16のゆき(@blessingyuki)です。
これは rogy Advent Calender 2017 14日目の記事です。
【注意】
今までの記事が圧倒的進捗によって構成されていますが、この記事には一切の進捗の記述がありません。ただの二足歩行ロボットの布教です。どうか責めないでやって下さい。
さて皆さん、ふとももはお好きですか?
私の趣味はこの際どうでもよいので割愛しますが、世の中には色々なふとももがあります。[1], [2]
リンクを踏んだ方の屍を越えて、本題に入りたいと思います。
二足歩行ロボットの足についてのお話です。
はじめに
自分のロボットが完成していないいま手元にないので、まずはBostonDynamics社のAtlasくんをご覧ください。
下半身をよく見てあげてください。
足先にいくにつれて、非常に素早く動作しているのがわかると思います。
加えて、足の形全体もよく人に似ていると感じられる方が多いでしょう。
「人型ロボットだから当然なんじゃないの?」
もちろんそれもあるのですが、この形はなるべくしてこうなっています。
かんせいもーめんと
歩くロボット全般において、脚部の構成、特にアクチュエータ(駆動器)をどこに置くかという問題は非常に重要なものです。
一般に、アクチュエータは他の部品と比べて重く、これの配置によって動作の素早さが大きく変わってきます。
イメージは、公園のシーソーで端の方に乗るほど、相手からは動かしづらくなるアレです。
要は動かすものは軽い方がよくて、重いものはできるだけ動く軸の近くにあった方がいい、という話ですね。
人体もこれと同じような都合?で進化してきました。※諸説あり
その証拠に、ふくらはぎは膝に近いほど大きくなっています。
ふとももも胴体に近いほど大きくなっています。
(細かい話をすると、関節が動かしやすいように、一番太い部分は胴体側からちょっと離れたところですが。)
もちろん腕に関しても以下略。
他の動物も見てみましょう。
人と違った二足歩行をする動物に、鳥がいます。
鳩の足の解剖図を、山階鳥類研究所報告から拝借しました。
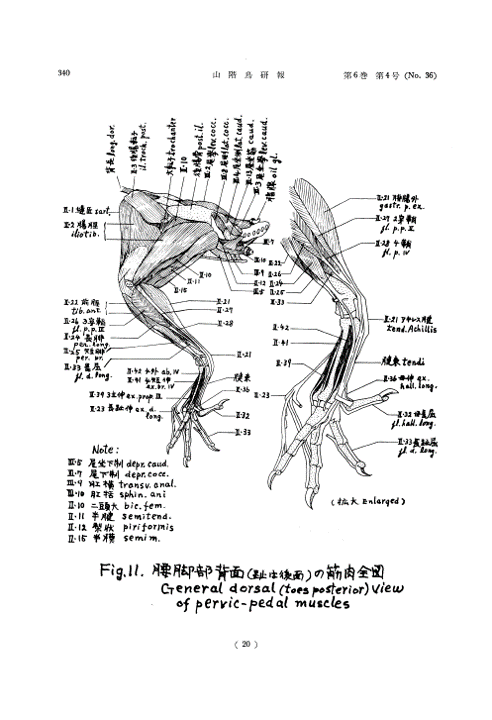
ふとももが凄い発達しているのがわかりますね。
反対に膝下はほとんど筋肉がないです。
これは太ももにある筋肉の力を腱で伝えているわけですね。
(またしばらくしたら詳しく書くかもしれません。)
この構造は人の手によく似ています。
サバンナで狩り……鬼ごっこをしているフレンズとは全く異なる脚構造ですが、これはこれで俊敏な足の動作に特化している一つの形と言えるのかもしれません。
ところで!鳥の足を再現したロボットもあるんですよ。
こちらの動画は見た人も少ないかもしれません。
オレゴン州立大学のAtriasくんです。
なんでもダチョウをモデルにしたとか。
おわりに
「俺たちのふとももはこれからだ!」
鳥をモチーフにした二足歩行ロボットもあるんだぜ!というお話でした。
ちなみに私が作っているのは人型です。(完)
最近は鳥の動きも参考にしていたりします。
うまくいくといいなぁ……
明日のアドベントカレンダーは @_xpfくん が物理エンジンのお話を書くかもしれないそうです。お楽しみに!?
