この記事はロ技研秋のブログリレー11回目の記事です。
皆さんこんにちは.Assist研のみやたです.
今回は自作したラジコンカーの紹介をしたいと思います.
コンセプト
このラジコンカーを作る際に考えていたコンセプトは以下の通りです.
– ミニ四駆くらいの大きさ
– 自動車のような4輪
– 無線で操作可能
自動車のような4輪にするため,前輪にアッカーマンリンク,後輪にデファレンシャルギヤを搭載しています.また,ESP32というマイコンボードを使うことで,スマホから簡単に無線操縦できるようにしています.ここからはそれぞれの要素について説明していきます.
アッカーマンリンク
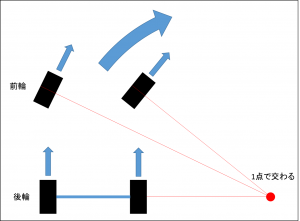
アッカーマンリンクは自動車の前輪のステアリングに使われている機構です.自動車のすべてのタイヤが横滑りをせずに転がるには,下の図のようにすべてのタイヤの回転軸が1点で交わる必要があります.
これを機構的に行ってくれるのがアッカーマンリンクです.アッカーマンリンクを近似的に設計できる手法はいくつか存在していますが,今回は最適化を用いてより理想に近いアッカーマンリンクの設計を行ってみました.細かい説明は省きますが,リンクの寸法を設計変数,アッカーマン関数との誤差を評価関数として,ニュートン・ラフソン法を用いてMATLAB上で解きました.得られた結果がこちらです.
すべてのタイヤの回転軸がちゃんと1点で交わっているのが分かります.得られた寸法をもとに実際に作ったものがこちらです.


いい感じですね.
デファレンシャルギヤ
デファレンシャルギヤ(以降デフ)は自動車の後輪の速度を調整するために使われている機構です.自動車が曲がるとき,下の図のように外側の後輪は内側の後輪と比べて長い距離を転がります.
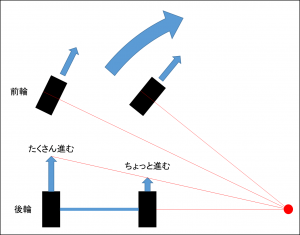
そのため,2つの後輪をただの軸で固定してしまうと回転数の違いによって滑りが生じてしまいます.この問題を機構的に解決できるのがデフです.デフにもいろいろ種類がありますが,今回作成したのは傘歯車を4つ使用するタイプです.
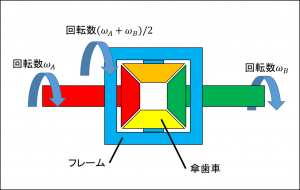
左右の軸の平均回転数がフレームの回転数になります.これにより,左右のタイヤが滑らないように回転数が自動的に調整されます.実際に作ったものがこちらです.
うまく動作していますね.
ESP32を用いた無線操縦
ESP32はArduinoIDEで開発でき,BluetoothとWifiが使えるマイコンボードです.Blynkというスマホアプリを使うことで,スマホを簡単にBluetoothコントローラーとして使うことができます.実際のアプリの画面はこんな感じ.

ボタンの種類や配置は自由にカスタマイズできます.ArduinoIDE用のBlynkのライブラリが存在するので,それを使えばプログラムも簡単に書けます.
できた
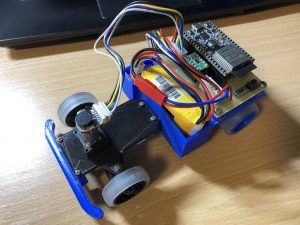
完成した機体がこちらです.
実際に動かしてみた様子がこちらです.
スマホから操作できるラジコンカーが作れました.
今後はこの機体を使って自動走行とかできたら面白いかな~とか思っています.
(やるかどうかは未定)
