どうも、F^3RC 1班 窓燕 リーダーのJichouPです
F^3RCの結果報告と反省をしたいと思います
結果
結果は1勝1敗で予選落ちでした
しかも1勝は0-0でじゃんけん勝ち・・・
でも、当日の試合直前まで回路と格闘して2試合目の直前で初めて足回りが(思い通りではありませんが)に動いたときはとても嬉しかったです
以下、各班ごとに書いていきたいと思います
機械班
機械班はチームで考えた機体のアイデアを元に、機体の形を作っていく班です
機体の仕上がりはこんな感じになりました
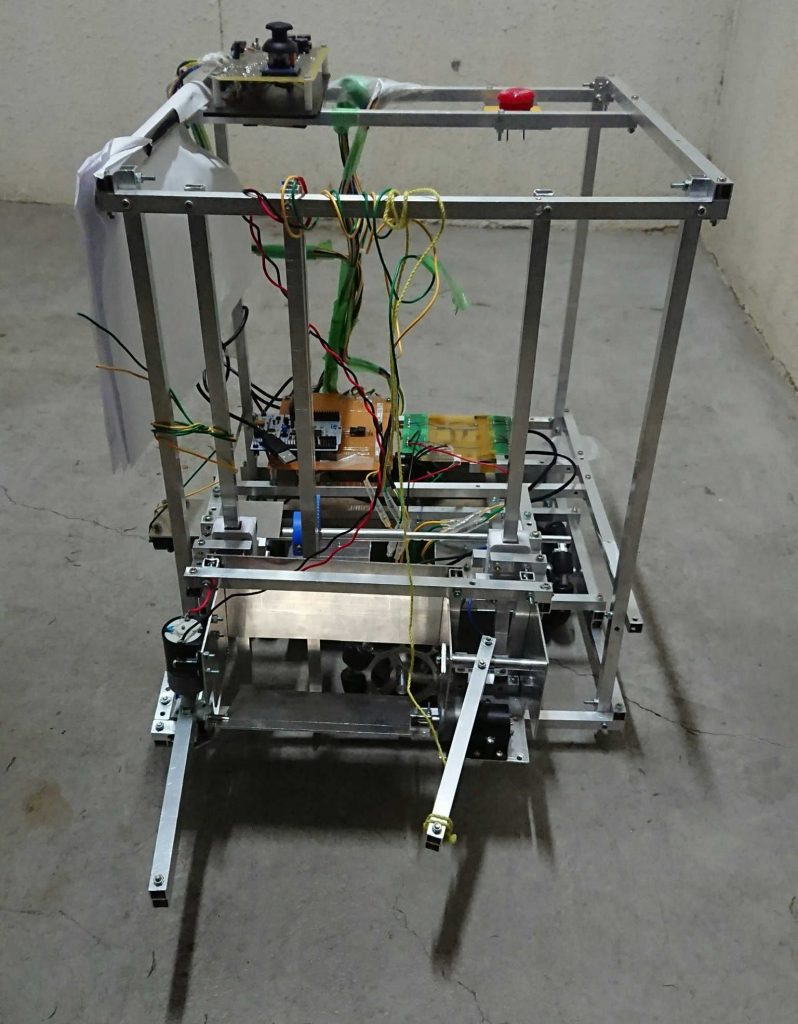
- 手動機
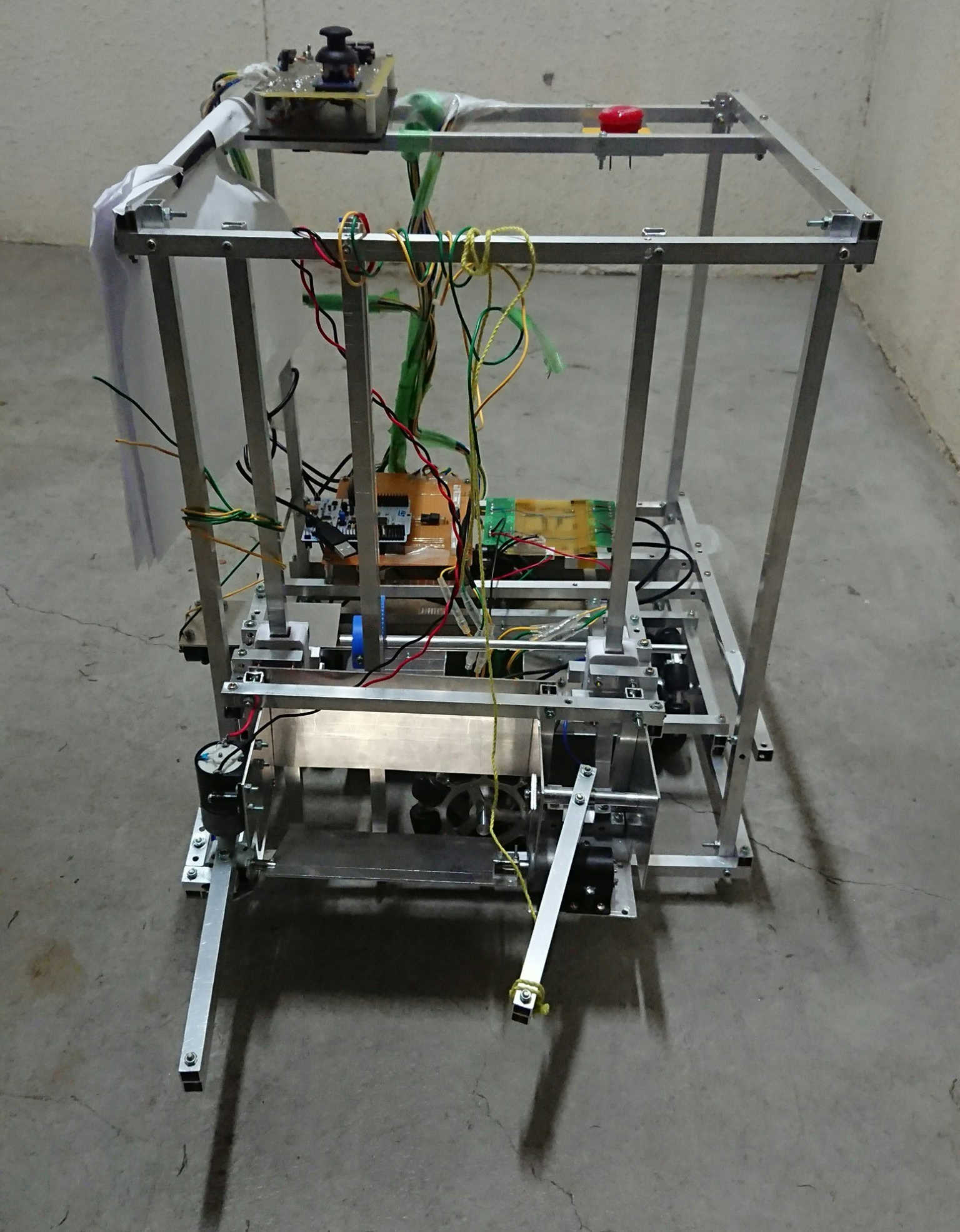
- 自動機


よくもまあ、こんなアルミの角材と板だけでここまで作り上げたものです
簡単に機体の詳細を解説していきたいと思います(回路についてもここでまとめて解説してしまいます)
手動機
手動機はオムニホイール4輪ですが、モタドラ回路の不調により左右の2輪しか動かせないので実質独立2輪になっています
前面のアームで燃料タンクや衛星サンプルを掴みます
燃料オブジェクトはアームを使って前面のスペースに押し込みます
また、アーム部は垂直機構になっていて、掴みたい物の高さに合わせて掴みにいくことができます
反省点としては、辺の中央にオムニがあるので、角4つにオムニを置く(一般的?な)形に比べて前進するために必要なモーターのトルクが2√2倍になってしまうことです
これにより、工大祭でもまともに走ることができませんでした
自動機
自動機の駆動は後方独立2輪+前方にキャスター1つで、3点で支えています
ライントレースはフォトリフレクタ回路の不調により断念しました
代わりに実験がうまく行って精度もよかった超音波センサを4方向につけ、なんとかしようとしています
・・・が、I2C通信が不調だったために加速度センサや方位センサが載らなかったため、完成してもおそらく決め打ちになったと思います
メイン基板を置く場所がなくて糸で吊るしてあったりと、ツッコミどころ満載です
機械班まとめ
この班は経験者が少なかったこともあって、かなり苦戦していたようです
でも、ちゃんと形にしてくれました
回路の進捗が遅かったせいでその努力を無駄にしてしまって申し訳ないです
回路班
今回はモータードライバの回路を自作しました。・・・が、これにより大会当日まで苦しめられることになります(笑)
モタドラ回路はこんな感じ
こんなスパゲッティ回路とにらめっこしながら、試合直前まであれこれしてました
素直に既製品のモタドラ回路を買うほうが絶対に良いです
工大祭ではにゅ~び~ずさんから既製品のモタドラ5つを買い取り、2日かけてモーターを思い通りに動かせるようになりました・・・が前述の通り、まともには走りませんでした
また、作る回路すべてが何かしらの問題を抱えていたため、予想よりも遥かに時間が取られてしまいました(ノウハウも何もなかったから仕方ないね)
おそらく今回一番闇を抱えていた班です
大会前日、回路班員は全員徹夜でしたが、それでもモーターが動いてくれませんでした
しまいにはモタドラがめちゃ熱くなり、ドクターストップをかけられてしまいました(おそらく回路がショートしていた)
しかし、大会当日にドクターストップを無視して改造した結果なんとか前後進と回転は出来るようになりました(回路はめちゃ熱いままでしたが・・・)
よく動くようになるまで頑張ってくれました!ありがとうございます!
制御班
最後に制御班です
この班は特に闇はなかったです(すべてgitのおかげなのではなかろうか)
回路の進捗が遅れたので仕事がなかなか振れずに、瀬戸際になって無理強いをさせてしまいました
でも、班員の全員がtraP所属だったからか、それともmbedを使用していたからか、言語の壁を乗り越えて頼んだ進捗をすぐに片付けてくれました。
はいプロ👏👏👏
最後に
全体の反省をして終わろうと思います
率直に言うとかなりグダグダでした
原因は制御班と機械班の連携がうまく取れてなかったことにあるように感じます
結論を言ってしまうと、大体は私のせいですね
夏休みに入ってからグダってしまたのが大きいです
もっと厳しく進捗管理をすべきでした
あと、全体的にハプニングが多かったように感じます
これも、進捗管理がしっかりできていなかった・・・というか、進捗管理が出来るほど全強の人がいなかったことに原因があるのかなぁと思います
もっと先輩を活用すべきだったのかなと感じます
私に限って言えば、回路について全く知識がところからのスタートだったのですが、プロ2人にいろいろ教えてもらって圧倒的成長ができました
ありがとうございました!
以上で、F^3RC 1班 窓燕の結果報告と反省を終わろうと思います
途中、かなり冗長な文章になってしまいましたがお付き合いありがとうございました!
