こんにちは.18のhiraです.
今回は先日12/5,6の土日に海洋開発研究機構(しんかい6500使っている研究機関!)にて行われた「水中ロボットコンベンション in JAMSTEC 2020 ~海と日本プロジェクト~」についての報告です.
水中ロボコンは文字通り水中で潜水艇ロボットを走らせ,沈められたブイにタッチしたり,写真をとったりします.最近では自律ロボットAUVも盛んです.
そんな水中ロボコンですが,例年は8月末に開催されるのですが,今年はコロナの影響で12月初めの開催となりました.ロボット技術研究会アクア研からは17が製作した「Iwatobi」と18,19,20が製作した「イカヒコーキ」の2機が出場しました.
Iwatobi
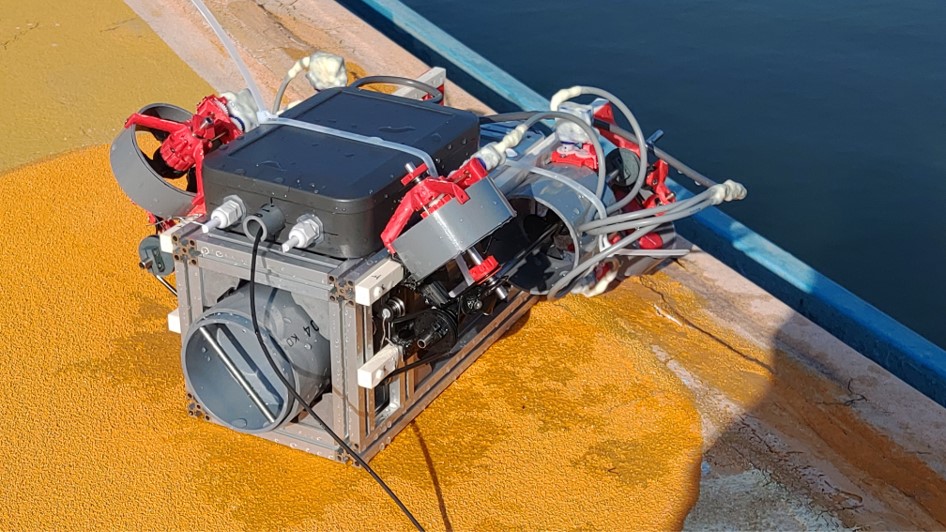
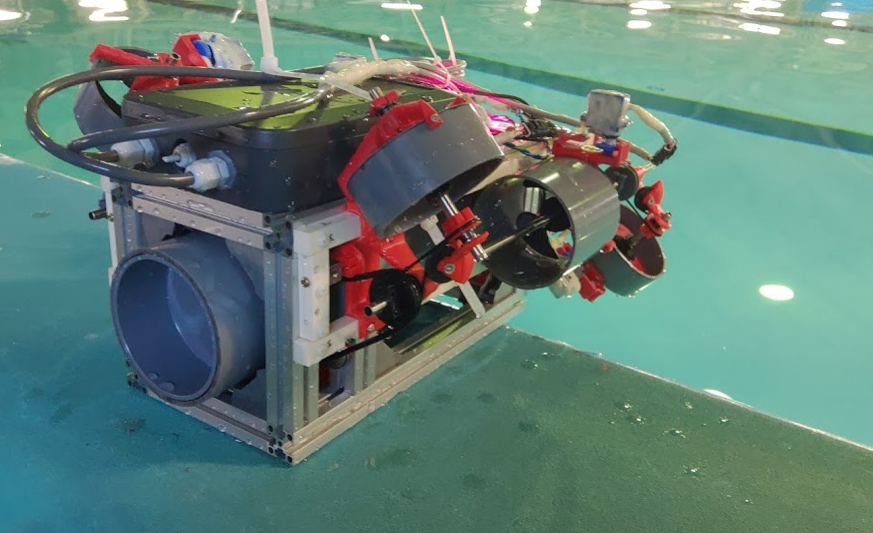
Iwatobiは船体を貫く太いパイプの周りに6つのスラスターがついた構造となっています.武骨なかんじのこの機体,実は驚くべきカラクリで動きます!
水中ロボットのほとんどはバッテリーで動きます.地上からの何百m,何千mのケーブル送電は長距離ケーブル内での抵抗による電圧降下が大きく現実的ではありません.そのため活動継続にはバッテリーが切れたら交換する必要があるのですが,水中でプラグ端子の電気的接点をむき出しにするのはかなり危険です.そのため大気中でやることになりますがいちいち引き上げて回収するのは面倒です.どうにか水中でバッテリーを交換する方法はないでしょうか?
それを実現するのがIwatobi の機構です.なんとなんと,Iwatobiはバッテリーと機体がつながっていません!?これなら水が侵入して困る端子も存在しないので水中で外して交換ができます.しかし「バッテリーがつながっていない」というのになぜ動くのでしょうか??その仕組みをご説明します!
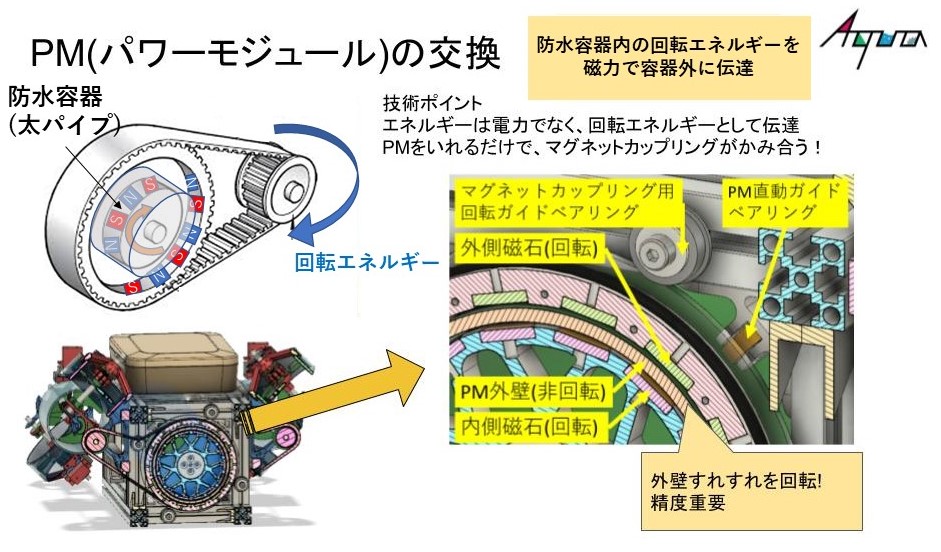
実は船体を貫く太パイプは着脱可能な円筒の防水容器となっています.この内部では上図左上のように側面を一周ぐるりと外向きに磁石が配置されていて,モーターにより回転しています.機体側には筒を取り囲むように回転機構がついているのですが,この回転機構の内側にはパイプの磁石と対向するように配置されており,パイプ内の磁石が回転するとつられて回転機構も回転します.こうして磁石により外側の回転機構が動かされ,各部のスラスターに動力が伝達されます.
では,このパイプの交換を実際に見てみましょう!
このようにガポっと抜いてガポっと入れるだけでおしまい.一瞬です!塩ビパイプを交換するだけなので,錆びたり通電したりする箇所を水にさらすことがありません.水中でもスムーズな交換が行えます.
このように動力を伝達できますが,パイプから伝達される回転エネルギーは正面の1箇所だけです.しかしこの機体にはスラスターが6器もあります.これでは6つのスラスターが全て同じ動きしかできません.進んだり,曲がったり,潜水したりと1つ1つのスラスターを調整するにはどうすればよいでしょうか?
この課題を解決するのがスクリューの可変ピッチプロペラ構造です.
スラスターの推力はスクリューの羽の傾きによっても変化します.これを利用して各スラスターの出力を変化させることで,同じ力が入力されても出力を変化させられます.
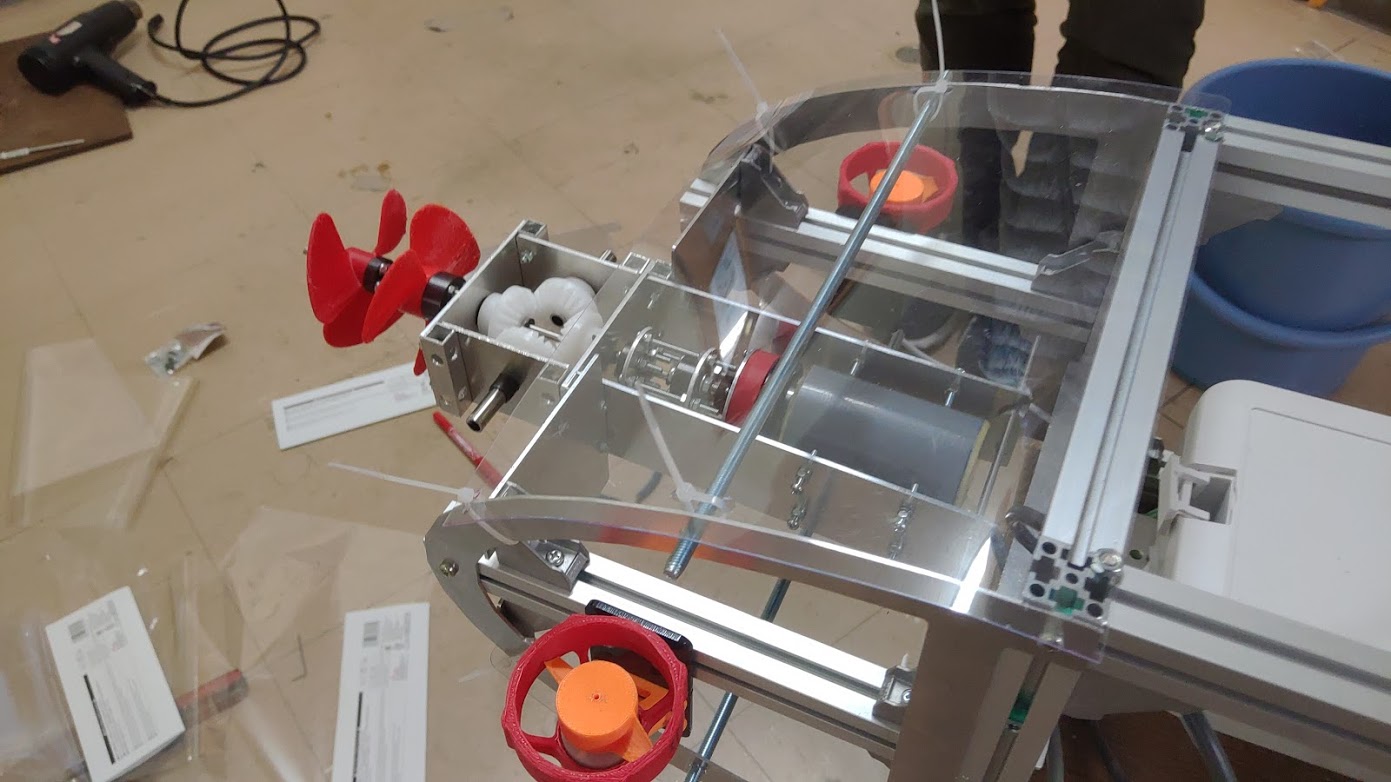
動画のようにスクリュー根本の小さな歯車が回転することでスクリューの羽が動きます.そして,実際に3Dプリンターも活用して製作した機構がこちらです.
このスクリューへの動力伝達は,磁石による1つの回転エネルギーをベルトで各スクリューへ伝達しています.回転を駆使した精密技巧ロボットです!
そして,これが本番のJAMSTECの最大水深3mの大水槽で泳いでいる姿です!
そして,下の方にある小窓から,中で泳いでいるロボットの撮影ができました!
JAMSTECでしか撮れないこの映像,ずっと撮ってみたかったんです! pic.twitter.com/tgYxapZXsm
— アクア研(東工大ロ技研 水関連の人々) (@rogy_aqua) December 8, 2020
ちなみにこのJAMSTECの大水槽には横に覗き穴が開いており,水中に潜っている機体が真横から見えるんです!静謐な水の中を意思を持ったように進む水中ロボットに,どこか静と動の美しさを感じました.
イカヒコーキ
イカヒコーキは文字通り飛行機のように翼をもった機体です.なんでイカってついたかは忘れました.グライダーのように水中を動き回るロボットを目指しました.
飛行機を模していますがメインとなるスラスターは翼でなく船尾にあります.このスラスターは二重反転スラスターという構造になっており,1つのスラスターが2つのスクリューを回します.実際の構造はこちらです.
上の動画のように4つの歯車と二重になったのパイプを使います.左の養生テープを回転させる内側の細いパイプは右の手元のギアから伸びており,手の動きの向きのままに回転します.一方右の養生テープを回転させる外側のパイプは歯車により手と逆方向に回転します.そして,実際の機体には養生テープの位置にスクリューをつけ,モーターで回転させます.
左の2枚重なったスクリューを同時に回します.こうすることで「ねじり」の力による姿勢のロール回転を相殺し常に一定の姿勢を保てます.
そして翼を付けたロボットの概形がこちらです!
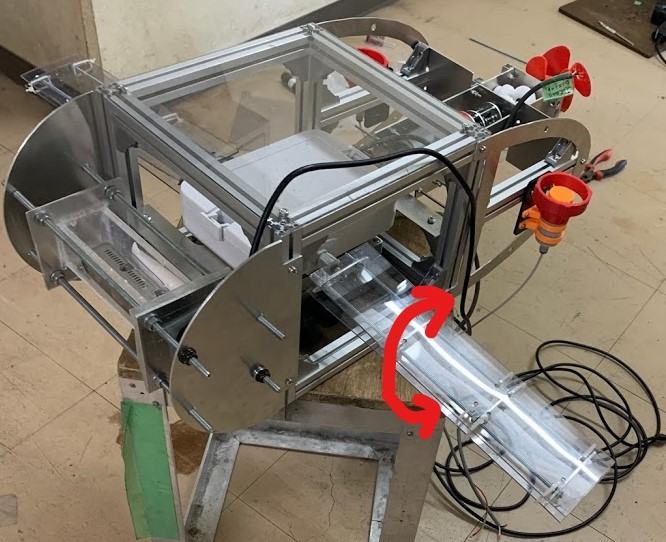
図の赤い矢印で示したように,翼自体がピッチ方向に回転します.これにより前後方向に進む力がかかると上下方向にも力がかかります.左右2枚の翼にかかる力を調整することで機体を回転させ曲がる仕組みです.
実際のプールでの動きはこちらです.
二重反転スラスターや翼はばっちり動いたのですが,残念ながらまだ浮力調整などが終わっていなかったため水中に入れると前のめりのような恰好になってしまいました.またメインスラスターである二重反転スラスターもちょっとパワー不足だったかなという印象です.実験では威勢よく吹いていたのですが,大きな機体なのでもっとパワーが要るのかもしれません.
またRealsenseという特殊なカメラを使いました.2つのカメラを搭載しているため,普通の画像に加え人間の目の様にその画素ごとに相手との距離がわかる立体視ができます.その画像がこちらです.
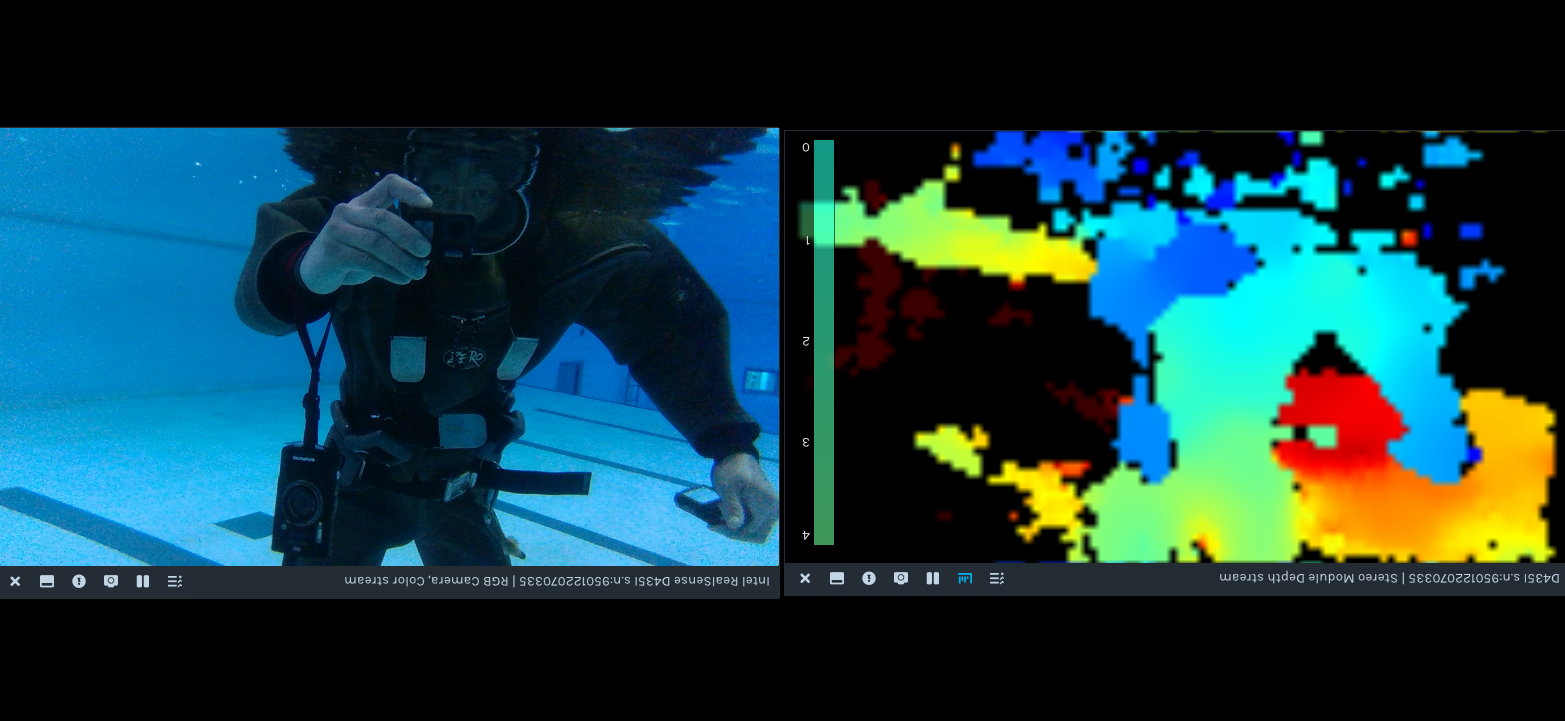
左は普通のカメラ画像,右は「深度」という相手との距離を表します.青ほど知覚,赤ほど遠いことを意味します.深度って水中だと水面からの深さの方と紛らわしいですが…
コロナでそもそも部活設備が使えないなど紆余曲折,波乱もありましたが,とりあえず形になって動いたことはうれしかったです.

大会を終え会場から出ると,夕暮れの中JAMSTECの調査船白鳳丸の明かりがぽつぽつと灯っていました.
今回の水中ロボコンのように,アクア研では水中ロボットを製作しています.次の目標はまだ未定ですが,センシングや制御面でも力をつけたいと考えています.陸上とは全く違う環境に挑む水中ロボットにもぜひご注目ください.
