皆さん工大祭楽しんでますか?17のおがたです。今回は僕の展示についてざっくりと紹介します。
今回僕が作ったのはオーディオアンプです。

実用するつもりで作ったこともあり、ポケットサイズに収めています。
是非見に来て下さい。
東京工業大学の公認サークル「ロボット技術研究会」のブログです。 当サークルの日々の活動の様子を皆さんにお伝えしていきます。たくさんの人に気軽に読んでもらえると嬉しいです。
こんにちは、18のHitomosiです。
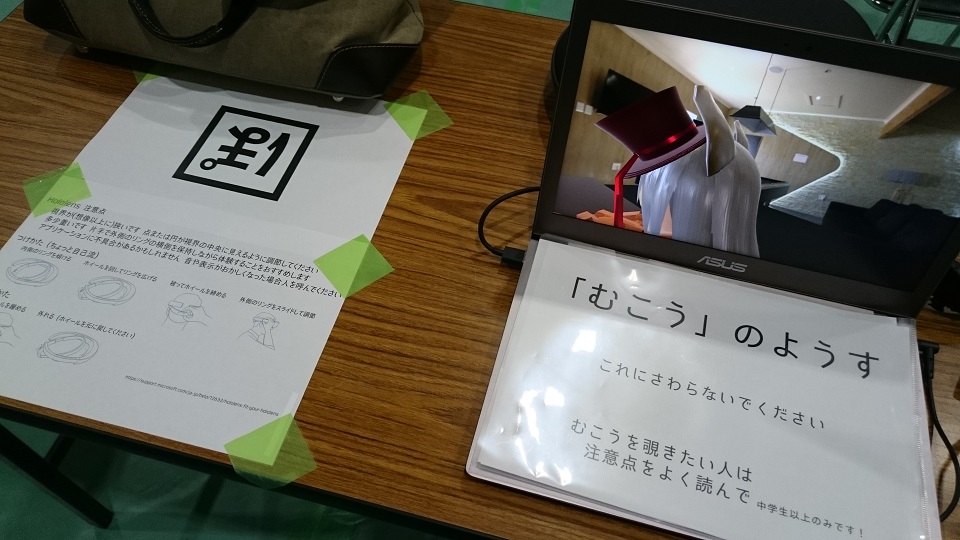
私はAssist研という研究室でHIDデバイスを作っています。今回の工大祭では、傾けると動くマウスを展示します。
工大祭で展示予定の、傾けると動くマウスです。
ダブルクリックの成功率は低いんですが、なんとか調整できたらなと思ってます。 pic.twitter.com/66CW9wbAzj— Hitomosi (@Hitomosi_TIT) October 4, 2018
3軸加速度センサを用いて重力加速度からどの程度傾いているかを判定しています。机がなくても片手で操作ができることと、HIDドライバを使っているので、たいていのPCに接続するだけで動作するのがポイントです。
こんにちは.まるくす(@UMR_UMA_RUX)です.
ロボコンも終わり時間が出来ました.(※要出典)
ところで私のおうちのエアコンは,時間が経つと勝手に切られる仕組みとなっております.
連続稼働〇時間でとかではなく適当なタイミングで,勝手に切られます.
今回はこの仕様に対抗するためタイトルの通りのマシン(笑)を作成しました.

することはいたって単純で,エアコンのスイッチがOnからOffになったのを検知したらソレノイドを動かす.それだけです.
単純なのでマイコンレスで作ってみました.
その過程を大雑把に以下に記します.
—
実際に電源つけっぱなしで放置するにあたって,一番怖いのは火災です.
自作回路が火を噴いた!なんてことがあればおうちを追放されることは想像に難くありません.
安全に気を付けつつ回路を作っていきます.
回路図載せようかと思いましたが,紙に書いたものしかないのと,デジタルで書き直すのが面倒なため断念.
簡単に言うと,フォトダイオードの信号を増幅してコンパーレータに突っ込み,その出力をNAND素子とRC回路でえんやこらしました.結果としてエアコンがオンからオフになった瞬間から1秒間ほどだけソレノイドを動かす回路が出来ました.そんなこんなで回路は完成です.
そして当然,回路だけでは動かないのでガワを作りました.
はじめてFusion360を使ってみましたが中々使い心地がいいですね.
あとははんだ付けをして,組み立てて完成しました.
無事に動いて幸せです.

今までは回路は回路制御班の皆さんに任せっきりだったのですが,自分で作ってみると難しいですね.回路制御班のありがたみを身にしみて感じました.でも楽しかったのでまた作ってみたいです.
というわけで無事動いたのですが,おうちの管理者に無事止められてお蔵入りとなりました.めでたしめでたし.
工大祭展示が完成しなかったら代わりに出そうかなと目論んでます.
こんにちは、やまだです。
セキュリティ・キャンプ2018に応募してみたら通ったので行ってきました。
参加したコースは、YトラックのOS開発ゼミの、最先端OS談義というコースです。
5日間あったセキュリティキャンプで、トラックでの活動は、キャンプ2日目から4日目までの、おおよそ3日程度でした。
同じOS開発ゼミでも、3つのコースがあり、他のコースはゴリゴリ実装していた感じなのですが、私のコースはまさにゼミという感じでした。
1日目(キャンプ全体では2日目)は、OSの役割、歴史に関することを学びました。それを学んだ上で、現代のOSの課題や改良点を各自で探しました。
1日目で探した課題点について、解決策を自ら考え提示しました。必要ならば簡単な実装もしました。
このあたりは、講師、チューターの方がいろいろとサポートしてくれたので、露頭に迷うことなく比較的スムーズに進めることができました。
この日は今までの成果のまとめを行いました。自分たちで見つけた課題点について、考えた解決策、それがどのくらい有効なのか、といったことをスライドにまとめて発表しました。
発表はトラック全体で行われました。
となりの人々が強そうなカーネルモジュールを作っていたりして強そうでした。
また、実は隣でコンパイラ開発とベアメタルプログラミングをやっていてました。コンパイラはセルフホスティングしていたりしていて、すごかったです。
自分の弱さに絶望するので良い機会だと思いました。
キャンプ中の進捗についてですが、まだ詰めきれていないところがあるので、ある程度区切りがついたら公開したいと思います(公開できるかなあ……)。
全体講義としていくつかの講演と、仕事紹介、グループワークなどがありました。
また、最終日には各コースごとに成果発表がありました。
他の人がめっちゃ強いことをしていてめっちゃ強いなあと思いました。
僕はセキュリティとかマルウェアとかよく知らないのですが、そのあたりのトラックの発表もあり、自分の知らない世界が無限に繰り広げられていました。
お勉強しなきゃなあ……。
キャンプ中は、食事や睡眠などあらゆることがサポートされていてとても過ごしやすいです。
1年ぶりくらいに1日3食生活を送りました。足りないということはないと思います。
あと水が無限に提供されます。お菓子も有限ですが提供されます。
講義部屋は基本エアコンが効いていて、宿泊するための個人の部屋も毎日掃除されるので最高です、一生あそこで暮らしたいと思いました。
キャンプ中は生活習慣が改善され、朝型の生活を送ります。ただしキャンプが終わるとすぐに夜型に戻ります。これには個人差があると思われます。
基本的に外出は禁止されていますが、外が嫌いなので僕は全く問題ありませんでした。外出しなくても快適な生活を送ることができるので最高です。
また、本とかステッカーとか、なんかいろいろもらえます。とても嬉しい。
行って後悔することはないと思うので、ぜひ応募してみることをおすすめします。とても楽しかったです。
こんにちは
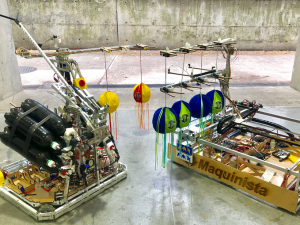
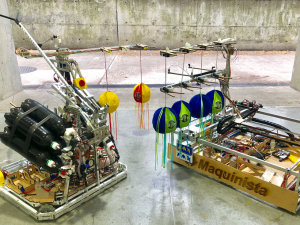
学生ロボコン2018でリーダーを務めていました、谷です。
結果報告記事をMaquinistaブログに書こうと思っていたのですが、
ブログメンテナンスがなかなか終わらずタイミングを逃していました。
ABUも終わり丁度いいタイミングだと思ったのでロ技研ブログの方でご報告致します。
Maquinistaブログの方にもメンテが終わり次第記事を移植します。
さて学生ロボコン2018ですが、試合結果は決勝トーナメント第一試合で敗れ
ベスト8という結果でした。
以下簡単に各試合についてご説明いたします。
<予選リーグ第一試合 vs 東京農工大学>
初戦で若干の不安もありましたが、練習通り動作をさせることができ24秒でのRongBay達成で勝利することができました。1戦目にしてロボットの理想の動作行うことができて一安心でした。
<予選リーグ第二試合 vs 岐阜大学>
この試合では人為的なミスと高速化の試みによる不具合のため、第一試合同様のパフォーマンスをすることができませんでした。その中でも最大限できることを行い点数を稼ぎ、62対33で勝利することができました。試合中は岐阜大学さんも順調に得点を重ねていて焦りましたが、無事決勝トーナメントに進むことができて良かったです。
<決勝トーナメント準々決勝 vs 九州大学>
この試合では初戦同様、多少遅くとも確実にRongBayを達成しようという気持ちで臨みました。しかしゴールデンシャトルコックの一投目は僅かに外れ、その間に九州大学さんにRongBayを達成されて敗退しました。放送で相手のシャトルコックの軌道を見ましたが、かなり惜しいところで負けてしまっていたようです。
今回はベスト8という結果に終わってしまい、
二連覇を目標としていた私達にとっては不本意な結果となってしまいました。
今年は機体の完成度も高いと思っていたので尚更悔しかったです。
今回無事に大会を終了し、ベスト8という結果を残せたのはこれまで応援してくださった多くの方々のおかげだと思っております。
本当にありがとうございました。
私はこれで引退となってしまいますが、チームとしては更に技術を高め学生ロボコンでの優勝、そしてABUロボコンでの優勝を目指して活動していきます。
今後ともご応援の程、よろしくお願いいたします。
今回の大会の結果は学校の記事にもして頂きました。
是非こちらもご覧ください。
https://www.titech.ac.jp/news/2018/042011.html
さて話は少し変わりますが、私は個人的にベトナムで開催されたABUロボコンの観戦に行ってきたので少しだけレポートします。
大会当日、開始の1時間ほど前に会場につきました。
入口は綺麗に装飾されており、お馴染みの企業ブースもありました。
席は東京大学さんの応援席に入れていただき、共に日本チームの応援をしました。
会場内にはステージが設置されており、大きなディスプレイに様々な情報が出ています。また現地の応援団がステージの両サイドにいて、各フィールドの応援をしていました。国際大会で応援量の差を極力出さない良い工夫ですね。

試合中は観戦に熱中していてあまり写真は撮りませんでしたが、
やはり現地で見るとロボットの細かい様子や会場の雰囲気も楽しむことができました。
途中にはベトナムらしいショーもあり賑やかな様子でした。

最後に、優勝したベトナムチーム、
そしてベスト4とABUロボコン大賞を受賞した東京大学RoboTechさん、
おめでとうございます!
熱い試合をありがとうございました!



最後にはお馴染みのルール発表もあり、2019大会の始まりを感じました。

ルールに関して特にコメントはしませんが、
Maquinistaは次の大会でも優勝を目指して頑張ります!
今後ともよろしくお願いいたします。
こんにちは!16のゆきです.
デスマーチの末, 今朝3Dプリンタから生まれた子を展示します!
製作期間は2週間で, Fusion 360の3次元スプライン曲線機能を使って作っています.
展示物が完成しました!!!
めっちゃゆっくり歩きます!! pic.twitter.com/HU69FJaMuy— ゆき@展示物完成 (@blessingyuki) 2018年8月4日
機械何もわからないので雰囲気で作りました.
良かったら見に来てください!