ちょっと変わったキーボードを作った
この記事は rogy Advent Calendar 2019 の2日目の記事です。
こんにちは。ふらいです。
ちょっと変わったキーボードを作ったお話です。
実はこのキーボードは先日行われた展示会で展示してました。
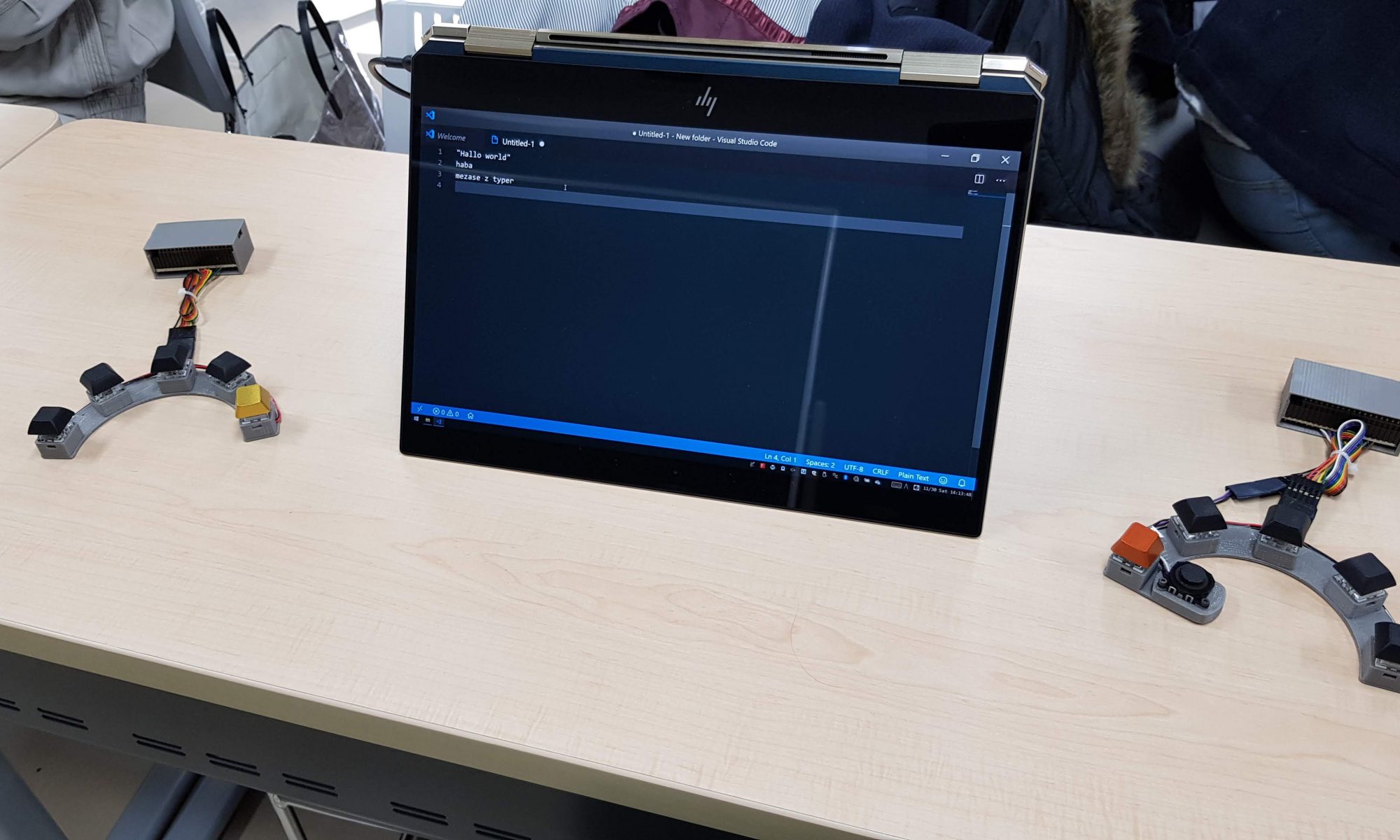
こんなやつです!
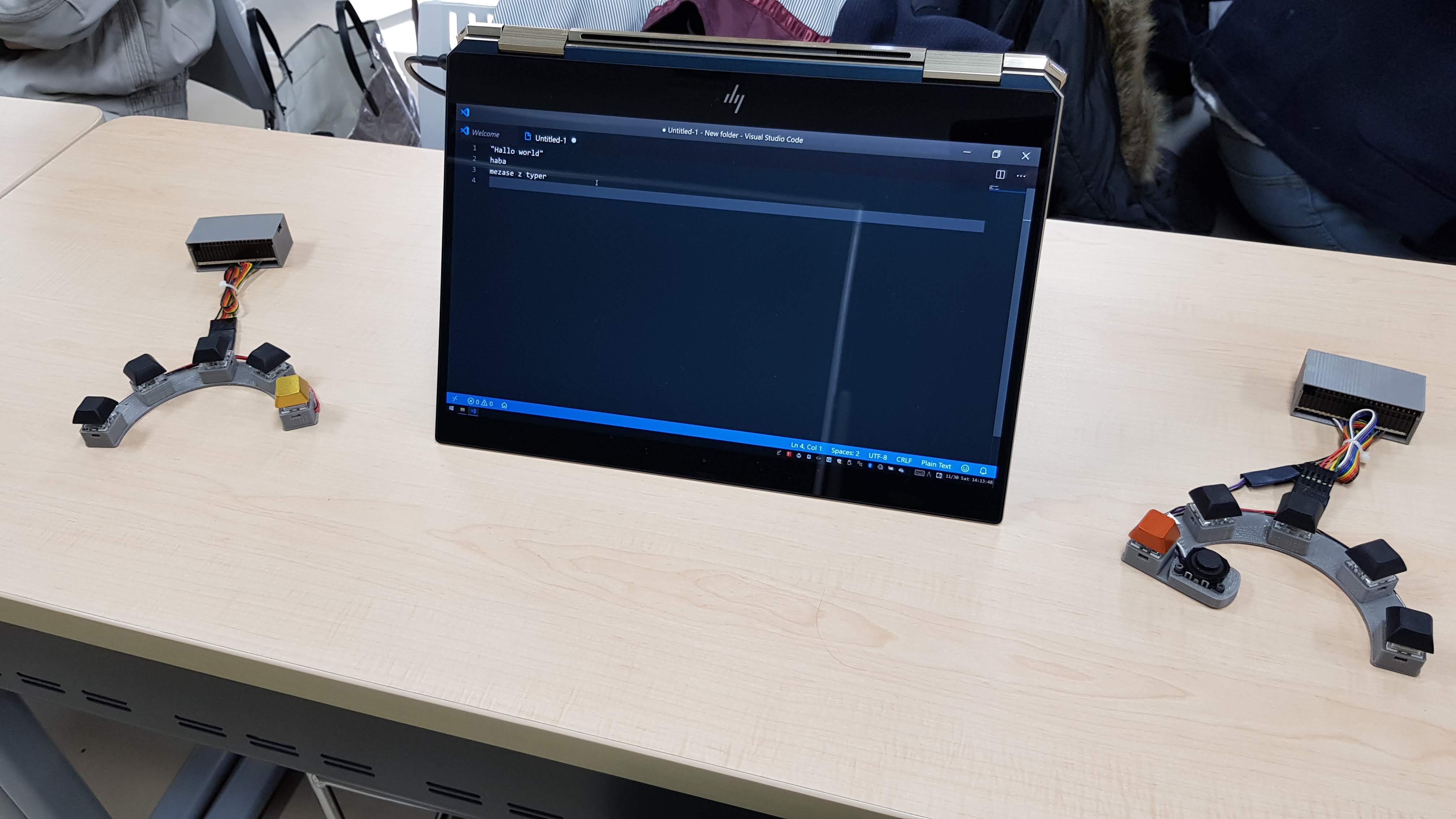
特徴としては
- キーが左右に5個ずつしかない
- 左右完全セパレートで完全無線化
- キーボードだけでなくマウス操作も可能
- PC側に特殊なドライバ不要
などです。
ごあいさつ
皆様ごきげんよう。
部長の…ここでは煎餅と名乗ってだけおきます。
そういえばロ技研では垢名で呼び合う人が多いイメージですが,私は呼ばれても多分反応できません。
本年のrogy Advent Calendarが本日より開始されます。その開幕として部長である私がブログを書きます。
ロ技研のAdvent Calendarでは色々なブログが登場します。技術関連のお話もそうでないお話もあるかと思うので,今から楽しみです。
流行りに乗って4足歩行ロボットを作る
水中ロボコンに参加してきました
皆さんこんにちは。アクア研17の煎餅の人です。
本日は,我々アクア研が参加してきた「水中ロボットコンベンション in JAMSTEC 2019」の参加報告をさせていただきます。

Avatar Handの紹介
皆さんこんにちはAssist研の15みやたです.
今回は僕が開発に携わっているロボットハンド,通称Avatar Handを紹介します.

“Avatar Handの紹介” の続きを読む
【RoboOne】修論あるけど二足歩行で”アレ”やりたい!
※この記事にはロボットへの暴力的な表現が含まれています。
■Robo-One Lightに出てきました

二足歩行ロボットの格闘競技です。要するに相手を3回ぶん殴って倒すと勝ちます。重量1kg。
今年のCheeseの活動!
おはようございます こんにちは こんばんは. 16のだんごです.
今日は今年度のCheeseの活動の報告をしていきたいと思います.
Cheeseとは?
東京工業大学ロボット技術研究会Cheeseとは,マイクロマウスというロボット競技に参加している団体名です.
マイクロマウス競技では,ロボットが自立して迷路を解いてゴールを目指し,スタートからゴールまでに達する最短時間を競い合うロボット競技です.
加速杯・技術交流会 開催のお知らせ
ごきげんよう, ヒューマノイドロボット部門ACT代表のゆきです.
2019年2月のROBO-ONE autoが中止となりましたため, 練習会「加速杯」(かそくカップ), ならびに技術交流会を, 来たる2019/3/17(日)に開催いたします.
詳細は以下の通りです.
写真を直線画にするツール
Merry Xmas
どうもこんばんは、15-nomoです。
こちらはrogy Advent Calendar 2018の25日目、最後の記事になります。
本当はいま自作している自分のblogで公開したかったのですが、間に合わなくてrogiken blogに投稿します。 自作blogについてはまた今度。
また、記事も最近作っている三輪オムニボールについて書こうと思ったのですが、回路にミスがあったのでこちらもまた今度にします。
ということで今回はLinePictureという作品について書きたいと思います。
皆さま初めまして.
アクア研所属の無職のspanaです.
普段は流体計算とかをやっているのですが
今回は何をトチ狂ったのかadvent calenderの5日目の投稿用のネタとして3Dプリンターのみでハーモニックドライブっぽい何かを作りました.動画は張り付けがよくわからなかったのでtwitterに貼りました.申し訳ありません.
減速比は83/3しかないのであまりハーモニックドライブっぽくは見えないですが…
経緯
部室にいたらAdCをかけと言われたのですが,ネタがなかったため24時間で作りました.
このスピードは3Dプリンターならではですね.
あと加工はしたくなかったので,全く加工せずに作り終わるようにしました.さすが3Dプ(ry
ハーモニックドライブ is 何?
皆さんご存じの通り質量の割に高い減速比が得られたり,静かだったりするのでロボット屋さんに人気の減速機ですね.
詳細な説明は開発元のハーモニックドライブシステムズさんが公開されているここを見るのが早いと思うので見てください.
要は重要な要素は下記の三つです.この三つがちゃんと設計,製造できたらとりあえず動きます.
作ってみた
ウェーブジェネレータは本来楕円上のカムの外周に薄肉のボールベアリングをはめ込むのですが,それを再現すると部品点数が多くなるのでこのような構造にしました.

両端にベアリングをはめ,そのベアリングでフレクスプラインを変形させます.
寝不足で頭が働いていなかったためボールベアリングも3Dプリンターで作りました.とはいってもステーターとリテナーのみ出力して既製品の鉄球を組み合わせただけですがフレクスプラインは変形する必要があるので気を使う部品です.
3Dプリンターで一般的に使われる素材であるPLA,ABS,PETなどだと摩耗や繰り返し変形や剛性を考慮しなければならず面倒くさいので最近購入した軟性フィラメントであるTPUを使用しました.
TPUは独特な設計が可能となるので持っていて損はないですよ.
サーキュラスプラインはただの剛体歯車なので当然どうとでもなるので割愛します.
作製したものを組み合わせたものがこちらです.
微妙にフレクススプラインが楕円形に変形しているのが分かると思います.
回してみよう
組みあがったのでモーターとくっつけて回してみたのがページトップの動画です.

今回モーターを選定する時間もあまりなかったので適当に転がっていたモーターを使いました.
まあこのくらいのモーターはどこのご家庭の床にもころがっていますよね案の定ベアリングのガタがひどく異音を立てていましたそれと歯のかみ合いが悪く摩擦が大きかったですね.
まあ調整せずにすべての部品一発刷りなので,調整したら普通に回るようになると思います.
最後に
いかがでしたか.今回使用した部品はすべてflashforge様のadventurer3で出力しました.
最高の3Dプリンターとは言いませんが,15万円以下の3Dプリンターでは一番良いと思います.
公式様から7万円弱で購入できますので是非クリスマスプレゼントとして購入されてみてはいかがでしょうか?
(なおTPUは純正のフィラメントではありません.TPUを使用して不具合が万が一生じたとしても当方は一切関知しませんのでご了承ください)