こんにちは。2018年入学の後藤(@goto_statement)です。
キャチロボに出場したチーム「ラグビーの亡霊」で、機械と電気を担当していました。
この記事では、キャチロボ出場機体「KIRIN」に搭載された直動回転差動機構について紹介したいと思います。前回の記事でチーム紹介や動作動画を掲載していますので、こちらもご覧ください。
この記事はrogy Advent Calender 2022 13日目の記事です。
製作した直動回転差動機構
こんなのを作ってました。(ツイートにはちょっと次回以降のネタバレが含まれますが、楽しみに待っててください!)
続いてエンドエフェクタを動かすための直動・回転の差動機構です。
重いモーターを機体後方に取り付けることでバランスを取ることを目的にこの形式を取りました。
二人でマックで30秒くらい話して思い付いた機構です。
設計者は@goto_statement です!#キャチロボ pic.twitter.com/4n6lFC2qcK— たくぽん (@takupon009) September 20, 2022
この動画で伸びたり縮んだりくるくる回ったりしている機構、これを「直動回転差動機構」と呼んでいます。
直動回転差動機構とは
機構の説明をする前に、まず言葉の説明をしたいと思います。
- 直動機構:直線状にまっすぐ動く機構
- 回転機構:回る機構
なんか当たり前みたいな説明ですが、直動機構という言葉に聞きなじみが無い人もいるかと思い、説明してみました。よく「レール」とも言われますね。回転機構は、ここではロボットアームの関節やタイヤなどを指しています。
差動機構(差動装置)とは、次のようなものです。
2種以上の機械部品のそれぞれの運動の差または和を取り出して一つの部分を動かす装置(差動装置とは – コトバンク)
今回作った直動回転差動機構は「運動の差と和を取り出すことで動作する、直線状にまっすぐ動く機構と回る機構が合体した機構」ということになります。
機構を思いつくまで
なぜこの機構にしようと思ったのかを説明します。
キャチロボをやる!となったあと、まずメンバーで集まって、どんなロボットにするか考えました。そのあと、機械担当のたくぽんと私で、秋葉原のマクドナルドに行って、もう少し詳細にロボットの機構を考えました。そのときに描いていたスケッチがこれです。アイデアスケッチなのでまあ汚いですね。
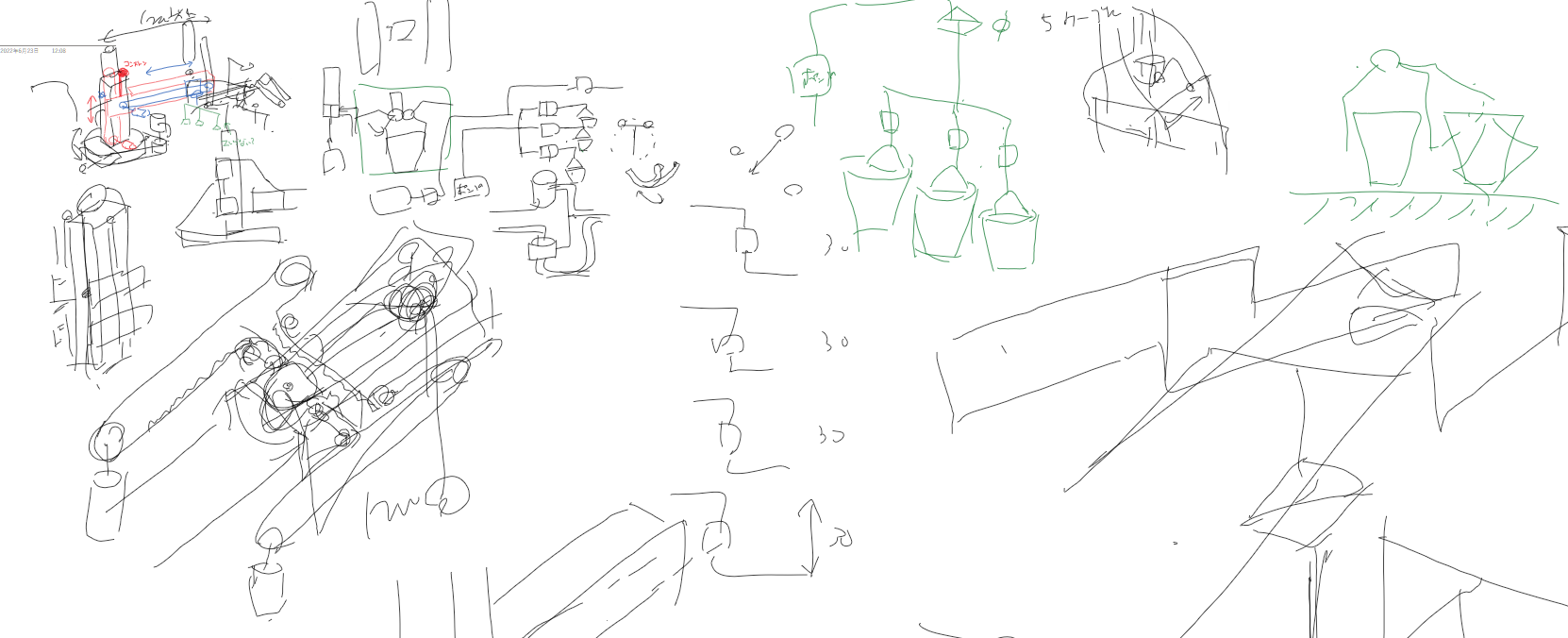
さて、まずこの図がロボットの全体に関するアイデアスケッチです。
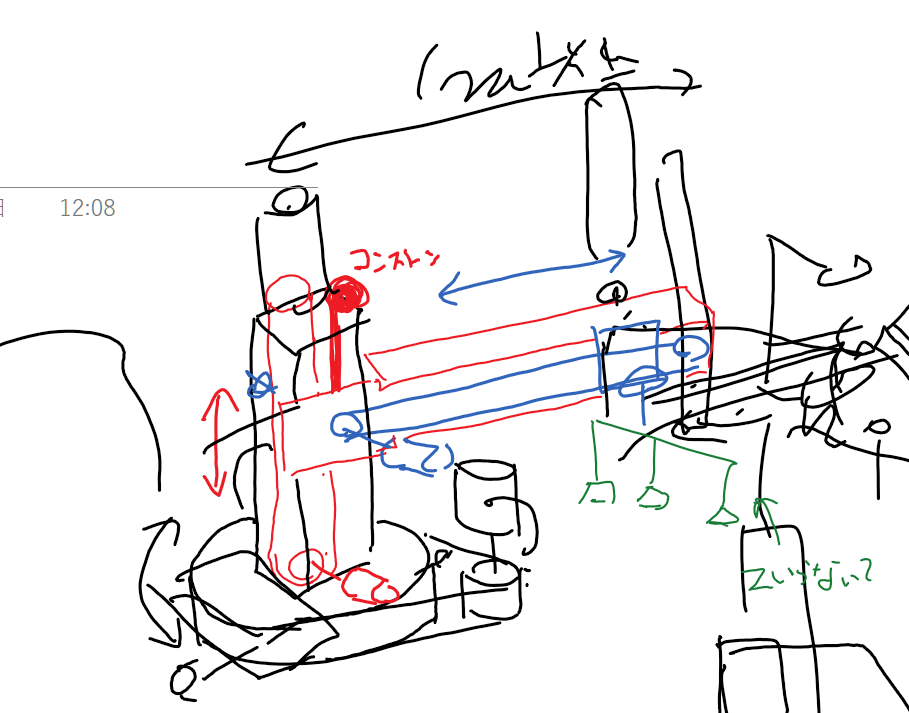
じゃがりこを持つ「手先(エンドエフェクタ)」をどのように動かすか、ということが議論の焦点だったのですが、それは次のようになりました。
- 長いレールに手先を付けて、レールの動きとレール自体を土台で回転させることで大きく移動させる
- じゃがりこを掴む場所と置く場所に対して手先の角度を合わせるため、手先付近でも手先を回転させる
ただ、ここで2の「手先付近での回転」をするために、直接そこにモーターを置きたくない!という話になりました。もしそこにモーターがあった場合、モーターという重たいものが土台から離れた位置にあり、しかもそれをモーターで動かさないといけない、という良くない状態となります。
そこでたくぽんが「なんか差動機構とか使って土台の真上に2つモーターがあるようにできないかな」とつぶやいたので、「こんな感じならできるのでは?」と私がこんなものを提案しました。
このやりとりが、先ほどのツイートにあった「マックで30秒で思いついた」と言われているやつです。
機構の解説
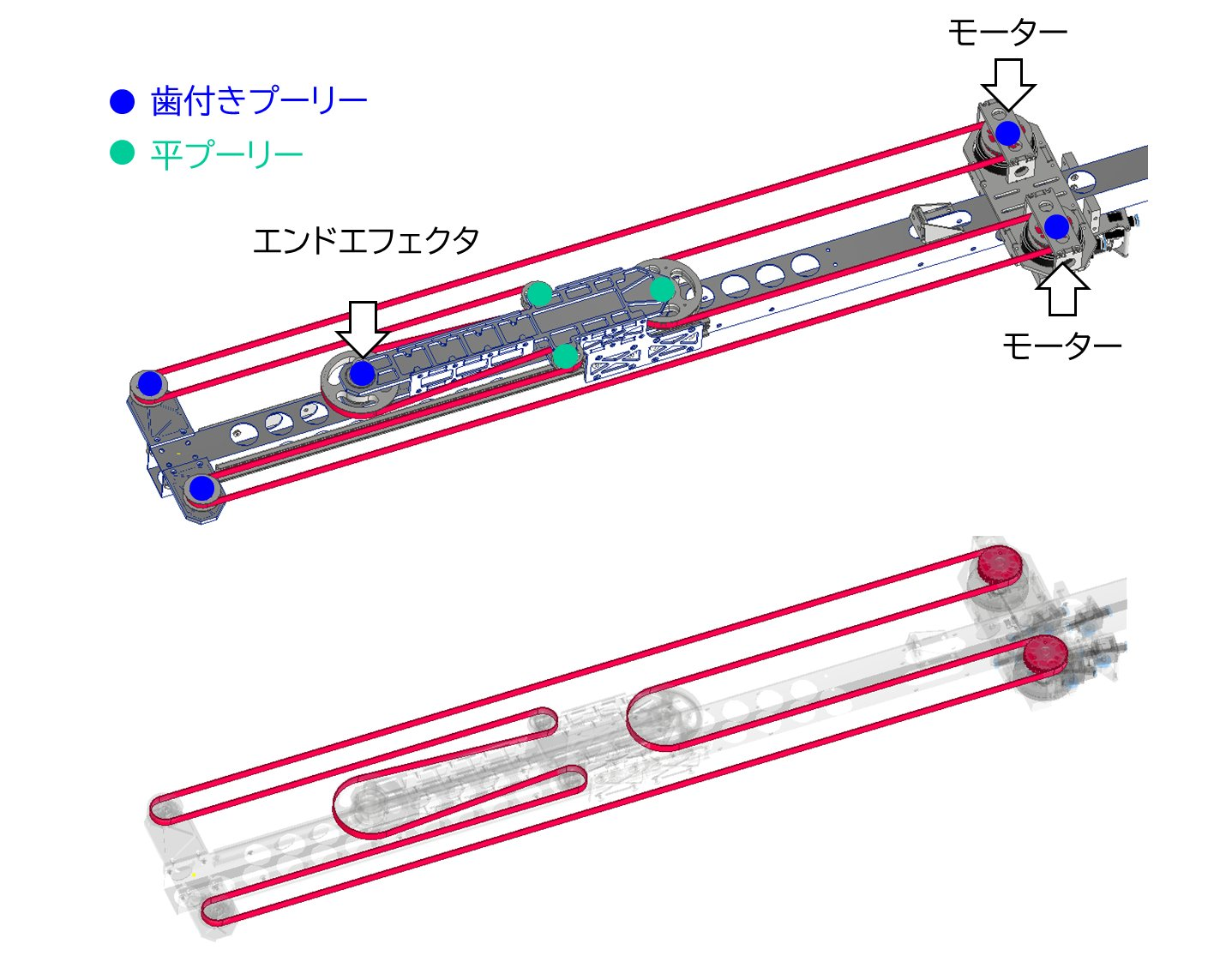
上の図をもう少し説明してみます。
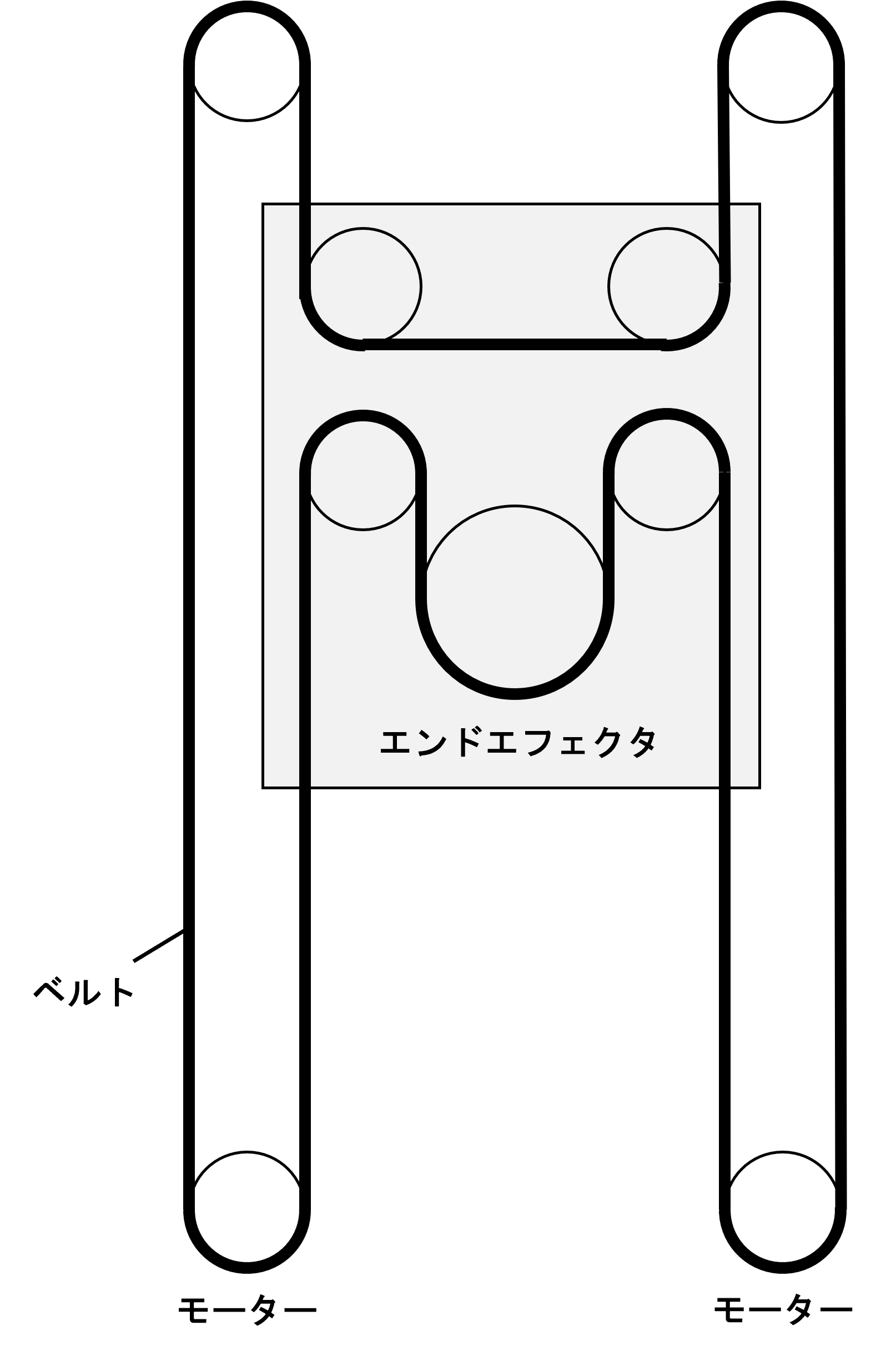
太線がベルト、円がプーリーを表しています。中央付近にある大きなプーリーにエンドエフェクタ(じゃがりこを掴む手先)がついていて、下側の2つのプーリーにはモーターがついています。灰色の四角の中にある5つのプーリーは相対的に動かないように、灰色の板に固定されています。灰色の板は上下に動くレールに乗っています。それ以外は土台に固定されています。
動いたときどうなるかを説明していきます。
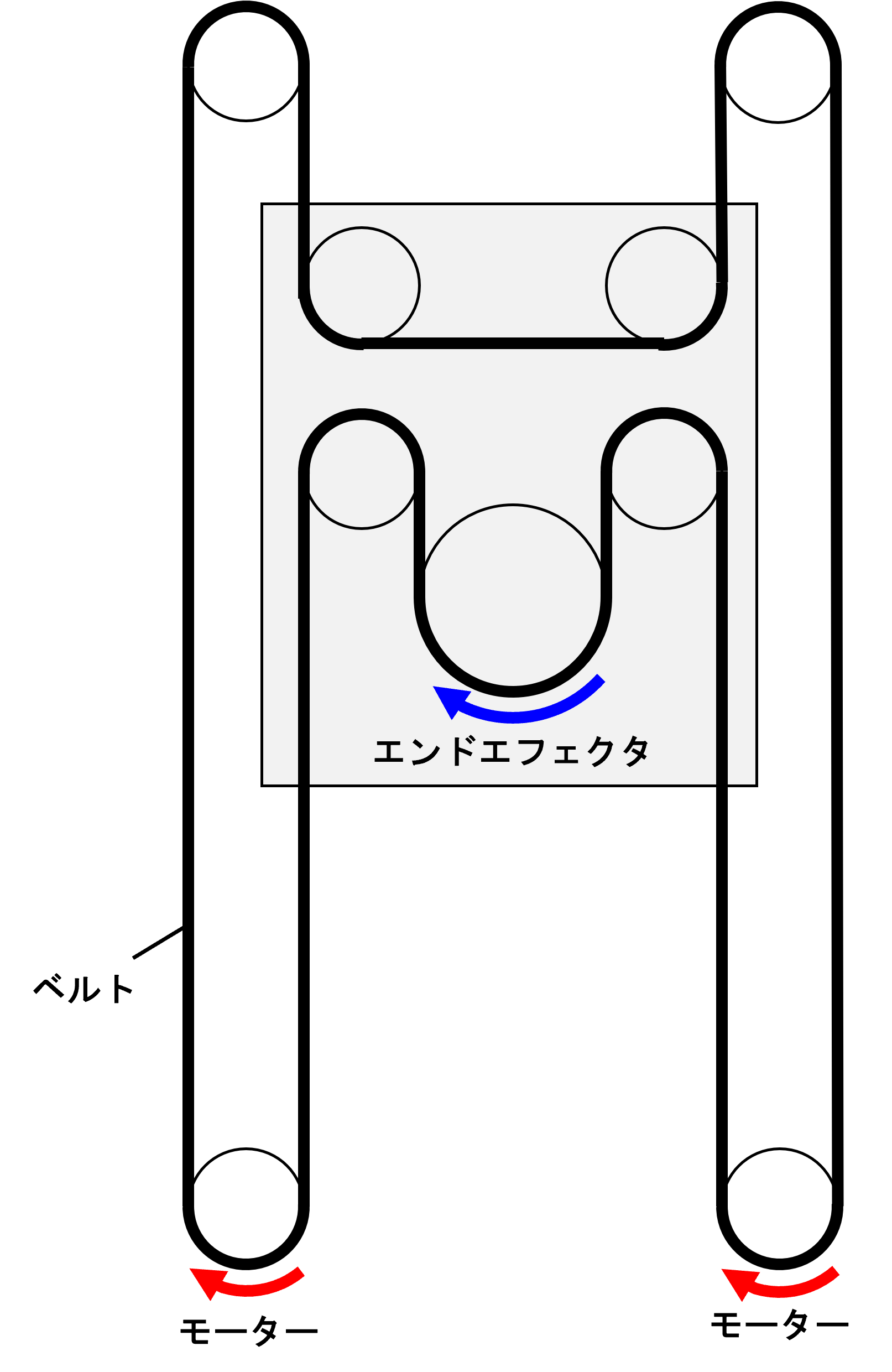
上の図はモーターを赤矢印の通りに動かしたときのエンドエフェクタの動きです。2つのモーターは同じ向きに回転しています。このときにはプーリーの位置は動かず、まるでベルトだけがくるくる動くような感じになります。よってエンドエフェクタは回転します。
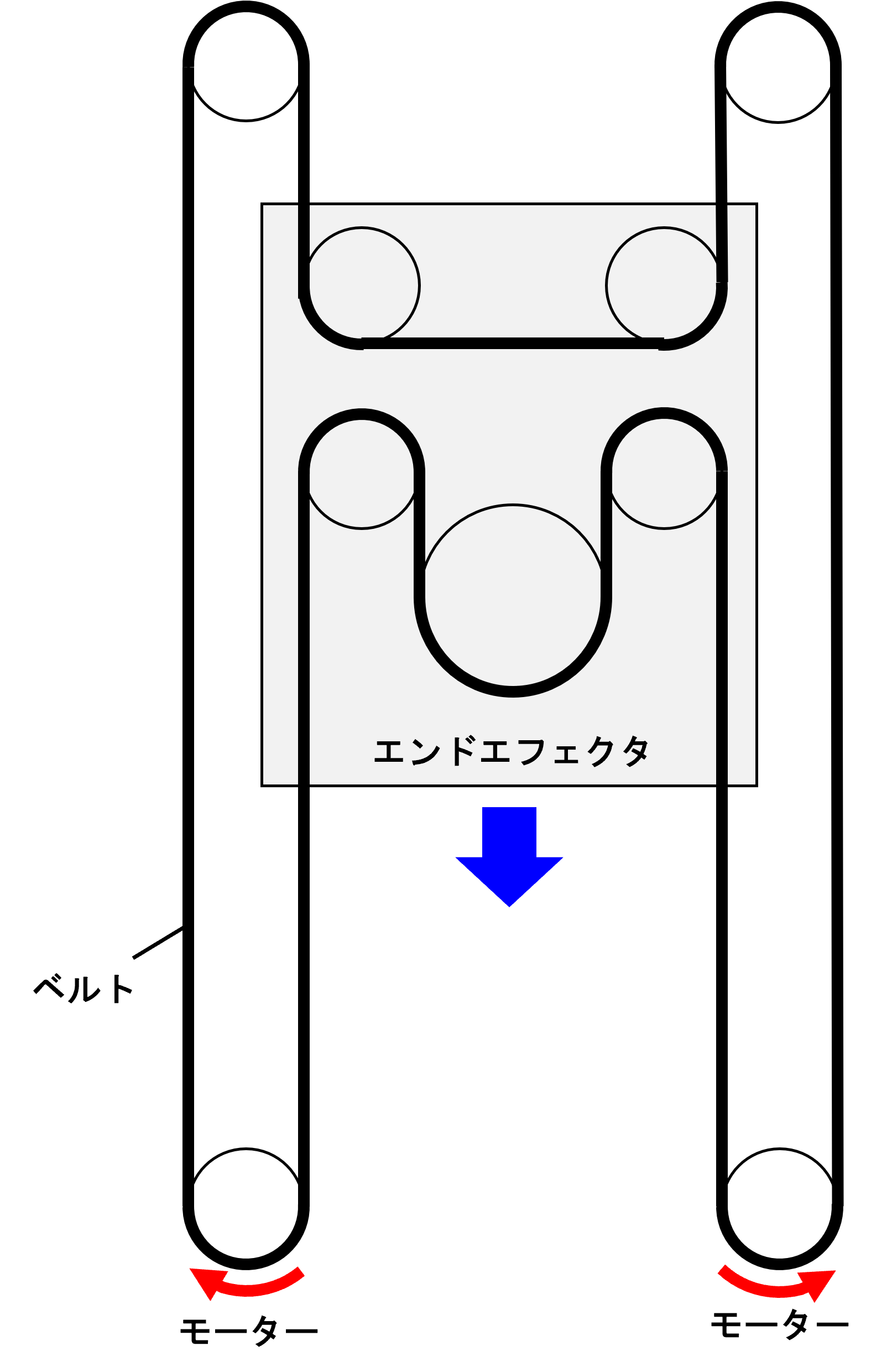
上の図では、モーターが別の向きに回転しています。このとき、エンドエフェクタが乗っている灰色の板が移動します。つまりエンドエフェクタは直動します。
動きは下のようにまとめることができます。
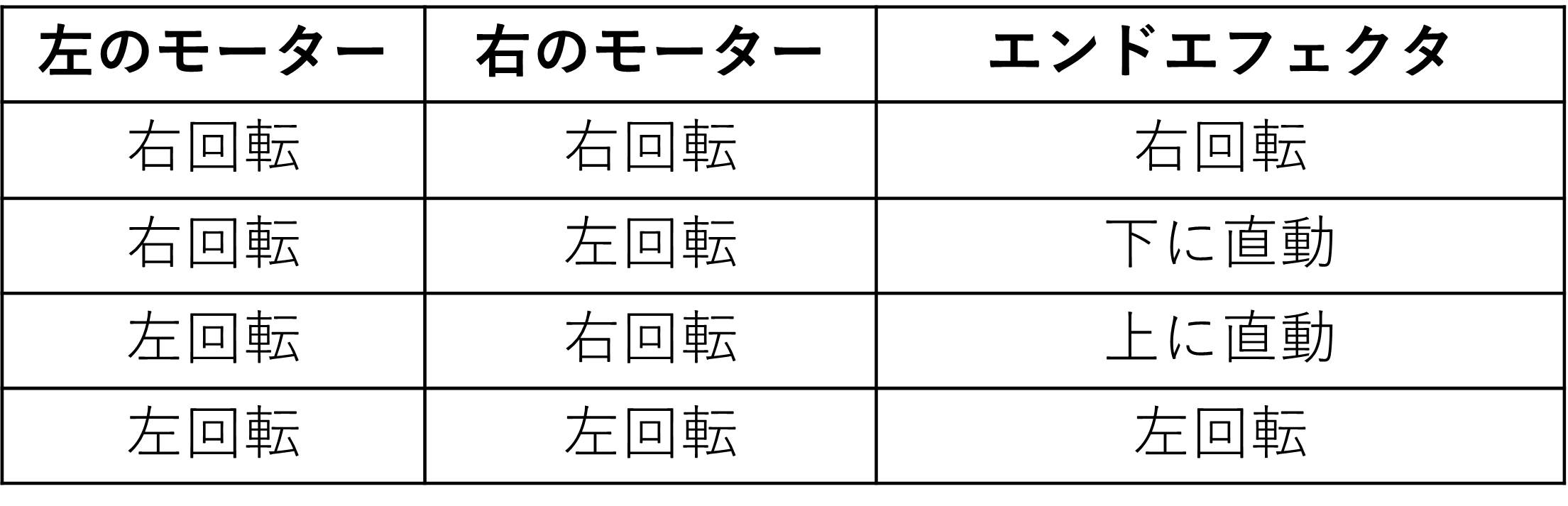
これは代表的なもので、例えば片方のモーターが止まっている場合、エンドエフェクタは回転と直動が混ざった動きをします。
KIRINに搭載した機構
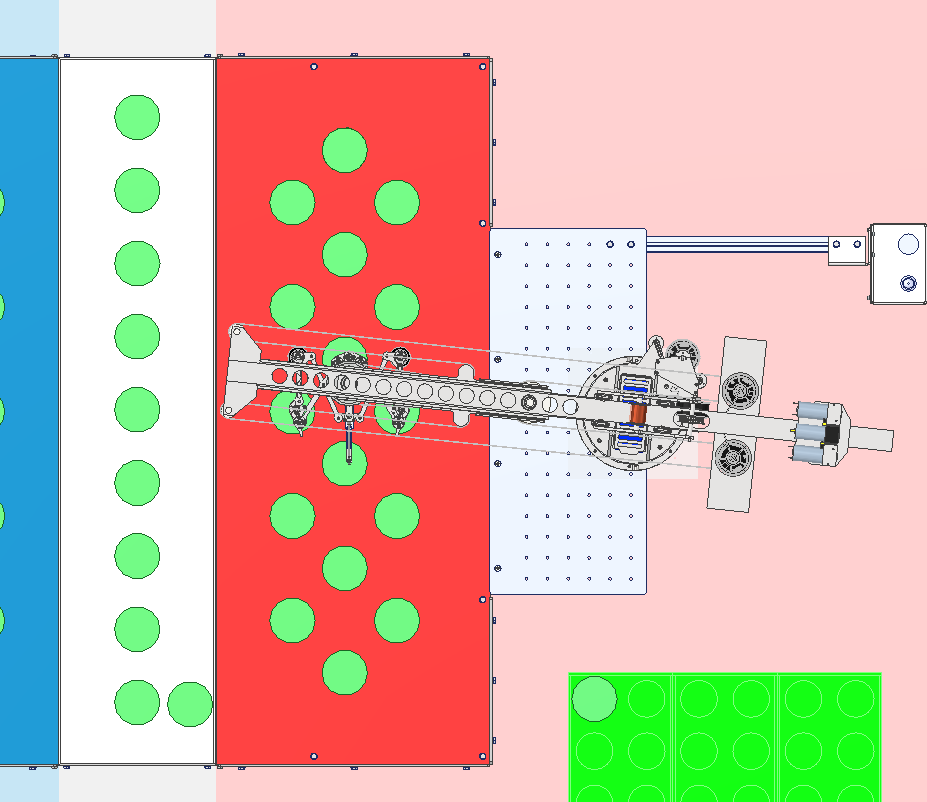
基本原理は前述の通りなのですが、KIRINに搭載するにあたって、プーリー配置などはいろいろ工夫しました。まず初期案がこちらです。
この設計の工夫点は、動くところや先端側に、たくさんプーリーを置かないようにした、という点です。しかし、共通エリア(白いエリア)のじゃがりこにアクセスするためにはレールの長さを長くする必要があり、その長さだと白いエリアに入らないと自陣を通過できなくなります(当たり前ですが)。大会のルール上、スタート時からある条件を満たすまでは白いエリアに入ってはいけないため、不利になってしまうことが分かりました。
これを解消しないことにはどうしようもないので、いろいろ改善案を考えました。「エンドエフェクタ付近にエアシリンダなどの別の直動を入れる」「もう1つベルトを用意して、エンドエフェクタがレールより手前に来れるように軸をずらす」などのアイデアを出しました。2つ目の案を眺めていたら、おぼろげながらこんな機構が浮かんできました。
この機構であれば…
↑白いエリアに入らずに通過できる!
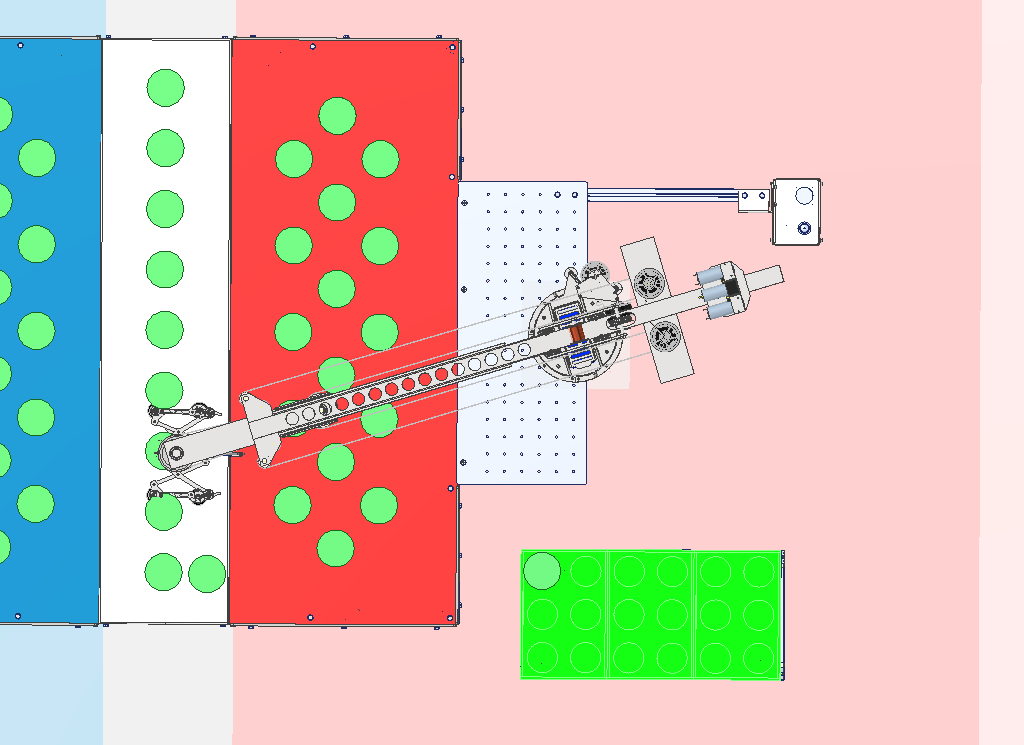
↑必要なときには進入できる!
思いついてよかったです!
使用した部品・加工
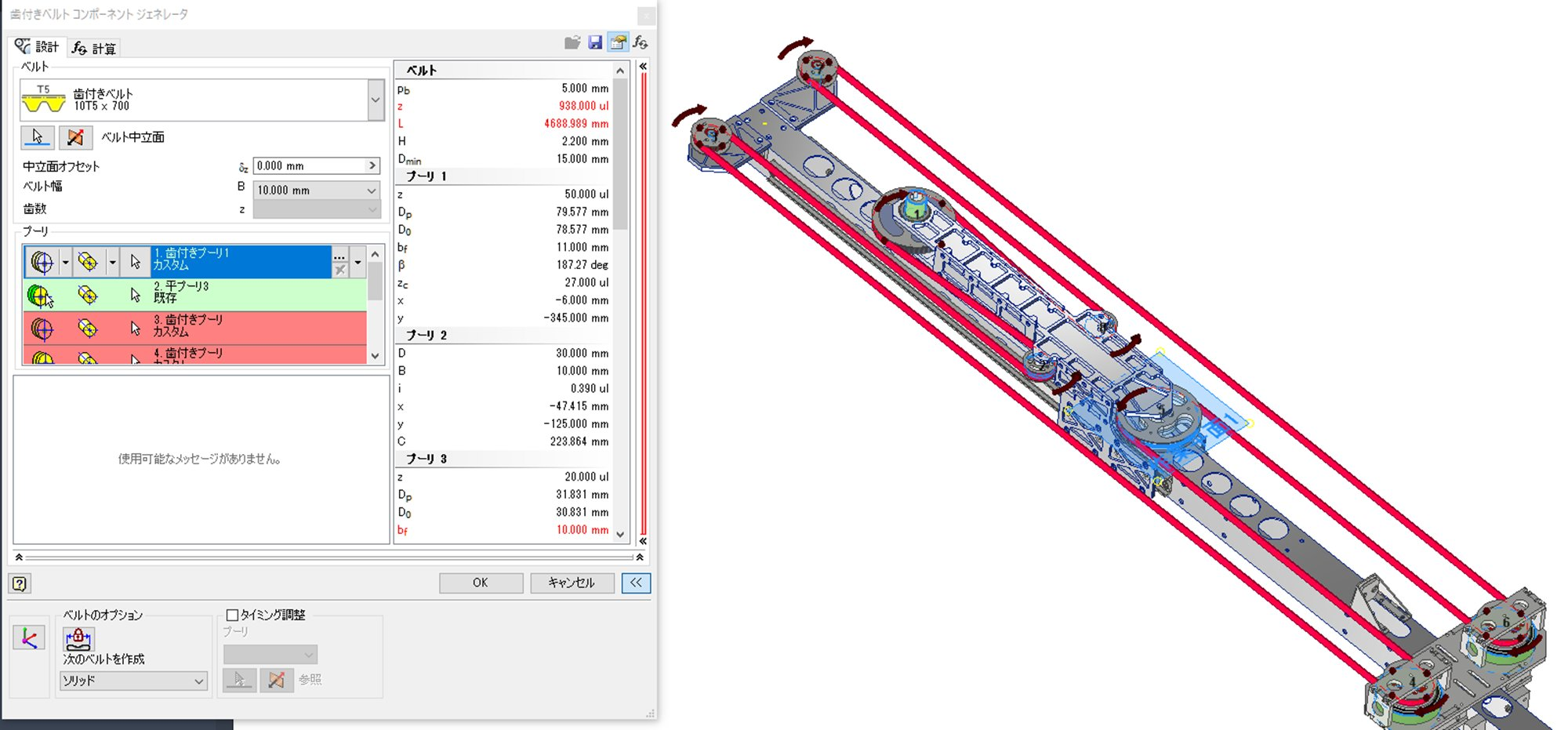
この機構の問題点は、ベルトがとても長くなってしまうことです。長いベルトを探すのには苦労しました。今回はミスミで取り扱っている搬送用タイミングベルト(ロングタイミングベルト)を使うことにしました。とても長いものまであるだけでなく、1歯単位で長さ指定ができるので、助かりました。

歯数計算にはInventorのベルト設計機能を使いました。初めて使ったのですが便利で良かったです。
次はレールについて。機械の直動部品といえばリニアガイドですが、これらはやはり高価ですし、長い棒の部分が鉄なので重いです。そこでローラー型のレール(R25-560L)を使っています。

プーリーについては、コスト削減と軽量化のため、アルミ板からCNCで削りだして自作しています。これは次回以降説明があると思いますので、お楽しみに。
その他、本体フレームはアルミ製です。肉抜きを頑張っています。


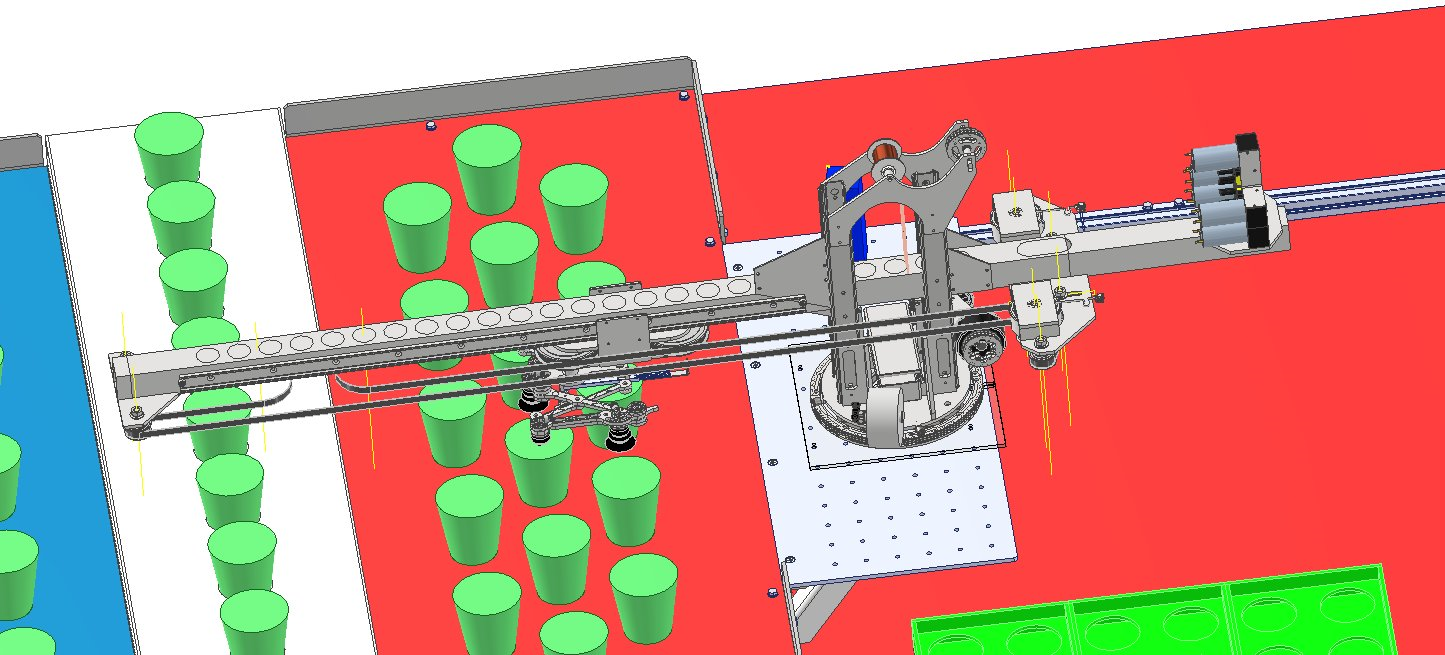
最後に機構をアップで撮影した動画を載せます。アルミを使いまくったメカメカしいメカをぜひ見てください。
#キャチロボ
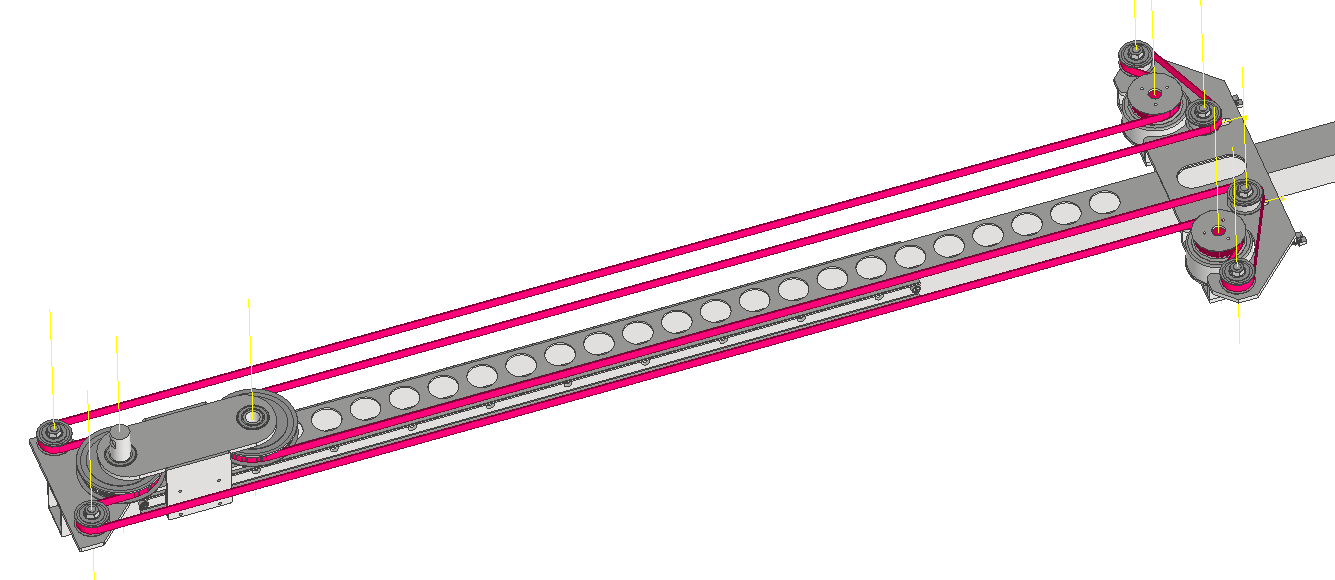
設計した直動・回転の差動機構、各部をアップで撮影してみました。
左右対称の機構で、黒いモーターが裏側にも1つ、計2つあります。4.68 mの長い一本の搬送用ベルトを使っています。
この機構とすることで、2つのモーターを中心近くに固定して配置できます。 pic.twitter.com/swThO0QUnL— GOTO STATEMENT (@goto_statement) September 21, 2022
いかかがでしたか?
機構設計って面白いなーと思ってもらえたら幸いです。次は回路に関して紹介したいと思います。
