ロ技研ブログをご覧の皆さんこんにちは、部長の山本です。
これは rogy Advent Calender 2018 の1日目の記事です.
今年もあと1か月を残すところとなりました。
普通ならきたるクリスマスの到来に浮ついている時期ですが、相変わらず進捗に迫られる毎日です。
ということで、今年もまたrogy Advent Calendar開催いたします。
技術ネタから身近なライフハックまでどのような記事が出てくるかご期待くださいね!
東京工業大学の公認サークル「ロボット技術研究会」のブログです。 当サークルの日々の活動の様子を皆さんにお伝えしていきます。たくさんの人に気軽に読んでもらえると嬉しいです。
分類してほしい
ロ技研ブログをご覧の皆さんこんにちは、部長の山本です。
これは rogy Advent Calender 2018 の1日目の記事です.
今年もあと1か月を残すところとなりました。
普通ならきたるクリスマスの到来に浮ついている時期ですが、相変わらず進捗に迫られる毎日です。
ということで、今年もまたrogy Advent Calendar開催いたします。
技術ネタから身近なライフハックまでどのような記事が出てくるかご期待くださいね!
こんにちは。Cheeseの17のぴらふです。
工大祭二日目でも一日目に引き続き、Cheeseではマイクロマウスを展示しています!
マイクロマウスとは、迷路を自動で探索して最短経路を求め、ゴールにたどり着く速度を競うロボットです。

工大祭にて体育館でマイクロマウスの展示をしてますー
見に来てねー pic.twitter.com/3cbgSfXUbF— dangorogoro (@dango_bot) October 5, 2018
かしこいロボットが迷路を駆け回る様子、ぜひ見に来てください!
おはようございます.
前夜祭(部室徹夜進捗)が響いて, 無事に二日目無事に寝坊した16のゆきです.
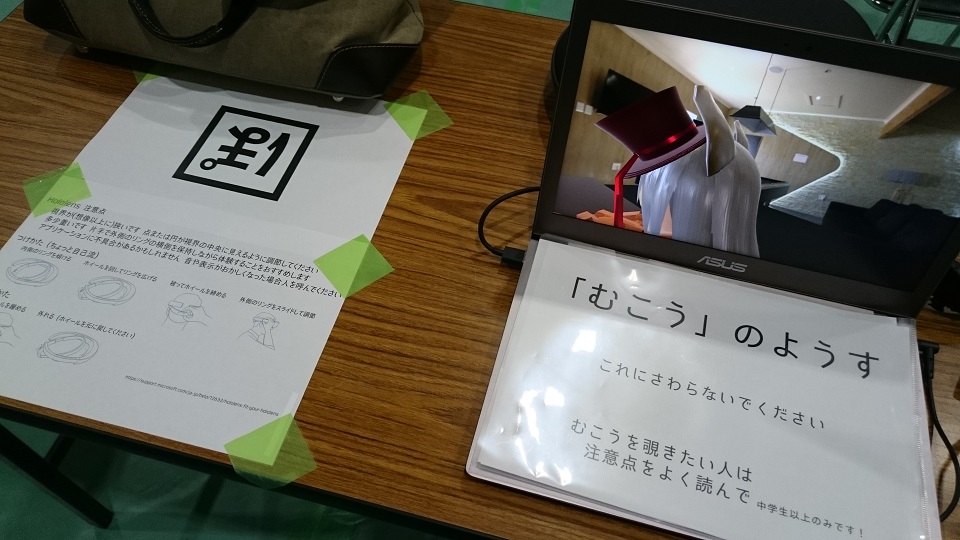
EEPCとは何か?
End-Effector Position Control (手先位置制御) を勝手に略したものです.
まずは動画をご覧ください!
https://twitter.com/blessingyuki/status/1048346486851829760
スライド抵抗で位置の変化を検出し, マイコンに逆運動学(手先と土台の位置を元に関節の角度を決定するアルゴリズム)を高速で解かせて, まるで手先が止まっているかのように振る舞わせています.
詳細な実装については後日改めて掲載予定です.
13時頃に到着予定ですので, ご興味ありましたら是非遊びに来てください!
どうも,おにぎりです.
工大祭1日目,お疲れ様でした.
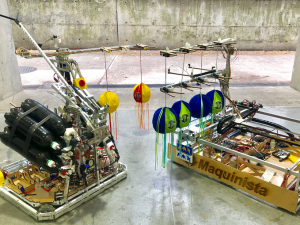
さて,私は今まで工大祭では非円形歯車や双葉車といった変わった歯車を展示してきました.
今年は,そんな変わった歯車をメインに取り込んだラジコンカーを展示しています.
このラジコンカー,動きも操作もごくごく普通のラジコンカーなのですが,なんとタイヤが楕円なんです!
明日明後日の工大祭のロ技研ブース(体育館)にて、ラジコンカーを展示します!
なんとタイヤが楕円形!それだと乗り心地が悪い?いえいえ。
なんと上下の揺れがなく、一定速度で進むことができます。
さて、どんな機構なのかは来てみてのお楽しみ!!! pic.twitter.com/1loznI1JVU— おにぎり型機関銃@楕円輪ラジコン (@manami1433) October 5, 2018
タイヤが楕円なのにも関わらず,上下に揺れることもなく,進む速度も一定なんです.
この秘密はもちろん全て歯車に隠されているわけですが,詳しい話はぜひ展示場で!
明日も展示がんばるぞ~
こんにちは、18のHitomosiです。
私はAssist研という研究室でHIDデバイスを作っています。今回の工大祭では、傾けると動くマウスを展示します。
工大祭で展示予定の、傾けると動くマウスです。
ダブルクリックの成功率は低いんですが、なんとか調整できたらなと思ってます。 pic.twitter.com/66CW9wbAzj— Hitomosi (@Hitomosi_TIT) October 4, 2018
3軸加速度センサを用いて重力加速度からどの程度傾いているかを判定しています。机がなくても片手で操作ができることと、HIDドライバを使っているので、たいていのPCに接続するだけで動作するのがポイントです。
こんにちは.まるくす(@UMR_UMA_RUX)です.
ロボコンも終わり時間が出来ました.(※要出典)
ところで私のおうちのエアコンは,時間が経つと勝手に切られる仕組みとなっております.
連続稼働〇時間でとかではなく適当なタイミングで,勝手に切られます.
今回はこの仕様に対抗するためタイトルの通りのマシン(笑)を作成しました.

することはいたって単純で,エアコンのスイッチがOnからOffになったのを検知したらソレノイドを動かす.それだけです.
単純なのでマイコンレスで作ってみました.
その過程を大雑把に以下に記します.
—
実際に電源つけっぱなしで放置するにあたって,一番怖いのは火災です.
自作回路が火を噴いた!なんてことがあればおうちを追放されることは想像に難くありません.
安全に気を付けつつ回路を作っていきます.
回路図載せようかと思いましたが,紙に書いたものしかないのと,デジタルで書き直すのが面倒なため断念.
簡単に言うと,フォトダイオードの信号を増幅してコンパーレータに突っ込み,その出力をNAND素子とRC回路でえんやこらしました.結果としてエアコンがオンからオフになった瞬間から1秒間ほどだけソレノイドを動かす回路が出来ました.そんなこんなで回路は完成です.
そして当然,回路だけでは動かないのでガワを作りました.
はじめてFusion360を使ってみましたが中々使い心地がいいですね.
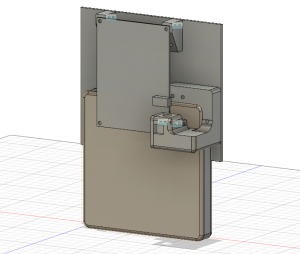
あとははんだ付けをして,組み立てて完成しました.
無事に動いて幸せです.

今までは回路は回路制御班の皆さんに任せっきりだったのですが,自分で作ってみると難しいですね.回路制御班のありがたみを身にしみて感じました.でも楽しかったのでまた作ってみたいです.
というわけで無事動いたのですが,おうちの管理者に無事止められてお蔵入りとなりました.めでたしめでたし.
工大祭展示が完成しなかったら代わりに出そうかなと目論んでます.
こんにちは、やまだです。
セキュリティ・キャンプ2018に応募してみたら通ったので行ってきました。
参加したコースは、YトラックのOS開発ゼミの、最先端OS談義というコースです。
5日間あったセキュリティキャンプで、トラックでの活動は、キャンプ2日目から4日目までの、おおよそ3日程度でした。
同じOS開発ゼミでも、3つのコースがあり、他のコースはゴリゴリ実装していた感じなのですが、私のコースはまさにゼミという感じでした。
1日目(キャンプ全体では2日目)は、OSの役割、歴史に関することを学びました。それを学んだ上で、現代のOSの課題や改良点を各自で探しました。
1日目で探した課題点について、解決策を自ら考え提示しました。必要ならば簡単な実装もしました。
このあたりは、講師、チューターの方がいろいろとサポートしてくれたので、露頭に迷うことなく比較的スムーズに進めることができました。
この日は今までの成果のまとめを行いました。自分たちで見つけた課題点について、考えた解決策、それがどのくらい有効なのか、といったことをスライドにまとめて発表しました。
発表はトラック全体で行われました。
となりの人々が強そうなカーネルモジュールを作っていたりして強そうでした。
また、実は隣でコンパイラ開発とベアメタルプログラミングをやっていてました。コンパイラはセルフホスティングしていたりしていて、すごかったです。
自分の弱さに絶望するので良い機会だと思いました。
キャンプ中の進捗についてですが、まだ詰めきれていないところがあるので、ある程度区切りがついたら公開したいと思います(公開できるかなあ……)。
全体講義としていくつかの講演と、仕事紹介、グループワークなどがありました。
また、最終日には各コースごとに成果発表がありました。
他の人がめっちゃ強いことをしていてめっちゃ強いなあと思いました。
僕はセキュリティとかマルウェアとかよく知らないのですが、そのあたりのトラックの発表もあり、自分の知らない世界が無限に繰り広げられていました。
お勉強しなきゃなあ……。
キャンプ中は、食事や睡眠などあらゆることがサポートされていてとても過ごしやすいです。
1年ぶりくらいに1日3食生活を送りました。足りないということはないと思います。
あと水が無限に提供されます。お菓子も有限ですが提供されます。
講義部屋は基本エアコンが効いていて、宿泊するための個人の部屋も毎日掃除されるので最高です、一生あそこで暮らしたいと思いました。
キャンプ中は生活習慣が改善され、朝型の生活を送ります。ただしキャンプが終わるとすぐに夜型に戻ります。これには個人差があると思われます。
基本的に外出は禁止されていますが、外が嫌いなので僕は全く問題ありませんでした。外出しなくても快適な生活を送ることができるので最高です。
また、本とかステッカーとか、なんかいろいろもらえます。とても嬉しい。
行って後悔することはないと思うので、ぜひ応募してみることをおすすめします。とても楽しかったです。