この記事はrogy Advent Calender 2022 12日目の記事です。
みなさんこんにちは、18のたくぽんです。
この9月に京都で開催された、「第12回キャチロボバトルコンテスト」に参加してきました。サークル内の有志4人で集まり、チーム「ラグビーの亡霊」として出場しました。
まず結果ですが、大会では通信不良で試合時間の半分しかロボットを動かすことができず、予選17位で決勝リーグに進むことはできませんでした。
しかし審査員推薦でエキシビションへの参加が認められ、製作したロボットを披露することはできました!
これから約1週間かけて、キャチロボ出場機体の色々を記事にしていきます!今回は機体の概要と設計コンセプト回です。
キャチロボとは
キャチロボバトルコンテスト(キャチロボ)とは、京都製作所が主催するロボットコンテストです。「機械は人間の手を越えられるか?」をメインテーマに、様々なワークのハンドリングを競うコンテストになっています。
ハンドリングするワークがお菓子となっているのも特徴で、私達が出場した12回大会では「じゃがりこ」がワークとなっています。
詳しくはキャチロボHPをご覧ください。
参加経緯
今回のキャチロボ出場メンバーの4人は、全員がロ技研のNHKロボコン出場チーム「Maquinista(マキニスタ)」のOBです。私たちがメインの世代として活動していた2020年のロボコンのルールは「ロボラグビー」というもので、その名の通りロボットでラグビーをするものでした。しかし2020年頭からの感染病蔓延によりサークル活動ができなくなり、さらに大会も中止となってしまいました。

活躍の場が無くなってしまった私たちは、煮え切らない気持ちのまま引退を迎えます。そんな中、2022年6月12日、学生ロボコン2022の観戦に行くことになりました。
学ロボ観戦によりロボコン熱に火が付いてしまった私たちは、ロボコンを引退できなかった、成仏できなかった「ラグビーの亡霊」として今一度ロボコン界に蘇り、キャチロボ参戦を決意します。
↑これが6月12日の出来事で、キャチロボ参加申し込み締め切りが6月13日。7月頭にロボットの設計アイデアシート提出期限。ギリギリキャチロボ開発スタート!いえーい
競技ルール
フィールドに並べられているじゃがりこを回収し、シューティングBOXという穴のついた箱に入れていきます。制限時間3分間で、じゃがりこを箱に入れることで得られる得点を競います。
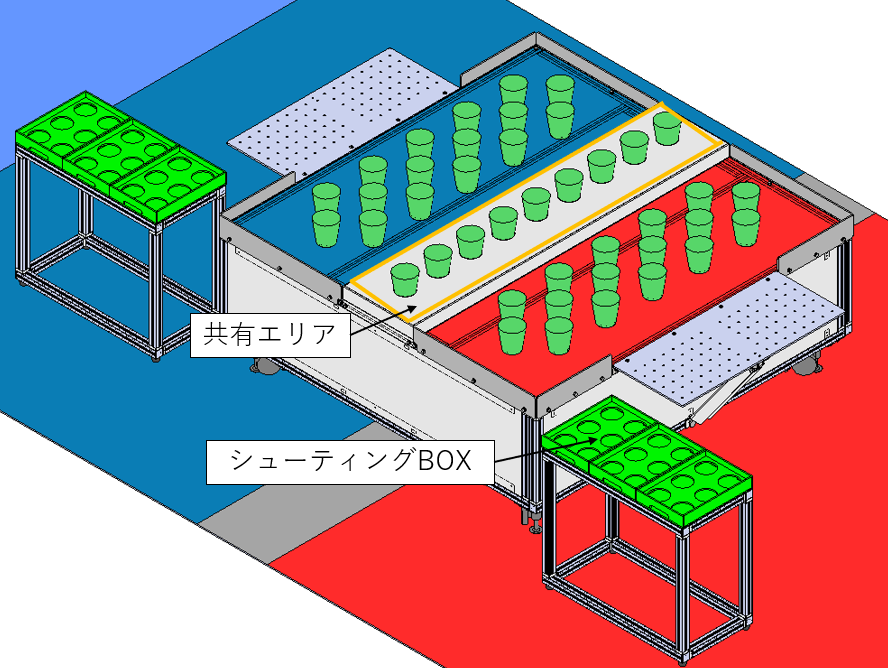
ポイント1 中央の9個のじゃがりこは相手チームと共通
フィールド中央の一段高いところにある9個のじゃがりこは、相手チームと共有のワークとなっています。自陣のワークを一つシューティングBOXに入れることで共有エリアに進入可能となります。相手に取られる可能性があるワークなので、素早く回収する・相手の回収を妨害するといった戦略を練る必要があります。
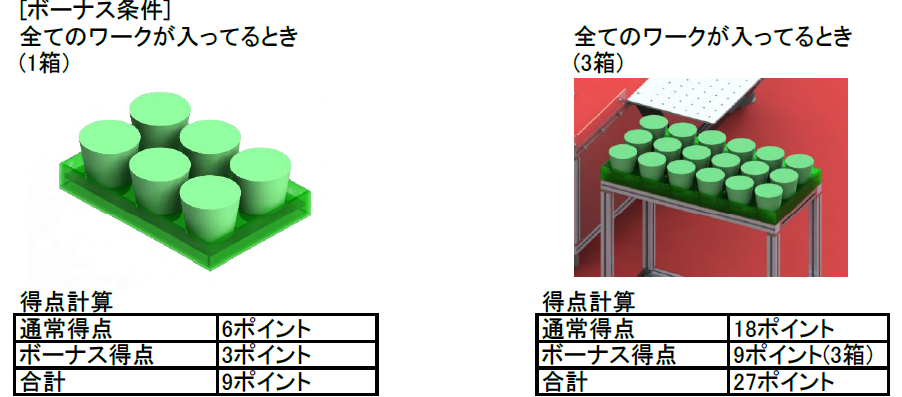
ポイント2 シューティングBOXの穴にじゃがりこを入れるとボーナス点
シューティングBOXには6個の穴が開いていますが、その6つの穴全部にじゃがりこを入れることができればボーナス点がもらえます。積極的に狙っていきたいですね。
製作したロボット
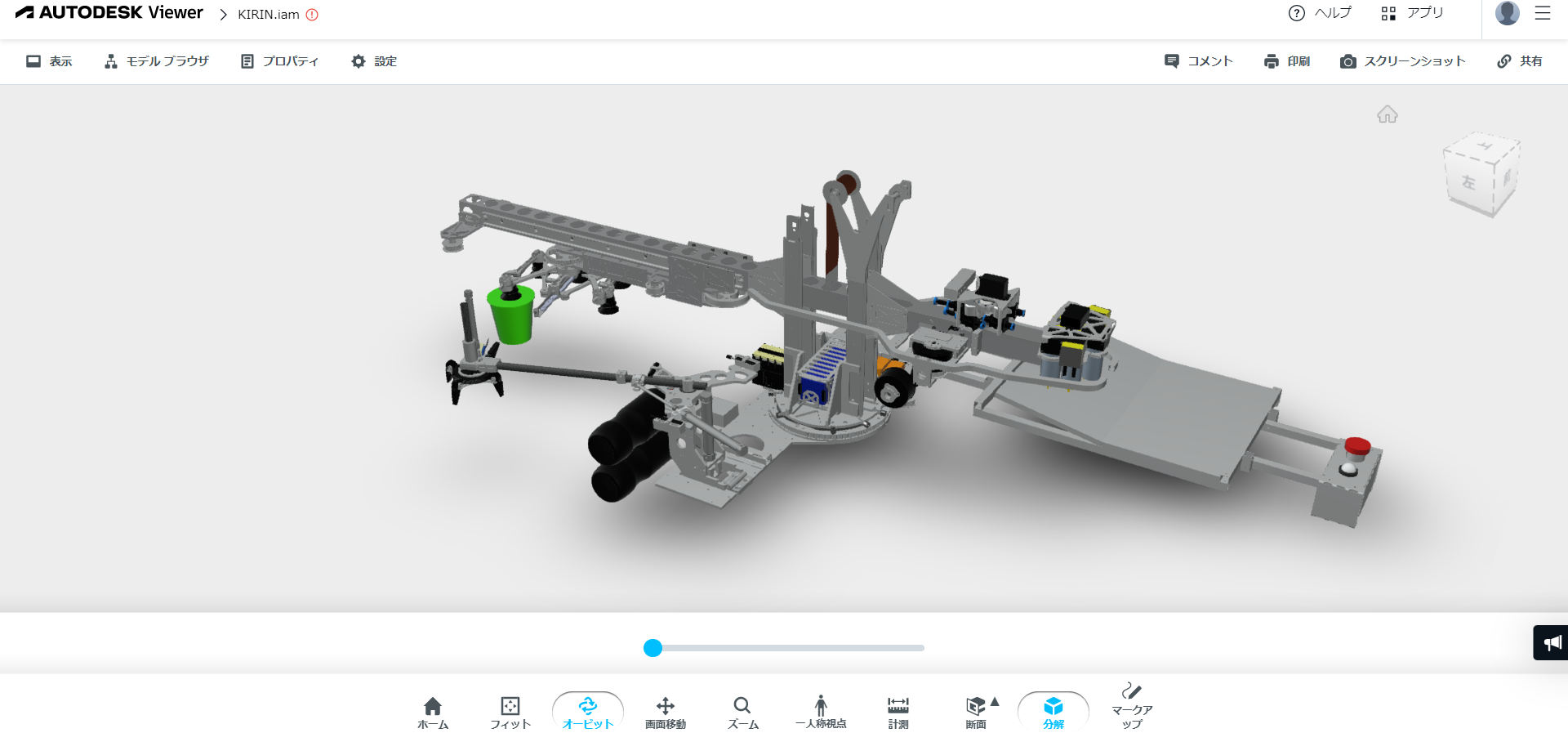
こちらが私たちの製作したロボット「KIRIN(きりん)」になります。
アルミの塊みたいながっしりしたつくりが特徴です。整備性向上のためにナットが一つも使われていなかったりします。

↓大会での試合の様子
↓工大祭での展示の様子
CADモデルもここにアップロードしました!視点を変えたり分解したりできるので興味ある方はいろいろいじってみてください。
詳細は今後別の記事で続々と書いていきますので、この記事ではなぜこのようなロボットになったのか、設計のコンセプトをお話しします。
コンセプト
大会出場チーム中(たぶん)最遅のエントリーをしたこと、メンバーの多くが大学院生であることから、作業できる時間に限りがありました。しかし、大会に出るなら勝ちたい。
ということで、無茶をせず堅実に、でも勝利できるコンセプトを考えることにしました。
勝利するためには相手よりも多くの得点を取る必要があります。そのために、以下の要求仕様が生まれました。
- 共有エリアのワーク9個のうち、過半数の5個をなるべく早く確保する
- ボーナス点を狙いやすい構造にする
これらの仕様を踏まえて、ロボットの構成を考えます。練習や調整の時間が限られることから、様々な状況に対応できるロボットアーム一つを主軸とし、時間があれば特定のワークに特化した別のロボットアームを追加するという方針で進むことになりました。
最終的には競技開始3秒でワーク1つをシューティングBOXに入れ、10秒程度で共有エリアのワーク5つを確保できるロボットに仕上がりました。この辺の詳細は今後のエンドエフェクタ機構記事などでもっと詳しく書く予定です。
今後の記事にも乞うご期待!
今週はロボットの機構・回路・制御についての記事が続々投稿されます!
お楽しみに!
