あの、
鈴木です。修士2年です(Twitterは、やっておりません)。
最近、同期の仲鉢と2人で知能ロボットコンテスト2018 にロ技研の「szk^2技研」名義で参加したため、その報告を、します。
知能ロボットコンテストとは 毎年6月ごろに仙台で開催されるロボコン。小学生から社会人まで 参加してます。君も参加しよう。
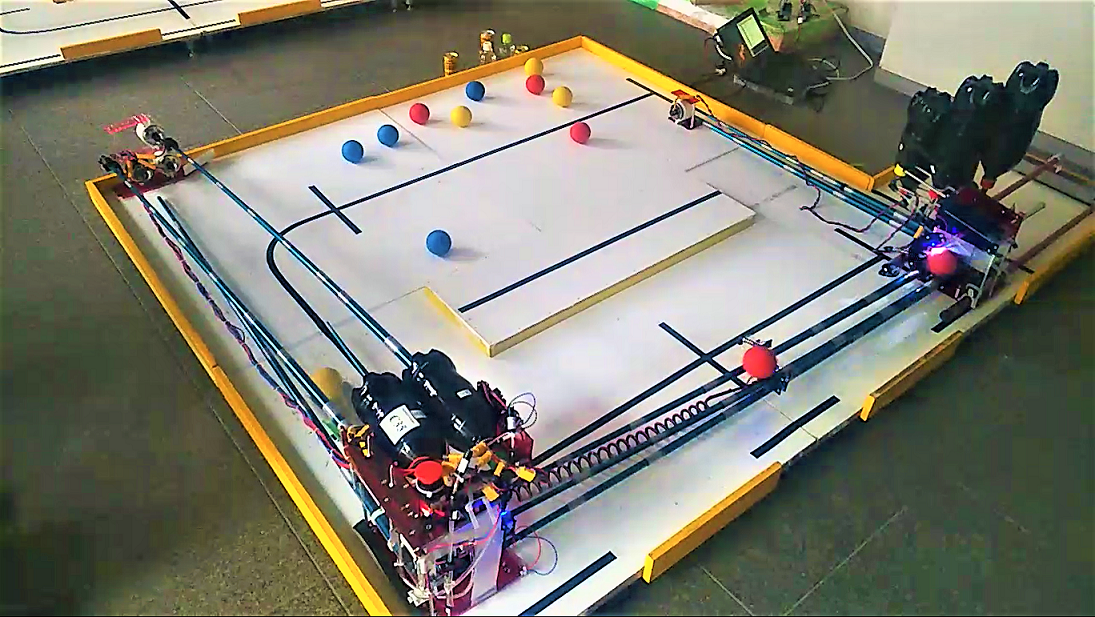
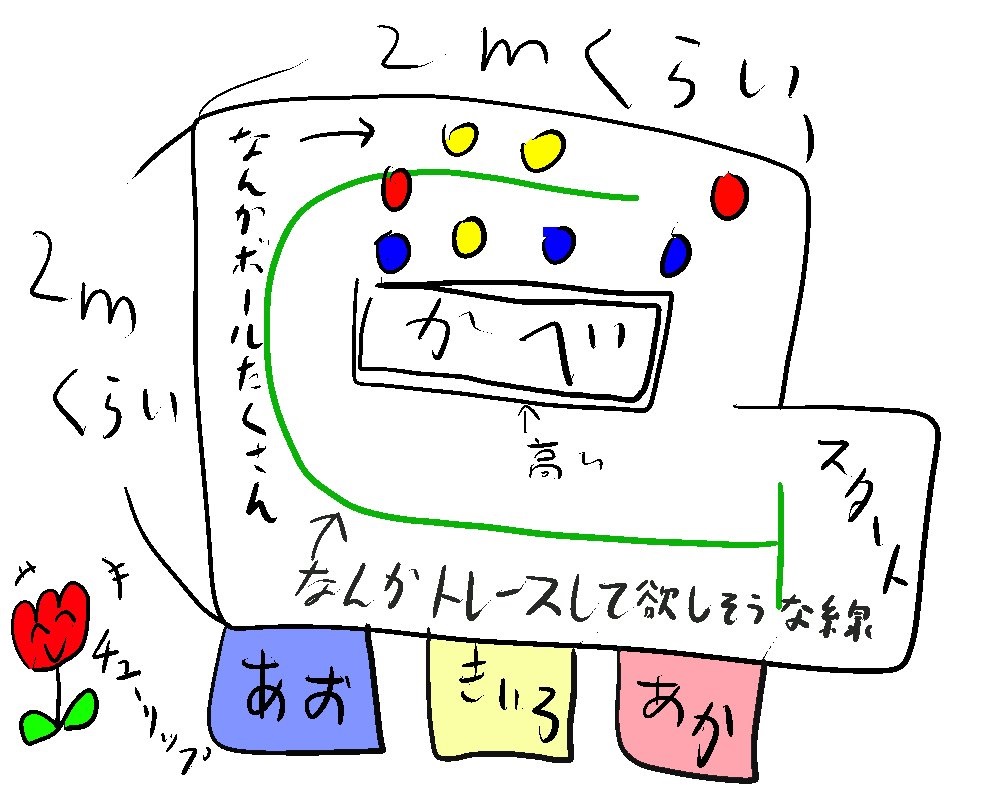
完全自動 のロボットが、ボールを集めて得点を競います。
液タブが手元にあったのでどんなルールか雰囲気が分かりそうな図を描きました。どうか察してください。
去年の動画を見ると雰囲気が分かるかも!
VIDEO
過去にロ技研の先輩も参加してます! 2008年にはロ技研出場の『丘の上のドラゴン』 (http://www.inrof.org/2008/irc/score/rinfo/robot078.html )がデザイン賞を、
また、2017年にはロ技研OBの方の製作した『えあ太郎』 (http://www.inrof.org/2017/irc/score/rinfo/robot109.html )が真田賞を受賞しています!
君も参加しよう。
とりあえずやってみたよ! らいんとれーす?とか、DCもーたー?とか?ちょっと、うーん?よくわからなかったけど、とりあえずやってみました!いえーい。
VIDEO
ましん情報
その名も、タイヤ絶対撲滅太郎先輩 です。
コンセプトは「最速満点」 です。なんかそんなに早くボール集めてもあんまり良い事無いらしい ですけど、その辺の大人の事情は鈴木にはよくわからなかったので、コンセプトは「最速満点」 です。うん(`・ω・´)ガンバル!
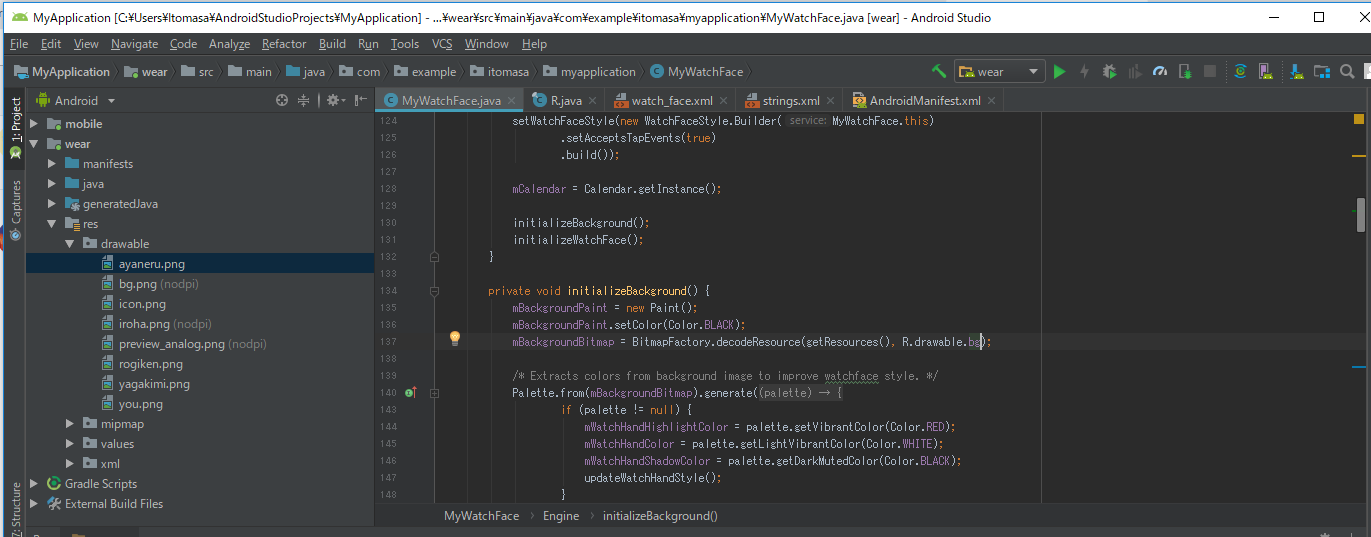
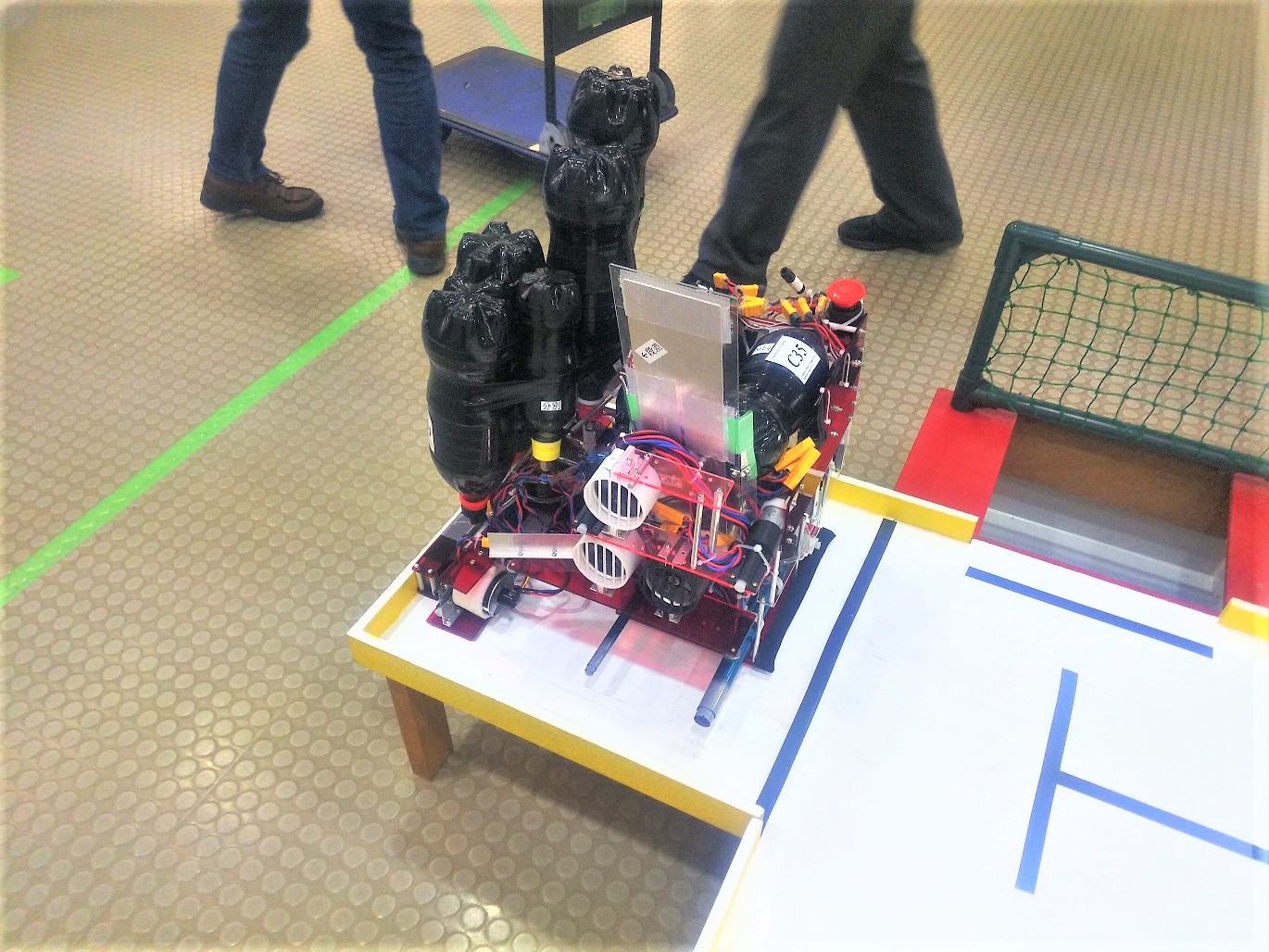
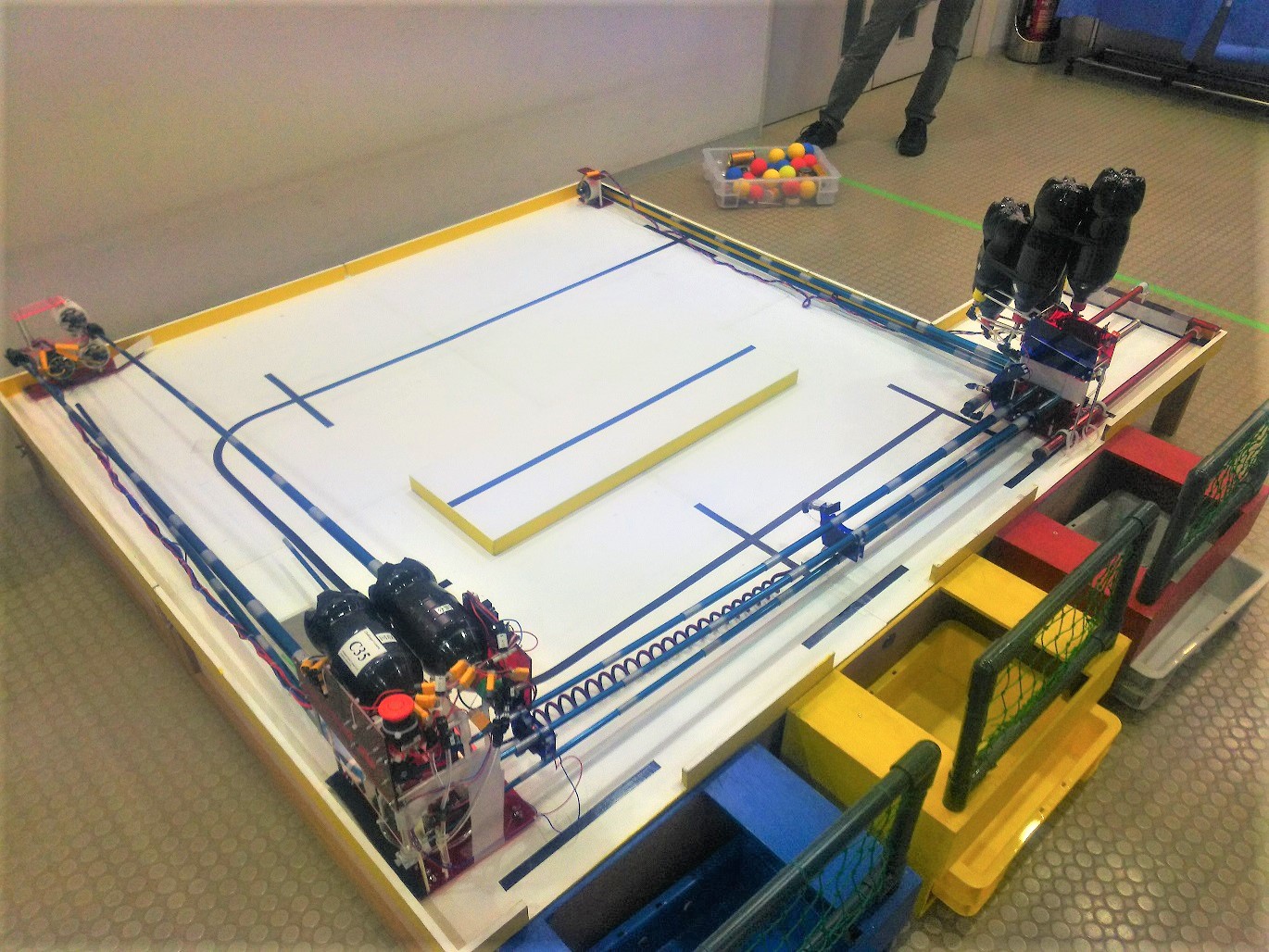
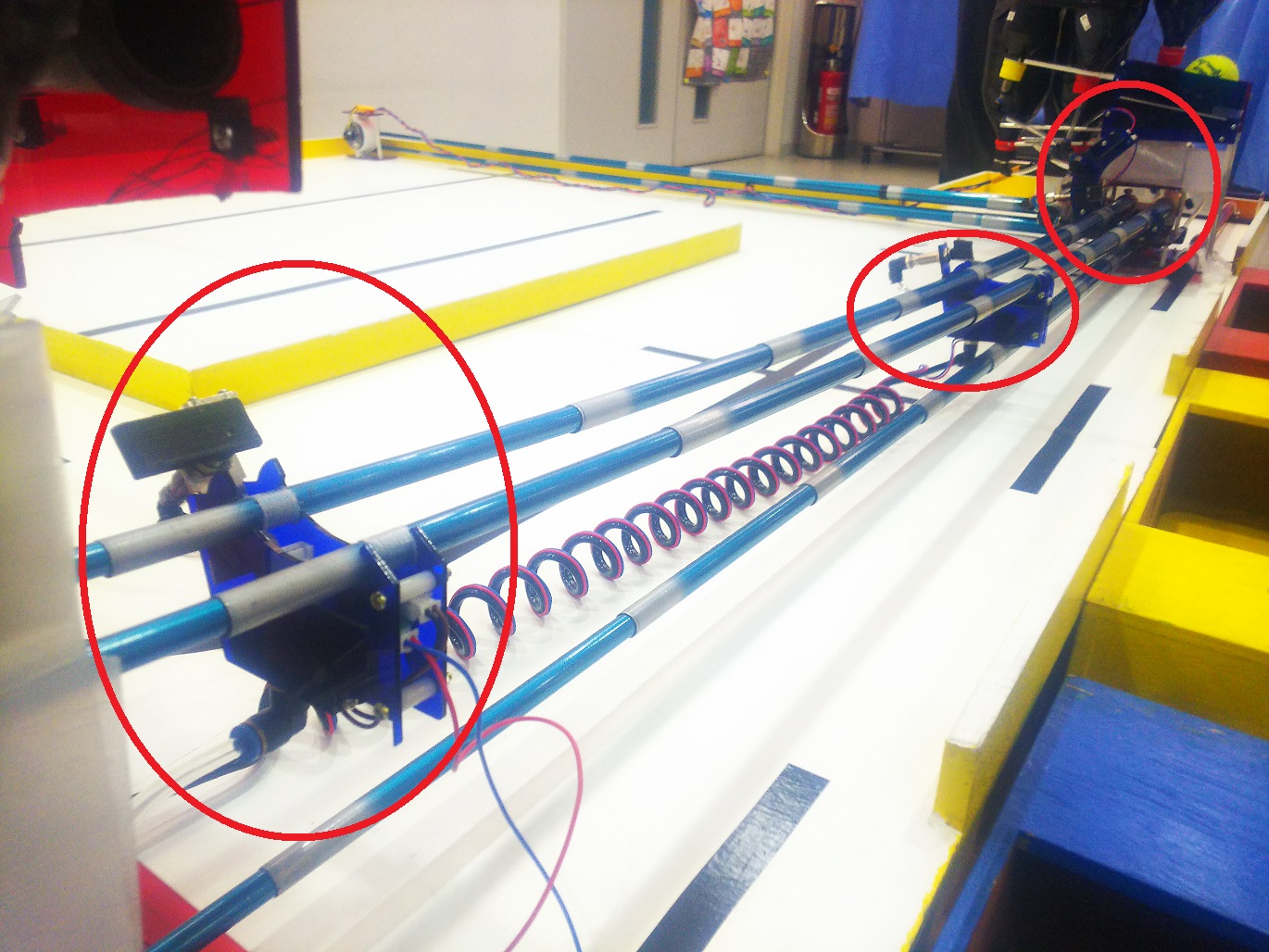
芸術的なまでに初期制限ギリギリ に収納された状態からエアーの力でマイクロファクトリーを展開 、ボールを2つの位置に設置されたダクテッドファン(はいぱ~扇風機的なやつ)でかき集めゴールに叩き込みます。
↑最大展開でこんな感じ。
↑レールの上を転がるボールはこいつらが色で分けてます。と言っても今回参加するロボコンの名前でもあるはずの『知能』の息吹は微塵も感じられず、青い物を見つけたら何も考えずに全力で叩き落しに行くその姿は、さながら飢えたピラニアのようでとても恐ろしかったです。
VIDEO
大会結果 一次予選を75チーム中5位通過。競技時間53秒 (制限時間300秒)。上位11位以内につき二次予選進出 。
二次予選を18チーム中4位通過。競技時間51秒 (制限時間300秒)。上位8位以内につき決勝進出 。
決勝戦は、8チーム中5位。競技時間67秒 (制限時間600秒)。審査員点は決勝のチームの中でも最高得点 でした!特にパフォーマンス点19/20 、スピード点10/10 を頂きました!!!!!!!!
また、真田賞・チャレンジ技術賞 をW受賞 しました!!
知能も無ければロボットかも怪しいような騒音発生源 を会場から締め出す事なく快く審査してくださった審査員の皆さん、本当に、本当にありがとうございました!!!!!!!!!!
真田賞では『回路的な部分を流石にもっと頑張ってほしい』 との理由からオシロスコープ を、
チャレンジ技術賞では『知能的な部分を流石にもっと頑張ってほしい』 との理由からNVIDIA Jetson TX2 を、副賞として頂きました!!!!!!!!!!!!!!!!!!!!!!!
タイヤ絶対撲滅太郎先輩製作委員会は、
仲鉢:機械全体設計(初期制限に収めるのとかめっちゃヤバい)・加工
ぼく(鈴木) :機械のごく一部(分別ユニット)の設計・加工・回路 設計・制御
という構成だったので、ぼくは耳が痛くて途中から聴覚を失っていました。
Jetsonは学生ロボコン時代に鈴木は一生お世話になっていたので、副賞として頂けて本当に嬉しいです!!!!!!!!!!!!!!また、いち回路作ったりするがち屋さんとしてもオシロ使い倒します!!!!!!!!!!!!!
最後に、チャレンジ技術賞の受賞の際、
『我々、知能ロボットコンテストにはこんなロボットが出てくるだろうなぁみたいな大体の予想があったんですね。そういった中、ちょっと予想していなかったパターンで来たということは、もうそれは、我々審査員の準備不足というところがありまして、ただただ敗北しました。』
と、お言葉を頂きました。これは我々ロボコニストにとっての夢であり、最大の誉れであります。この言葉、一生の宝物にします!!!!!
反省
大学と会場でフィールドの地面が違った ため大改修。その過程で大学では出せていた満点を諦めた。改修してペットボトルが追加で必要になり前日に1.5Lのコーラを泣きながら飲んだ 。おいしかっ
仙台に来て23時にアクリルを切るのはやめましょう。 うるさいです。競技4時間前に空気入れを壊さない。 爆速でボールを集める大会ではない 修士2年は研究をしよう。 修士2年は就活をしよう。 (一部ケースを除く)
現場からは以上です。どうかご安全に。

















皆さま初めまして.
アクア研所属の無職のspanaです.
普段は流体計算とかをやっているのですが
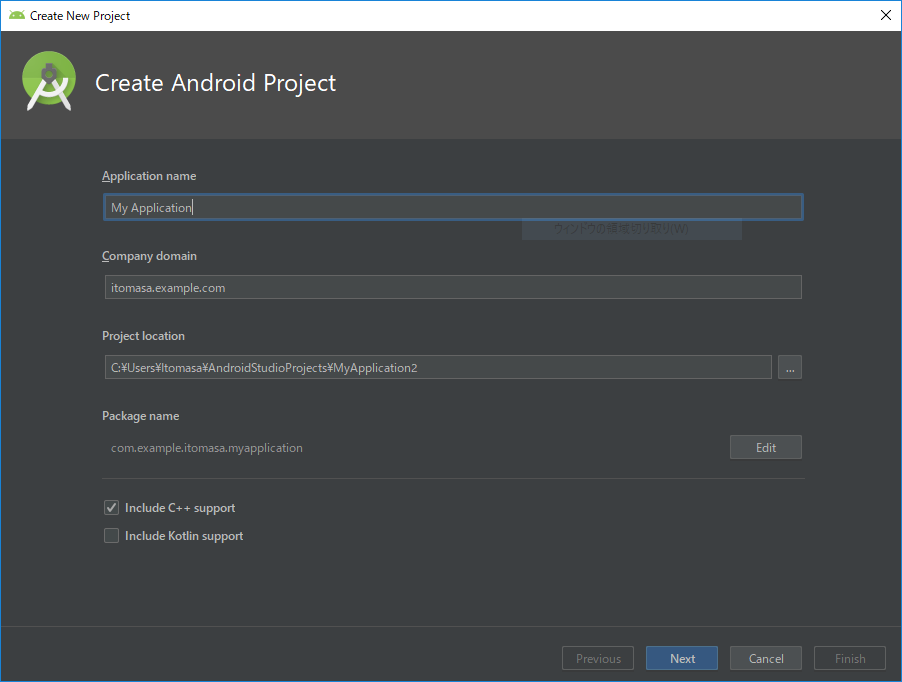
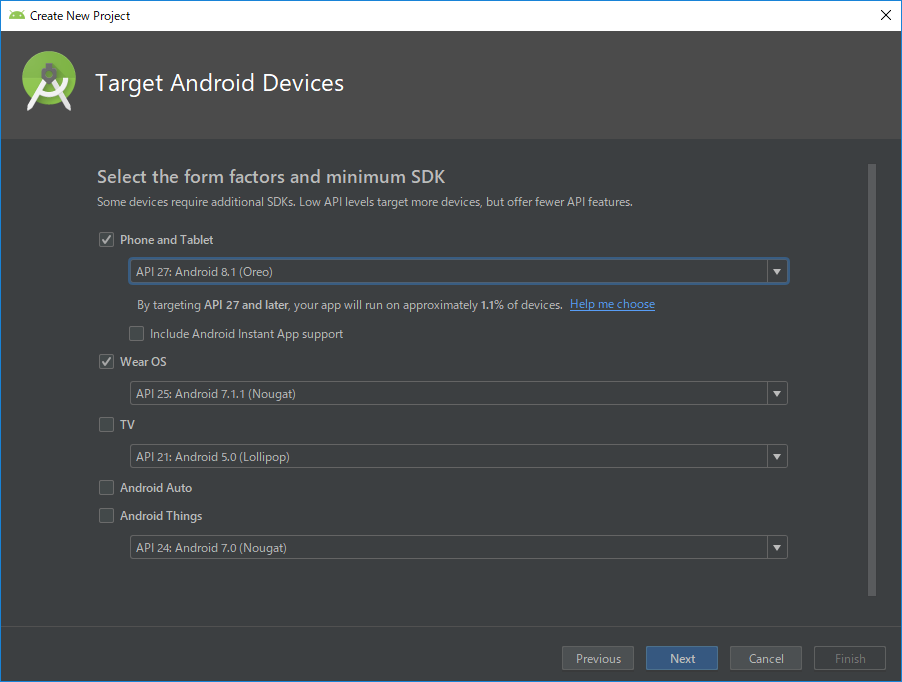
今回は何をトチ狂ったのかadvent calenderの5日目の投稿用のネタとして3Dプリンターのみでハーモニックドライブっぽい何かを作りました.動画は張り付けがよくわからなかったのでtwitterに貼りました.申し訳ありません.
減速比は83/3しかないのであまりハーモニックドライブっぽくは見えないですが…
経緯
部室にいたらAdCをかけと言われたのですが,ネタがなかったため24時間で作りました.
このスピードは3Dプリンターならではですね.
あと加工はしたくなかったので,全く加工せずに作り終わるようにしました.さすが3Dプ(ry
ハーモニックドライブ is 何?
皆さんご存じの通り質量の割に高い減速比が得られたり,静かだったりするのでロボット屋さんに人気の減速機ですね.
詳細な説明は開発元のハーモニックドライブシステムズさんが公開されているここを見るのが早いと思うので見てください.
要は重要な要素は下記の三つです.この三つがちゃんと設計,製造できたらとりあえず動きます.
作ってみた
ウェーブジェネレータは本来楕円上のカムの外周に薄肉のボールベアリングをはめ込むのですが,それを再現すると部品点数が多くなるのでこのような構造にしました.

両端にベアリングをはめ,そのベアリングでフレクスプラインを変形させます.
寝不足で頭が働いていなかったためボールベアリングも3Dプリンターで作りました.とはいってもステーターとリテナーのみ出力して既製品の鉄球を組み合わせただけですがフレクスプラインは変形する必要があるので気を使う部品です.
3Dプリンターで一般的に使われる素材であるPLA,ABS,PETなどだと摩耗や繰り返し変形や剛性を考慮しなければならず面倒くさいので最近購入した軟性フィラメントであるTPUを使用しました.
TPUは独特な設計が可能となるので持っていて損はないですよ.
サーキュラスプラインはただの剛体歯車なので当然どうとでもなるので割愛します.
作製したものを組み合わせたものがこちらです.
微妙にフレクススプラインが楕円形に変形しているのが分かると思います.
回してみよう
組みあがったのでモーターとくっつけて回してみたのがページトップの動画です.

今回モーターを選定する時間もあまりなかったので適当に転がっていたモーターを使いました.
まあこのくらいのモーターはどこのご家庭の床にもころがっていますよね案の定ベアリングのガタがひどく異音を立てていましたそれと歯のかみ合いが悪く摩擦が大きかったですね.
まあ調整せずにすべての部品一発刷りなので,調整したら普通に回るようになると思います.
最後に
いかがでしたか.今回使用した部品はすべてflashforge様のadventurer3で出力しました.
最高の3Dプリンターとは言いませんが,15万円以下の3Dプリンターでは一番良いと思います.
公式様から7万円弱で購入できますので是非クリスマスプレゼントとして購入されてみてはいかがでしょうか?
(なおTPUは純正のフィラメントではありません.TPUを使用して不具合が万が一生じたとしても当方は一切関知しませんのでご了承ください)