皆さんこんにちはAssist研の15みやたです.
今回は僕が開発に携わっているロボットハンド,通称Avatar Handを紹介します.

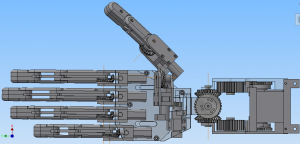
全体像はこんな感じ.人の手と同じくらいの大きさです.

各指の内部にはリンク機構が組み込まれており,根元の関節を曲げることで先端の2つの関節も連動して曲がります.
これにより,根元に搭載されたモータ1個で指全体を動かせます.
![]()
また,指同士の間隔を広げる機能も備わっており,人の手に近い動きが可能です.
実際に動かした様子がこちら↓
Avatar Handがようやく動きました! pic.twitter.com/YKFEIH80bJ
— みやた (@nozapu314) October 5, 2018
現在はこのハンドに手首をつける等,改良を重ねています.
今年のMaker Faire Tokyoにも出展する予定なのでぜひ見に来てください!
