎を乗り切るっ!!
といった感じです
仮想環境を作ることで次いつ使うかわからないH8マイコンの環境をボタン一つで破壊できて環境汚染を最小限にできる!最高!
ホストOS: windows10 Home
ゲストOS: windows7 (IE11 on win7)
VirtualBox ver6.0.14
ここまでの長い前置きはさておきいざ環境構築です
https://www.virtualbox.org/ からvirtualboxをダウンロード
次にVirtualBoxマネージャーから新規で仮想マシンを作成して仮想マシンの初回起動時にisoイメージを開いて…あ,isoイメージが欲しいですね
さて,isoイメージを落とすかぁとubuntuのisoイメージを落としてくるのと同じノリでmicrosoftのwindows7のisoイメージのダウンロードページに行くと
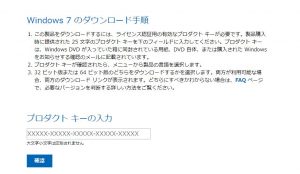
号泣
プロダクトキーがいるんですね()
なんか方法ないんかーーと思い調べていると…
かつてmodern.IEと呼ばれていた(今はMicrosoft Edge Developerと呼ばれているらしい)仮想環境をmicrosoftが提供しているらしいのでそれを使うことにしました
これはmicrosoftの提供するwebページの動作検証などに本来使われているようです
コレ,ライセンスが90日間有効みたいなのですが,12/9(僕が入れた日)からであれば第4Q(2/7まで)にしかないこの講義は耐えれるっ!ということで迷わず採択
https://developer.microsoft.com/en-us/microsoft-edge/tools/vms/ ここから
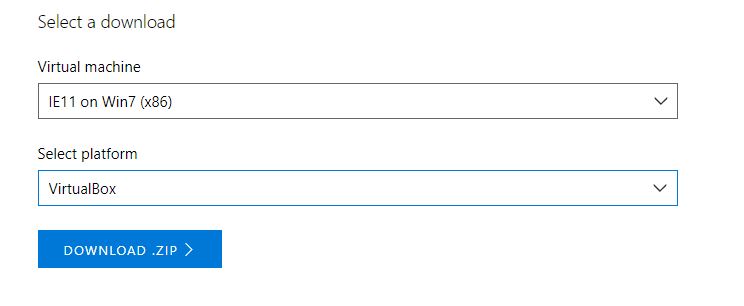
こうして

こうっ
すると展開した中に
IE11-win7.ovaっていうのがあるのでこいつを開くと仮想環境の構築が自動でできます
ovaファイルは自分で仮想マシンを作成するときの設定が事前に入っているものなので自分で環境を作るよりかはサクっと進みますね
![]()
これのデフォルト値だとビデオメモリが足りないみたいなので[設定]->[ディスプレイ] からビデオメモリを32MBとか64MBにしとくとよさそう
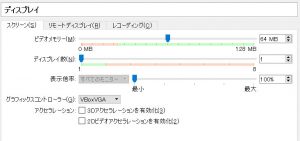
ついでに仮想マシンの名前はkumikomi-saikouにでもしておきましょう

これで

それではwindows7を起動!...しても現状ではゲストOSであるwindows7からUSBで接続したマイコンボードに接続することはできません
なのでwindows7を起動していない状態で,今回使用するマイコンボードをPCに接続
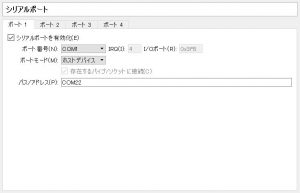
その状態で,[設定]->[USB] からUSBコントローラーを有効化してUSB2.0(ETHI)コントローラーを選択し
右のUSBを追加できそうなところをクリックして
Vstone Co.,Ltd. VS-WRC003LV COM Port [0001]をUSBデバイスフィルターに追加します
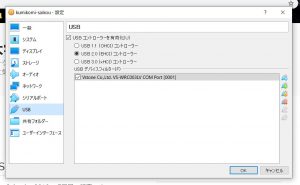
これで
windows7を起動
上のメニューバーからクリップボードの共有とドラッグアンドドロップを双方向で有効化できるので,有効化してホストOSのwin10からゲストOSのwin7にHterm.exeを移行!
Hterm
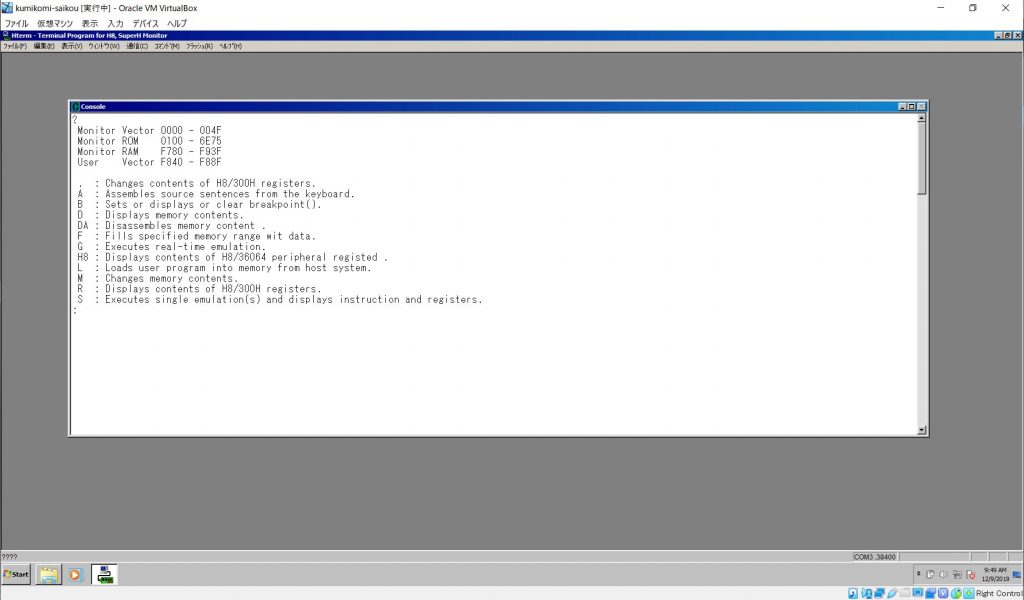
最高~~~~~~~~~~~~
といった感じでいけました
他に使用するものも基本入れれたので大丈夫でしょう(たぶん)
これで環境汚染を最小限にできました!
未来のシステム制御民の環境汚したくないerはぜひ参考にしてみてください
ちなみにこの方法を使えばwindowsしかこのソフト使えないよと言われて
(´・ω`・)エッ?
ってなってた人もubuntuなどのLinuxだろうとMacだろうと無理にwindows入れずに乗り切ると思います(たぶん)
知識が豊富なわけではないので虚偽の情報が入っていた場合はご指摘をお願いします.
ホストOS側でこのボードがCOM22で認識されていたので,ポートモードをホストデバイスに設定してCOM22をゲストOS側にCOM1と認識させるんかなと思ったらうまくいかなかった
USB-シリアルコンバーターのおかげでシリアルポートではなくUSBとして認識されている?
https://qiita.com/studio15/items/26bfb665aa024c5a5568
https://developer.microsoft.com/en-us/microsoft-edge/
https://developer.microsoft.com/en-us/microsoft-edge/tools/vms/
Alexaから施錠する様子:
隣のラボがスマートロックを買ってたのでうちも欲しかったんですが、高い…
ケチなのでつくってみました。
あとEcho DotがUnlimited Musicとの抱き合わせで安かった。
サムターンに直接サーボをつけるなどして動かす例はよく見かけますが、これだと
点が困ります。2番についてはボタンを設けるなどできるでしょうが、もともと機械的な仕組みで動いていたものを電気的な仕組みで覆ってしまうのが好きでないので、機械的な仕組みはそのまま残す方針にしました。
もちろん市販のものはこの機能は満たしています。
というわけで以下を目指します。
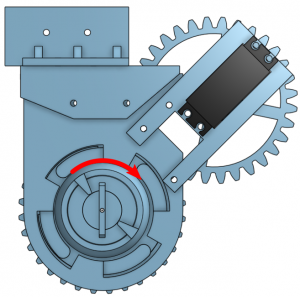
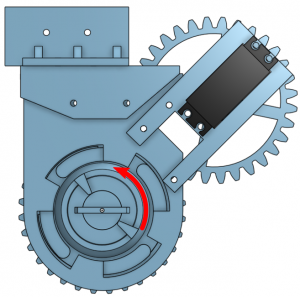
動画を見てもらえば概ねわかるとは思いますが、サムターンに爪を引っ掛けることで駆動します。またこのおかげで、人間が直接操作することもできます。
デフォルト状態:
爪がこの位置であればサムターンに干渉しないので今まで通り機械的な鍵として使えます。
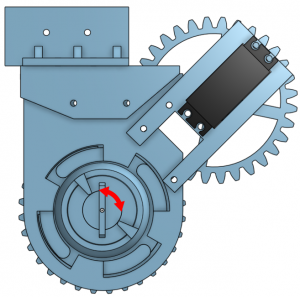
施錠:
爪を90度右回転させ、施錠します。サムターンは45度くらいがスレッショルドのようです。
解錠:
施錠の逆です。
この仕組みだと動いている途中に停電になると困ったことになりますが、そこは目を瞑ります…
以下がCADのリンクです。
また動画ではAlexa+ESP32で動かしています。諸事情によりサーボを直接動かしているのはRaspberry piですが。
Alexa+ESP32は以下などが簡単のようです。Alexa用の既存スマートホーム製品になりすましているらしい・・・?
https://bitbucket.org/xoseperez/fauxmoesp/src/master/
あと動画上にも写り込んでいるPaSoRiを使ってFelicaも対応しました。
これはググればすぐ出てくるので省略します。
皆様ごきげんよう。
部長の…ここでは煎餅と名乗ってだけおきます。
そういえばロ技研では垢名で呼び合う人が多いイメージですが,私は呼ばれても多分反応できません。
本年のrogy Advent Calendarが本日より開始されます。その開幕として部長である私がブログを書きます。
ロ技研のAdvent Calendarでは色々なブログが登場します。技術関連のお話もそうでないお話もあるかと思うので,今から楽しみです。
皆さんこんにちは。アクア研17の煎餅の人です。
本日は,我々アクア研が参加してきた「水中ロボットコンベンション in JAMSTEC 2019」の参加報告をさせていただきます。

皆さんこんにちはAssist研の15みやたです.
今回は僕が開発に携わっているロボットハンド,通称Avatar Handを紹介します.

“Avatar Handの紹介” の続きを読む
ごきげんよう, ヒューマノイドロボット部門ACT代表のゆきです.
2019年2月のROBO-ONE autoが中止となりましたため, 練習会「加速杯」(かそくカップ), ならびに技術交流会を, 来たる2019/3/17(日)に開催いたします.
詳細は以下の通りです.