ごきげんよう。
20のAo(@musclemusale)でございます。
恐らく20では初めての投稿になるかと。
本日はFusion 360で”はすば歯車”と”やまば歯車”を作成したのでその過程を共有したいと思います。
Google検索をかけても はすば/やまば歯車をFusion 360で製作しているサイトが見当たらなかった(2021/3 現在)ので参考になれば幸いです。

東京工業大学の公認サークル「ロボット技術研究会」のブログです。 当サークルの日々の活動の様子を皆さんにお伝えしていきます。たくさんの人に気軽に読んでもらえると嬉しいです。
分類してほしい
ごきげんよう。
20のAo(@musclemusale)でございます。
恐らく20では初めての投稿になるかと。
本日はFusion 360で”はすば歯車”と”やまば歯車”を作成したのでその過程を共有したいと思います。
Google検索をかけても はすば/やまば歯車をFusion 360で製作しているサイトが見当たらなかった(2021/3 現在)ので参考になれば幸いです。
15 の nomo ( @nomotech )です。
この記事はrogy Advent Calender 2020 24日目の記事です。
15 の nomo ( @nomotech )です。
この記事はrogy Advent Calender 2020 23日目の記事です。
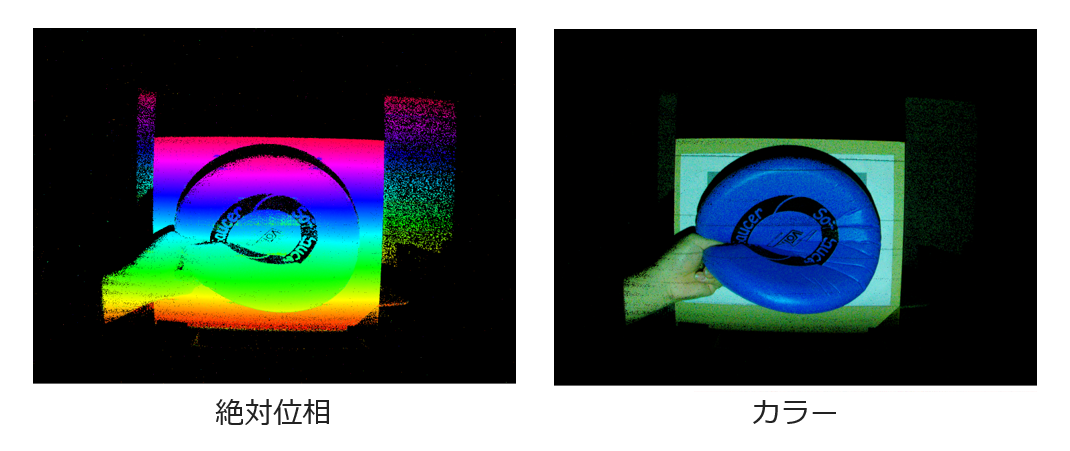
RGB-Depthセンサを自作しよう【3-キャリブレーション編】の続きです。
今回はついに構造化光法についてです。
絶対位相の計算とカラーの計算までを解説します。
15 の nomo ( @nomotech )です。
この記事はrogy Advent Calender 2020 22日目の記事です。
RGB-Depthセンサを自作しよう【2-同期撮像編】の続きです。
今回はプロジェクタカメラのキャリブレーションについてです。
まずはステレオカメラシステムの場合のキャリブレーションについて説明します。
ステレオによる深度推定はそれぞれのカメラの画素で同じ3次元点を参照している対応点を見つけて、三角測量によって深度を測定します。
カメラのステレオの場合、特徴点などを使って対応点を見つけます。
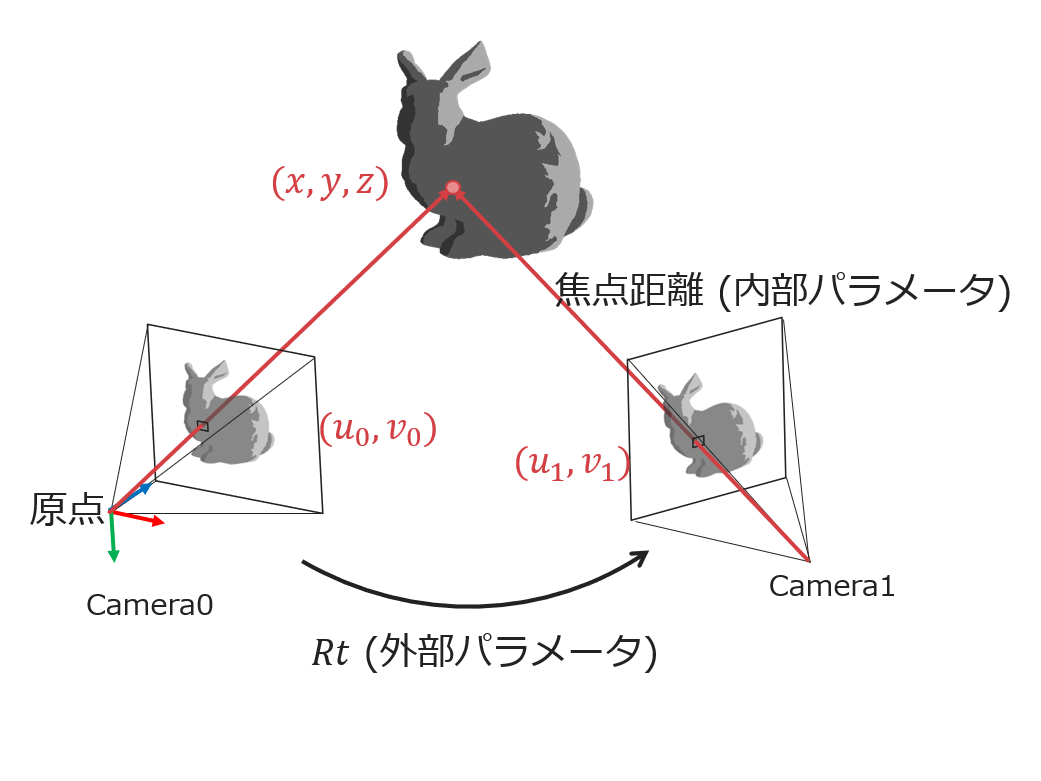
三角測量の時に必要なのはそれぞれのカメラから対象までの方向ベクトルです。
15 の nomo ( @nomotech )です。
この記事はrogy Advent Calender 2020 21日目の記事です。
RGB-Depthセンサを自作しよう【1-基礎知識編】の続きです。
今回は同期撮像についてです。
早速深度センサを自作していきます。
今回使用するのは以下の部品

“RGB-Depthセンサを自作しよう【2-同期撮像編】” の続きを読む
こんにちは、15 の nomo ( @nomotech )です。
この記事はrogy Advent Calender 2020 20日目の記事です。
ちょっと諸事情合って記事の公開が遅れました、すみません。
今回から 5 回にわたって連載していきます
まず1回目は基礎知識編です。
近年ロボットや VR などの分野で3次元計測の需要が高まっています。特に静止物体ではなく移動物体の3次元データが欲しいという機会は多いと思います。
皆さんは通常深度情報が欲しいなというときには市販の深度センサを購入して使っていると思いますが、市販されている深度センサは速度面で問題があったり使用用途に対して最適なものになっていなかったりすると思います。
実際ロボットで画像使いたい場合って長距離はLIDERとか使えばいいと思うんですが、ピッキングをする場面などで、近距離の物体の形状を知りたいというときにちょうどいい測定距離のセンサがあんまりなくないですか?
ということで、今回は高速に深度とカラーを得られるRGB-Depthセンサを自作していこうと思います。
“RGB-Depthセンサを自作しよう【1-基礎知識編】” の続きを読む
皆さんメリークリスマス、18のたくぽんです。
この記事はrogy Advent Calender2020 の25日目の記事です。
タイトルの通り今年(2021)のNHKロボコンのルールの紹介をして、それだけだと寂しいので去年の角管曲げ加工についても少し触れようと思います。
中国の伝統的な遊びがモチーフになっていて、フィールド上の「壺」に向かってロボットが矢を投げ入れます。各チームDR(ディフェンスロボット)とTR(スローイングロボット)の2台のロボットを制作し、壺に入れることのできた矢の本数で点数を競います。
今年の大きな特徴は相手への妨害が許可されていることです。いくつかの「壺」は回転するテーブルの上に取り付けられており、DRが回転させて壺の位置を動かすことができます。穏やかじゃないですね。


詳しいルールはこちら
久々の対戦型ルールで、2017年のAPPARE!を思い出します。名実ともにどつきあうロボコンになるので(特に見てる側は)とても楽しいルールだと思います。
2020年のルール「ロボラグビー」では、相手から飛んできたラグビーボールが期待に衝突する危険がありました。そこで、ボールから回路を守る回路ガードを制作しました。

角管を曲げた部品をふんだんに使っています。軽いし強いしオシャレだし、最高ですね。
↓は自分が担当したロニーの回路ガードです。スーパーカーのガルウィングみたいに斜めに開くので、回路へのアクセス性も良いです。
初めて回路ガード動かしたときの動画
曲げ加工たのしい pic.twitter.com/KRrEdrSZjV— たくぽん (@takupon009) September 26, 2020
曲げ加工には自作のベンダーを利用しています。

今年は何かと大変な状況ではありますが、大会出場・優勝を目指して頑張っていますので、応援よろしくお願いします!
こんにちは.18のhiraです.
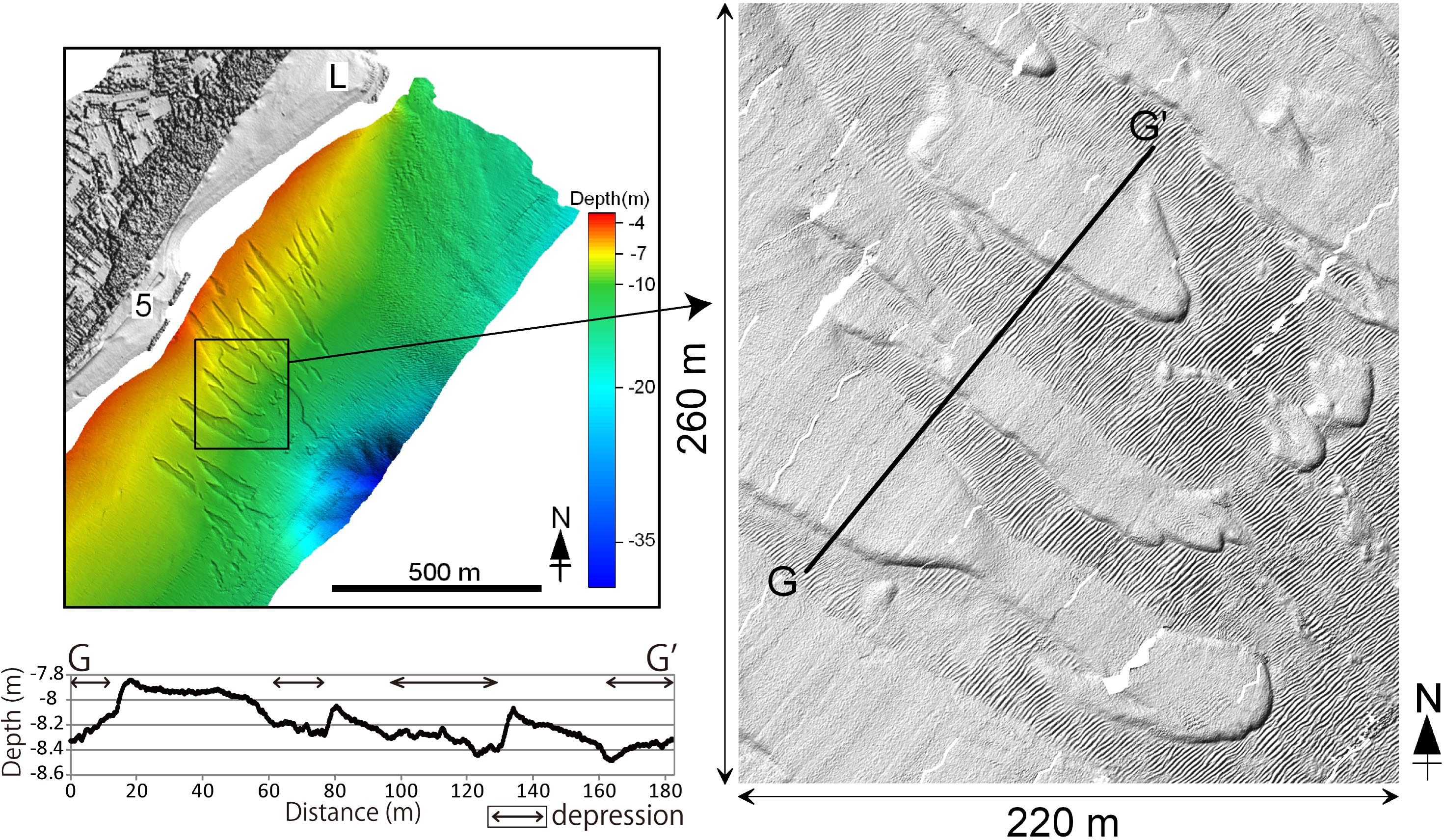
僕は水中ロボットを製作するアクア研で活動しています.そんな水中探査では観測により地形図の作製をすること(マッピング)が目標だったりするのですが,水中では電波が急速に減衰するためレーザー測量を使うことはできません.そのため超音波ソナーを使います.しかしこの音波というものは指向性に乏しく,あらゆる方向の反射波が重なってしまいます.そこで,今回はその反射波を数理的に解析し高度なマッピングを行うソナーの信号処理について書いていきます.
こんにちは.18のhiraです.
今回は先日12/5,6の土日に海洋開発研究機構(しんかい6500使っている研究機関!)にて行われた「水中ロボットコンベンション in JAMSTEC 2020 ~海と日本プロジェクト~」についての報告です.
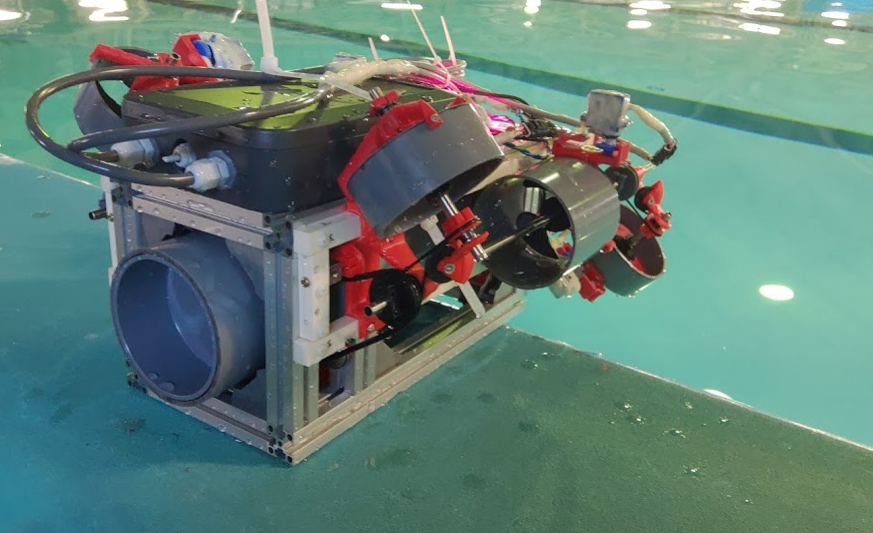
水中ロボコンは文字通り水中で潜水艇ロボットを走らせ,沈められたブイにタッチしたり,写真をとったりします.最近では自律ロボットAUVも盛んです.
そんな水中ロボコンですが,例年は8月末に開催されるのですが,今年はコロナの影響で12月初めの開催となりました.ロボット技術研究会アクア研からは17が製作した「Iwatobi」と18,19,20が製作した「イカヒコーキ」の2機が出場しました. “水中ロボコン参加報告” の続きを読む
この記事は rogy Advent Calender2020 19日目の記事です。
こんにちは、18のたくぽんです。
皆さんは低温調理というものをご存じでしょうか?食材を低温(60℃くらい)で長時間加熱することで、より柔らかく・おいしくいただく調理法です。鶏むね肉や魚介類が特に有名ですね。
しかし専用の低温調理機は高価で、なかなか手が出るものではありません。でも私も低温調理して豊かな食生活を送りたい。

ワンコインで1kgも食べられる素晴らしい肉、鶏むね肉。これを簡単においしく食べるべく、簡易的な低温調理機を作成しました。
低温調理機を作るにあたり、部品構成やプログラムについて以下のサイトを参考にさせていただきました。
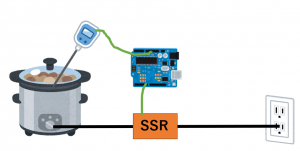
鍋の温度を測定し、所望の温度に保つようにSSR(ソリッドステートリレー)を使って鍋の電源のON/Offを切り替えます。
ちょうど家に授業関係で買ったArduinoが転がっていたので、マイコンはこれを使うことにします。
初めてのマイコン工作でしたが、ネットの情報を参考にサクサク進められました。先人は偉大。
こんにちは! pic.twitter.com/UrwpMF86Cp
— たくぽん (@takupon009) June 14, 2020
SSRで100V交流のオンオフできた pic.twitter.com/Yk6cruzLft
— たくぽん (@takupon009) June 14, 2020
要素ごとの動作確認ができたので、一度統合して動かしてみます。
めっちゃ簡易な低温調理システム起動した
鶏胸60度で90分 pic.twitter.com/uSx1k96Yao— たくぽん (@takupon009) June 14, 2020
割と水温維持できてる pic.twitter.com/JLRqZekUYs
— たくぽん (@takupon009) June 14, 2020
良い感じ👍
でもこのままだともじゃもじゃで取り回しが悪いので、ケースを作っていきます。電池駆動にしてPC抜きで動作できるようにもしたい。
CADで設計して…
いい感じにゲーム機感出てきた pic.twitter.com/OC7E7KswZ5
— たくぽん (@takupon009) June 21, 2020
3Dプリンターで出力して組み立てて…
良さげなケースできた pic.twitter.com/Jp0tR08I9B
— たくぽん (@takupon009) June 25, 2020
塗装!!
SFC感あるな pic.twitter.com/i1IPUJYrhR
— たくぽん (@takupon009) July 1, 2020
SSRまわりもコンパクトにして、本体とコネクタで繋げる方式にしました。
SSRまわりめっちゃコンパクトになった pic.twitter.com/XscbpOyB8u
— たくぽん (@takupon009) July 7, 2020
良い感じにまとまりました。△ボタンで設定温度を変えられるので、いろんな調理に対応できます。

鶏むね肉を調理してみましたが、めちゃ柔らかくできました。外側と内側で色のムラが無く、全体に均一に熱が入っていることが分かります。

目的のものを作ることができて大満足です。今後は温泉卵とかローストビーフにも手を出していきたいですね。
明日はnomotech先輩の記事になります。お楽しみに!