こんにちは。アクア研の20-yoです。
アクア研は8/27, 28で、2つの水中ロボコンに参加しました。
この記事は、そのうち、水中ロボットコンベンションinJAMSTEC 2022に参加した、turtlrasプロジェクトの進捗報告です。
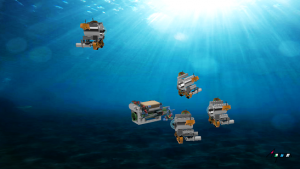
turtlrasプロジェクトは、今まで作成してきたアクア研の機体たちを水中から撮影する群ロボットをつくりたい、を動機に始めています。
理想としては、図の感じです。
被写体はiwatobiです。
今回とりいれた技術の要素は次のような感じです。
- ろうづけ防水容器
- マグネットカップリング(ハルバッハ配列)
- 可変ピッチプロペラ
- カメラの駆動機構
- 自作の防水グラウンド
- 回路基板の省スペース化
- openCVによる画像処理
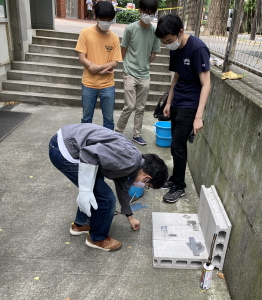
ろう付けは、アクア研の民等で練習会をしました。
ガスバーナーを使って、火事には十分気を付けながら行いました。
時には、可変ピッチプロペラをみんなで作る日を設けてやってみました。

動画提出直前に、(リーダーの無理強いにより💦)水中内の機体から撮影した動画内のLEDの検知を行いました。
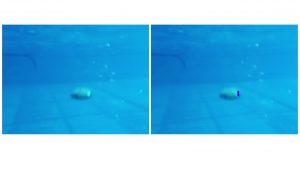
機体が動かなく、芳しい結果は得られませんでしたが、

今後は、スラスターの部分の改善、中に必要なモノを収められるように再設計し、社会問題にアプローチしながら、群ロボットとしての活躍を目指して進めていきたいと考えています!
