この記事はロ技研秋のブログリレー2020の記事です。
こんにちは。18-Thunderです。ロ技研秋のブログリレー2020ということで自分の所属するアクア研について書いていきます。
アクア研とは
知らない人もいると思うので研究室について紹介します。
名前にもあるとおり、水や流体に関することを対象にします。
水中ロボットだったり水上船を作ったりしてます。

ここ数年は例年夏に開催される水中ロボットコンベンションへの参加を目標にしています。
特定のタスクがあるわけでもないので、自由に技術を生かしていきます。
水中の自動機を目指して作ることが多いです。
水中ということで、地上で元気に動く機体も水没させれば(おそらく)お亡くなりになると思います。水中で元気に動かすために、本研究室では以下のようなことをしています。
- 回路などの防水
基板やマイコン、バッテリーなど、すべての電子部品は水が入らないように処理します。
お弁当箱や塩ビ管を使って密閉することが多いです。(基板をコーティングして直付けしたこともあるが)
右上がお弁当箱。マイコンや基盤が入っている。 左や下が塩ビ管。左はバッテリー、下はモーターが入っている。 配線のためのケーブルやメンテナンス時の開閉に気を付けます。
浸水センサーや緊急停止スイッチもあります。 - モータの防水
モーターは防水のほかに回転軸をどうするかを考えなければなりません。
大きく分けて2つの方法があり、軸を油などで覆う方法と非接触で回す方法です。
本研究室では磁石による非接触式が多いです。 - センサー
手動機なら人が見てやればいいですが、自動機の場合はセンサーで外部の情報を得る必要があります。
超音波センサーやカメラ、加速度センサー、ジャイロセンサーを使います。
ブイタッチやゲートくぐりなどのタスクが多いため、カメラで目標を認識することが多いです。
減衰の関係で画像だけではなく、深度を測るRealSense(出来た)や減衰の少ない音波を用いたソナー(実験中)で補助します。
カメラの水中画像 真ん中に青い風船があり、上はより水深が深い領域になる 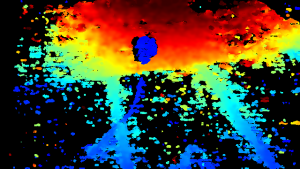
深度画像 風船の部分が青(近い)に、水深が深い部分が赤(遠い)になっている 制御にも絡んできますが、壁や床が常に使えるわけではないので真面目に自己位置を取ろうとすると大変です。
- 機体設計
船や水底走行機ならともかく、水中ロボットは三次元的に動くため、いろいろ考えることがあります。
例えば、機体の重心は下に、浮力と重力が釣り合うようにして、静止状態が安定になるようにすること、目的に合うスラスターの位置および個数を決めることがあります。
水の抵抗の影響を考え、進行方向に垂直な面を減らしたり、横や上から見たときに滑らかな楕円形なるようにしたりもします。
今年度の活動について
コロナの関係で前期は機体製作が難しく、構想、設計や家でできる作業をしていました。
水中ロボコンが12月に延期になったので、現在はそれを目指して機体制作に取り組んでいます。
今年は2チーム参加します。結果が出次第ブログにも報告します。





皆さま初めまして.
アクア研所属の無職のspanaです.
普段は流体計算とかをやっているのですが
今回は何をトチ狂ったのかadvent calenderの5日目の投稿用のネタとして3Dプリンターのみでハーモニックドライブっぽい何かを作りました.動画は張り付けがよくわからなかったのでtwitterに貼りました.申し訳ありません.
減速比は83/3しかないのであまりハーモニックドライブっぽくは見えないですが…
経緯
部室にいたらAdCをかけと言われたのですが,ネタがなかったため24時間で作りました.
このスピードは3Dプリンターならではですね.
あと加工はしたくなかったので,全く加工せずに作り終わるようにしました.さすが3Dプ(ry
ハーモニックドライブ is 何?
皆さんご存じの通り質量の割に高い減速比が得られたり,静かだったりするのでロボット屋さんに人気の減速機ですね.
詳細な説明は開発元のハーモニックドライブシステムズさんが公開されているここを見るのが早いと思うので見てください.
要は重要な要素は下記の三つです.この三つがちゃんと設計,製造できたらとりあえず動きます.
作ってみた
ウェーブジェネレータは本来楕円上のカムの外周に薄肉のボールベアリングをはめ込むのですが,それを再現すると部品点数が多くなるのでこのような構造にしました.

両端にベアリングをはめ,そのベアリングでフレクスプラインを変形させます.
寝不足で頭が働いていなかったためボールベアリングも3Dプリンターで作りました.とはいってもステーターとリテナーのみ出力して既製品の鉄球を組み合わせただけですがフレクスプラインは変形する必要があるので気を使う部品です.
3Dプリンターで一般的に使われる素材であるPLA,ABS,PETなどだと摩耗や繰り返し変形や剛性を考慮しなければならず面倒くさいので最近購入した軟性フィラメントであるTPUを使用しました.
TPUは独特な設計が可能となるので持っていて損はないですよ.
サーキュラスプラインはただの剛体歯車なので当然どうとでもなるので割愛します.
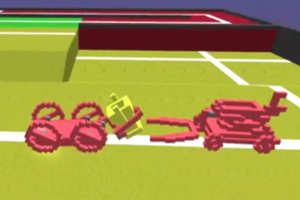
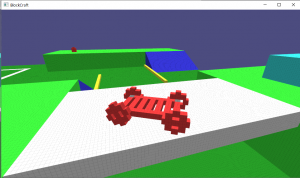
作製したものを組み合わせたものがこちらです.
微妙にフレクススプラインが楕円形に変形しているのが分かると思います.
回してみよう
組みあがったのでモーターとくっつけて回してみたのがページトップの動画です.

今回モーターを選定する時間もあまりなかったので適当に転がっていたモーターを使いました.
まあこのくらいのモーターはどこのご家庭の床にもころがっていますよね案の定ベアリングのガタがひどく異音を立てていましたそれと歯のかみ合いが悪く摩擦が大きかったですね.
まあ調整せずにすべての部品一発刷りなので,調整したら普通に回るようになると思います.
最後に
いかがでしたか.今回使用した部品はすべてflashforge様のadventurer3で出力しました.
最高の3Dプリンターとは言いませんが,15万円以下の3Dプリンターでは一番良いと思います.
公式様から7万円弱で購入できますので是非クリスマスプレゼントとして購入されてみてはいかがでしょうか?
(なおTPUは純正のフィラメントではありません.TPUを使用して不具合が万が一生じたとしても当方は一切関知しませんのでご了承ください)