※この記事にはロボットへの暴力的な表現が含まれています。
はいこんにちは!修士2年の鈴木です!(Twitterはやっていないです)
今回は、鈴木の修士課程も卒業間近ということで修士論文についての話をしません。
いつも通り、同期の仲鉢(メカ担当)と鈴木(弱電、ソフト担当)とで参加したロボコンの話をします。
■Robo-One Lightに出てきました

二足歩行ロボットの格闘競技です。要するに相手を3回ぶん殴って倒すと勝ちます。重量1kg。
■経緯
知能ロボコン終了(2018年6月)
↘
現実と向き合い修論を書かなくてはいけない
↙
つらい(10月)
↘
つらいからロボコンに出よう!!!!(錯乱)
_人人人人人人人人人人人人人人人_
> つらいからロボコンに出よう <
 ̄Y^Y^Y^Y^Y^Y^Y^Y^Y^Y ̄
冷静に見直すと完全に正気ではないのですが、こんなことを考えた修士学生が当時、2人ほど確かに存在しました。研究して欲しい。
ちなみに予定はこうなります。
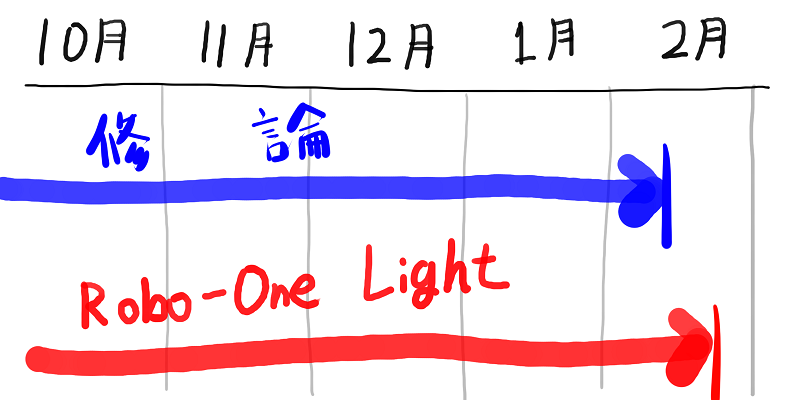
どう見ても修羅場です本当にありがとうございました。
■コンセプトを決めよう!
というわけで唐突に二足歩行ロボットを作ることにしました。当時鈴木は二足歩行制御経験なしです。当然修論も0文字です。
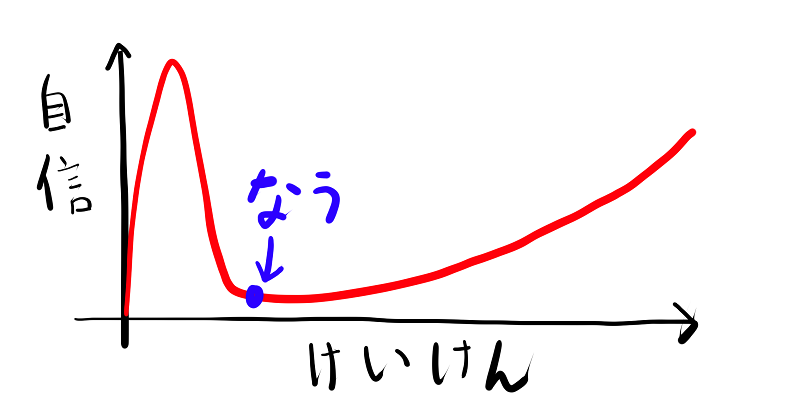
ところでみなさん、ダニング・クルーガー効果をご存知ですか?
これです。
当時のぼくはここです。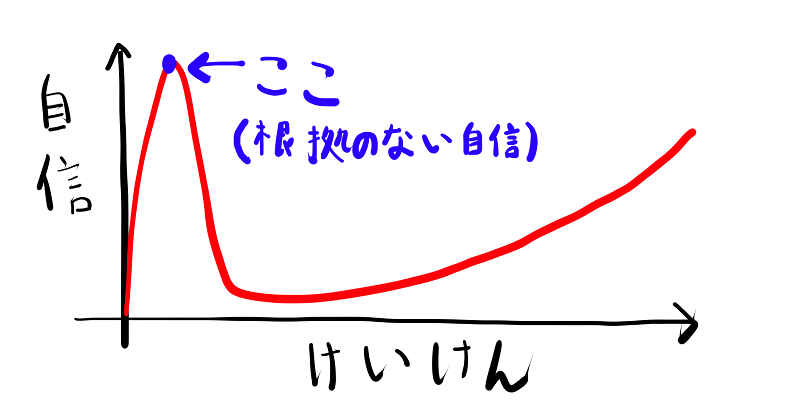
この溢れんばかりの愚かで無根拠な自信、楽しまないことには損ですね!!!!この勢いでコンセプトを決めてしまいましょう。
さて、最近も二足歩行ロボットの動画とかネットでちょくちょく流れてきますよね。
その中でも鈴木に印象深かったのは、これです。
この動画の1:28~1:32の部分です。
ぶん殴っても転ばないアレです!!
これやってみたいです。
インドア系の鈴木は腹を殴られようものなら即絶命しますが、二足歩行ロボットくんがそれに耐えられたのならば戦士として鈴木を超えたと言っても過言ではないでしょう。製作物くんには製作者の屍を越えていって欲しいですよね。
というわけでコンセプトは、『ぶん殴られても倒れない』になりました。
実現のポイントは恐らく、
1. 攻撃や姿勢を正確に計測し、
2. バランスを保ちながら、
3. 素早く移動しつつ、
4. 修論を書く
の4点ですね。絶対笑顔で卒業しような。
■メカを作る(メカ担当 仲鉢)
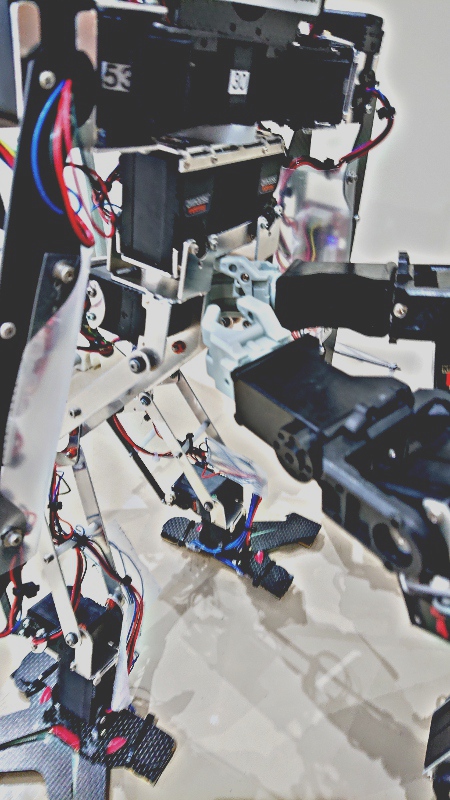
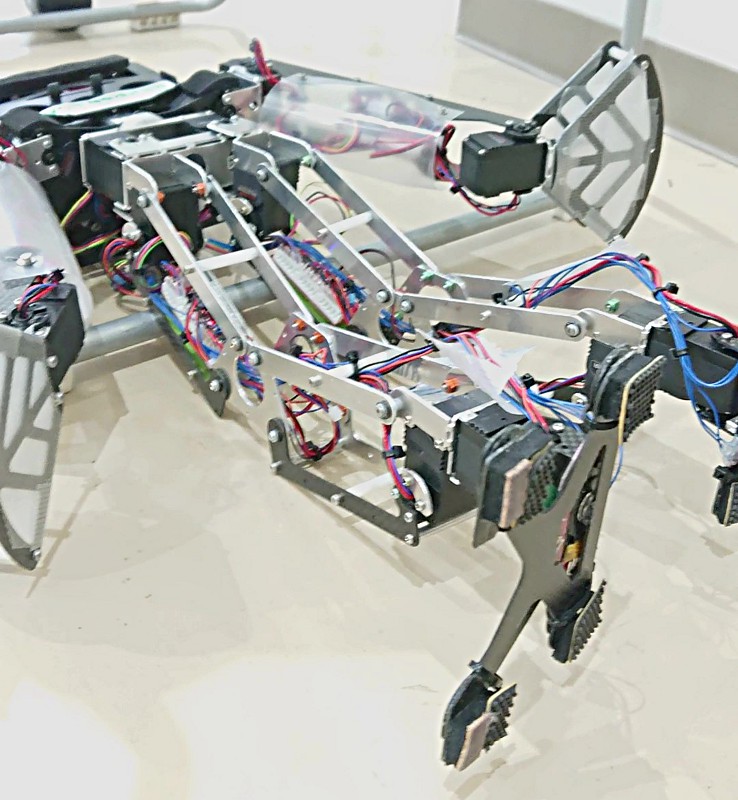
というわけでメカから作っていきます。

はいできました。
他のロボットから見よう見まねでなんかそれっぽいのを作りました。
足が人間とは逆関節になってます。
・以下余談
人は一般的に最強を目指したくなる[要出典]のですが、残念ながら我々は超天邪鬼なので、普通の戦い方では納得できませんでした。そこで、何を思ったか当時の我々は
「強いエアシリンダでぶん殴れば一撃で倒せるじゃん!!!」
と考えました。
我々机上の空論をこよなく愛する者達、机上の空論主義者の会にとって、空圧導入程度の減量は朝飯前です。
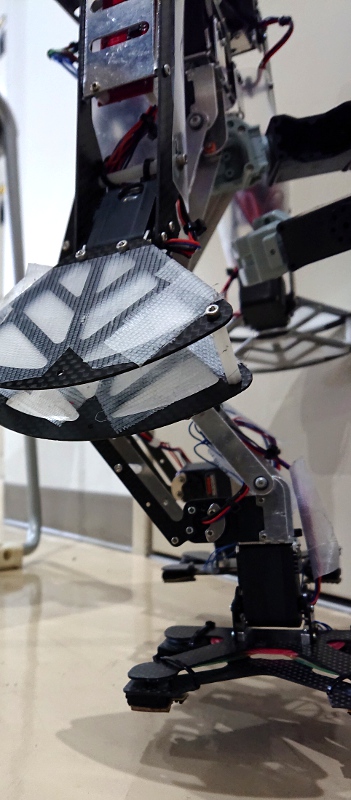
大正義Carbon Fiber Plateを外注したことで、全体の軽量化と脚の慣性減少を行いました。
これで構造材の重量が約半分になり重量規程に収ま……ったのですが、歩行時のバランス問題や外注後の設計変更によるアルミ部品によって、ぎりぎり1kgを超えました。
この時期になってようやく、最大の敵が対戦相手ではなく作業可能時間であることに気づきました。(訳:大会までにCarbon Fiber Plateの再外注が間に合わなかった。)
というわけで、泣く泣く空圧部品を外し機体が出来上がりました。(なんだこのオチ)
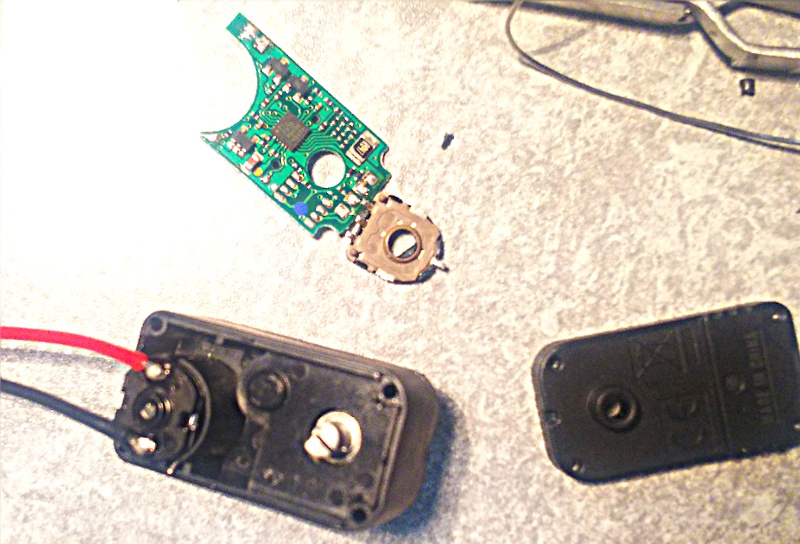
■攻撃/姿勢を計測しよう
ぶん殴られても倒れない為には、まずはぶん殴られっぷりをロボットが知る必要がありますね。
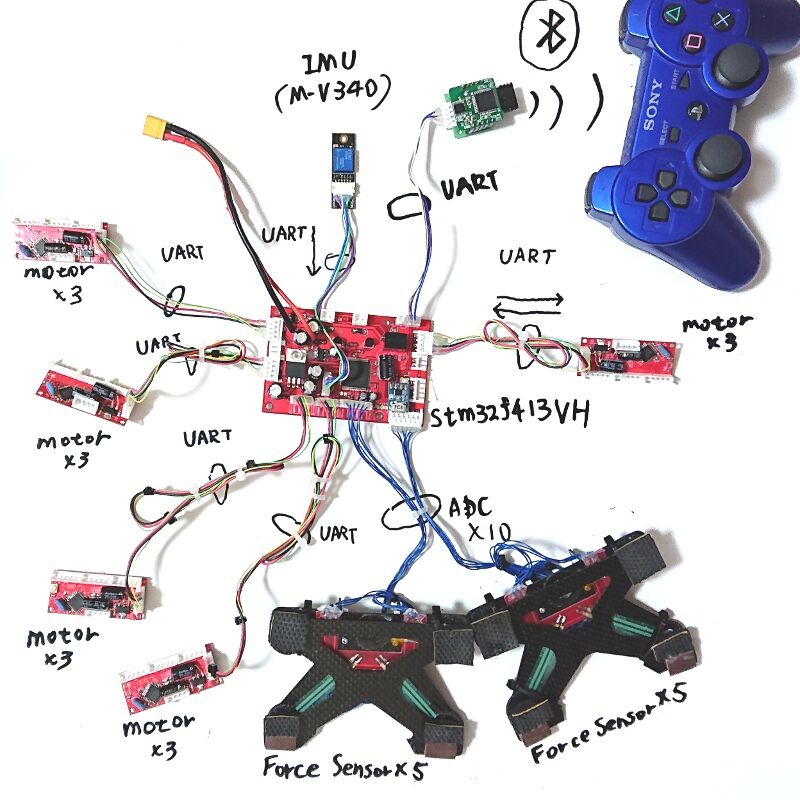
加速度と角速度のセンサ情報を使ってこれを実現します。
エプソンはプロジェクタやプリンタ等で有名ですが、高精度な水晶MEMSジャイロを搭載したIMUも生産・販売しています。

このセンサは、
・小型・軽量で重量制限に優しい
・精度が良い
・加速度・角速度のレンジが丁度良い(±5.8G、±450deg/s)
・最大1000Hzのサンプリング
・キャリブレーションが楽(コマンド送信で一発)
・回路的に楽(3.3V、UARTも対応)
という白馬の王子様仕様です。特に今回は限られた時間の中で如何に完成させるかというタイプの修羅場であるため、回路面・ソフト面で躓かないことは非常に重要でした。
とりあえずセンサを機体に乗せて付属のGUIでぐぐぐい~っとやってみます。
ぶん殴られっぷり、なんか読めそうな気がしてきましたね!
購入については、学生ロボコン時代からお世話になっており、今回の開発でもご協賛いただいたタクミ商事株式会社様が個人への少数個の販売にも対応しています。この度はありがとうございました!
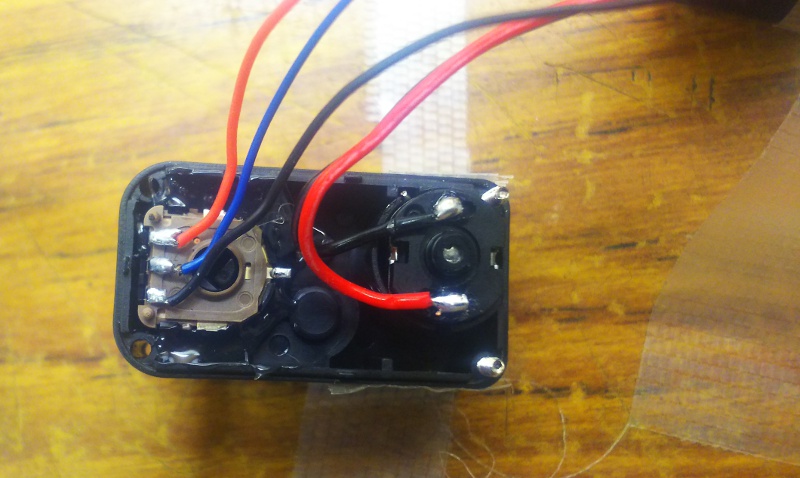
■バランスを保つ
この機体は重心が高く、ルール上、足裏のサイズが相対的に小さいです。
その結果、考えなしに歩くと地味に揺れます。
というわけで足裏に力センサを並べて、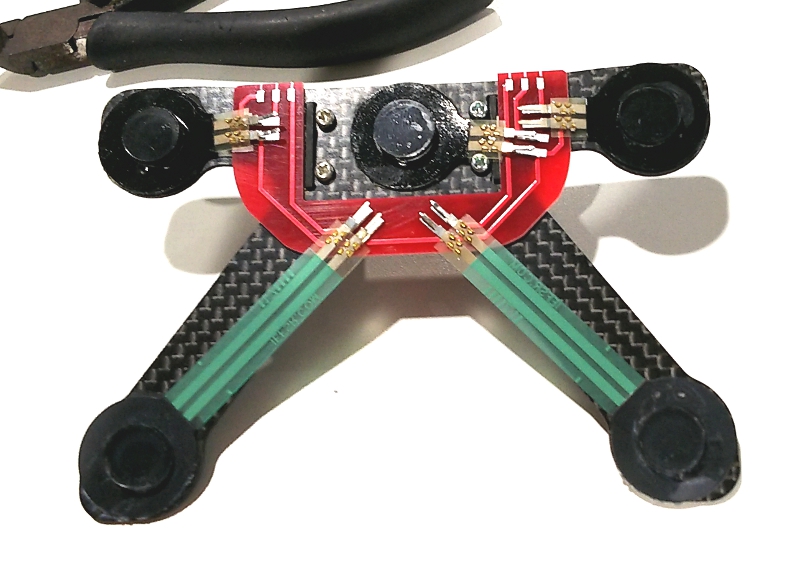
いい感じに重心移動することで揺れを抑えます。
制御なし↓
制御あり↓(機体の足先に注目)
これで歩行時も安心ですね。
■素早く移動する
次にロボットの運動性能を高めていきましょう。
鈴木は石鹸で手を洗っただけで筋肉痛になったことがある級の致命的筋力の持ち主なのですが、せめて自分の製作物にはそんな思いをしないで力強く生きて欲しいです。
ということで自己責任でサーボモータのモータとポテンショメータを、
乗っ取ります。
自己責任で定格7.4VのサーボモータにLiPo4セル(16V強)を投入。
最後に自己責任で二自由度制御(制御周期4ms)かけて、

自己責任で足が早く動くようになりました。この間0.15秒。
ロボットにはチームOBの@yuqlidさんに設計していただいた小型のモータドライバ基板を搭載しました。ありがとうございました!
折角なので萌え四コマ構図のひとつ、通称「きららジャンプ」をさせてみました。これで実質日常系。
ちょっと速くて何も分からなかったのでスロー再生(1/8倍速)。
身長の約半分、200mmくらい跳べています。これは完全に鈴木の運動能力を超えましたね。
■やってみた
というわけでこれらをまとめる中央の回路を設計して(通信とADCは全てDMAに丸投げ)、
なんかプログラム書いたら、
できたぞ!!!!!!!!!!!!!!!!!!!!!!!!!!
動画内では6回くらい連続で殴っていますが、なんとなくリカバリーできてそうですね。
もしかしたら2019年2月のロボットを殴った回数ランキングとかあったらそこそこ上位(1000位以内くらい)に行けるかもしれない。賞金首。
オマケ:最初の動画のフルバージョン
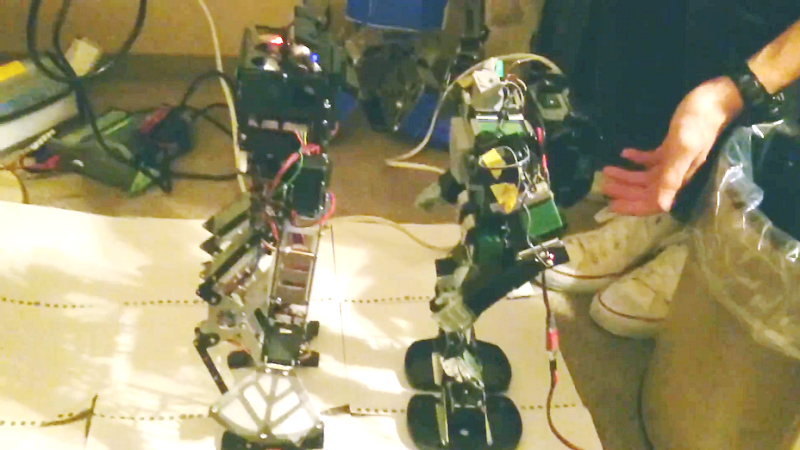
■他機体に殴られてみた(大会前日)
殴られても転ばない!!!!!!
それってつまり、負けないのでは? !? !!! !!? ?!? ! ? !
ということで、大会前日に電気通信大学ロボメカ工房の大会参加者の方々と偶然お会いできたので、『お願いです、殴ってください!』と懇願したところ殴ってもらえることになりました!!
ロボメカ工房の皆さん、その節はありがとうございました!
我々は1台しかロボットを持っていないので、他のロボットでデバッグできる数少ない機会です。
これで殴られて転ばなければ大体何とかなる!!!はず!!!!!!!!!
わははははは!!!!!!!!!!!ボクを殴るがいい!!!!!!!!!!殴れーーー!!!!!!!!!!!!!!!

ああああああああああああああああああああ!!!!!!!!!!!!!!!!!!!!!
~起こったこと~
ガッ
グイッ

バターン!!!
Ω\ζ°)チーン
想定していた攻撃は水平方向だったのですが、高めに設計した身長が絶妙だったために相手の全ての攻撃が股間へのアッパーと化してロボットが上方向に吹き飛びます。詰んだ……
ちなみに大会では対戦相手の棄権により3回戦に進み、そこで敗北しました。
■まとめ
・Robo-One Lightに出た
・修論を書いた
・股間にアッパーを食らったら誰だって絶命する
・M-V340は便利
これにて我々の学生生活はお終いです。我らがすずかけ技研も解散です。終了です。
二足歩行ロボットやRobo-Oneの難しさと面白さが見えるようになったところで、ぷっつりと終わってしまうのはやっぱり残念なものですね。
という長ったらしい寂寥感も一瞬で伝えることができるので、ダニング・クルーガー効果を是非覚えていってください。
現場からは以上です。それではみなさんさようなら。