この記事はrogy Advent Calender 2022の25日目の記事です。
……ただいま25日の46時くらいです。
Cheeseの組長をしている18-Hitomosiです。
Cheeseは、マイクロマウスというロボット競技に参加している研究室です。
Cheeseは今年度の全日本学生マイクロマウス大会に4人が出場しました。クラシックマウス競技に2人、マイクロマウス競技に2人です。
東京工業大学の公認サークル「ロボット技術研究会」のブログです。 当サークルの日々の活動の様子を皆さんにお伝えしていきます。たくさんの人に気軽に読んでもらえると嬉しいです。
この記事はrogy Advent Calender 2022の25日目の記事です。
……ただいま25日の46時くらいです。
Cheeseの組長をしている18-Hitomosiです。
Cheeseは、マイクロマウスというロボット競技に参加している研究室です。
Cheeseは今年度の全日本学生マイクロマウス大会に4人が出場しました。クラシックマウス競技に2人、マイクロマウス競技に2人です。
みなさんお元気ですか?ごきげんよう!この記事は rogy Advent Calender 2022 の24日目の記事です。世間はイブで熱々ですが、懐が寒くなるこの時期、あったまりたいですね?燃やすんだ回路で有名な21-miyaです。え?その人はもう知ってる?僕は有名実況者では無いはずだけどなぁ
今日はよく廃墟で見かけるアイツのことみなさんお忘れでは無いですか?
そう、どこにでもいるアイツ…
ゴキ..ではなくキャタピラについての話です。
まとまってるサイトはすでにいっぱいありますが、あえて駄文を承知で書きます。
ざっくりまとめると重いものを運ぶために蒸気機関の頃に発明され、のちに戦車として発展、改良されてきたもので、重機や戦車として良く用いられている。近代的な面白い足回り。
作りたいと感じるものがそこにあった。そこに理由はいらない気がする。強いて言えば、ライントレース大会でシンプルにタイヤのおもちゃを作るのは負けだと思ったからというのが大きいです。しかし、ちゃんと以下の条件を踏まえているので紹介してみます。
一般的なキャタピラの弱点と強みには以下のようなものがあります。
一般にキャタピラには
・耐貨重量が大きい
・かっこいい
・停車時に安定しやすくそのまま反動が大きい動作ができる
・不整地に強い
・とにかくカッコいい
という利点があることが知られていますね。
・燃費が悪すぎる
・一箇所でも破断すると動けない
・メンテナンス性が良くない
・振動・衝撃が車体に伝わりやすい
その上で、利点はロボコンの役には立たないし、欠点は燃費が悪い=伝達効率が悪い、メンテナンス性が良くない(=作りずらい)はかなり致命的であるため、弊サーではあまり採用する人がいません。というか、私は弊サーで作っている人を見たことありません。
しかし、カッコいいのに悲しいじゃないですか!!しかも、個人的には不整地で走れることから無人探査機として激アツなので作って見たいというのもあります。

これが私が開発をしようと思った理由です。
ちなみにアルミではなく3dプリンターをチョイスしたのはsd90ーhvを駆動用のモーターにするつもりだったので、普通に軽くないといけないことと、安いこと、加えて追加工できることがあげられます。
結論から述べると完成しませんでした。。。
(性根が)腐ってやがる。。。(いや、納期が)早すぎたんだ。。
というわけで、意味があるかはわからない現状報告が下になります。
まず私はこのサイトを参考にして設計を開始して以下のような部品を設計しました。ここで注意したポイントは軸の高さを揃えることと、干渉しないように大きい方の円のサイズや切り欠きを調整したこと、できる限り太くて頑丈なボディを心掛けつつ、切り詰められるところを減らして軽くしたことなどです。
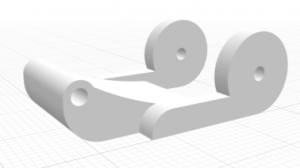
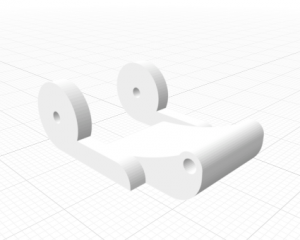
ここまでは良かったのです。
ここまでは。。。
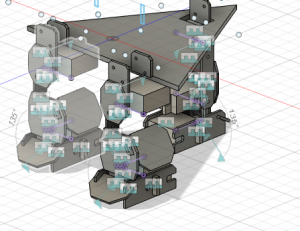
次に、これに軸を作って並べる作業を始めました。22こ並べてジョイントする、簡単なお仕事です。
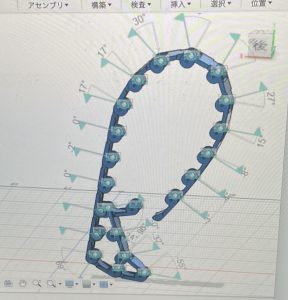
あれれ、辛い上に繋げるとバグるぞ?私の頭の中には疑問符が湧いてきました。なんでこんなことをやっているんだろう?というか印刷して見ないとそもそも(組み合わさるかどうか、ちゃんと動くかどうかは)なんもわからんくないか?
それでも全部並べて見たのが先ほどの画像です。
ナンテコッタ
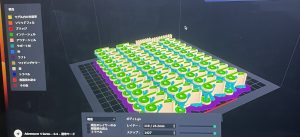
しかし眺めていても大きさは分かりません。じゃあこれを印刷しよう!(3dプリンターは印刷するまで誤差がわからないため)印刷してから実測値を出し、ギアの回転数から歯数を割り出して中のギアを設計するんだ。というわけで3dプリント用のコード生成ツールに並べました。
さすがは量産!壮観だなぁ
そして、いつものようにパラメーターを調整して印刷ボタンを押しました。

印刷時間はなんと怒涛の30時間越え!!
やばいと思いつつスイッチを入れた時、時刻は2022/12/22で、25(明日)が大会なので、すでに徹夜が見えていました。印刷を一度でもしくじれば未完成待ったなしです。(ドキドキチキンレース!)
私が固唾を飲んで見守る中、

印刷失敗!!
これによって完成がなくなりましたとさ。。。
原因がまさかのフィラメントが印刷中に絡まるバグというのが救えない。。。
チキンレースは命懸け(崖から落ちちゃった)ということをはっきり理解できる楽しい計画でした。皆さんは納期よりも早い時期から作り始めましょうね。私はミカン職人なのでいいですが…
錬成失敗!!
というわけで、オチも中身もないので最後はクソブログコピペで締めようと思います。すみません。
みなさんいかがでしたか?キャタピラの前世は?歴史は?今の設計法は!?調べて見ました。調べて見たところ、良く分かりませんでした。皆さんの推しの足回りをコメント欄で教えてね。
失敗した足回りの例兼制御できないという例
怠けたわけではないんです。。。純粋に完成しなかった(ごめんなさい)
こんにちは、20-yoです
いつもはアクア研の紹介しかしていませんが、たまには毛色の異なるものを
演劇をやったことはありますか?
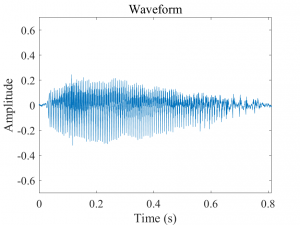
演劇を英語と日本語両方でやったことがある身としては、演劇には言語的に適性があるように感じてなりません
今回は、演劇の発声の練習方法:猫の声真似、に関しての音の分析の一覧を掲示します(猫の声真似入っている発生練習)
クリスマス・イブ目の前にして、カラオケオールするなんて人もいるのかな
声出しに猫の声真似をしてみてはいかがでしょう
この記事はrogy Advent Calender 2022の12/23の記事です
この記事は rogy Advent Calender 2022 の21日目の記事です。
情報の正確性には細心の注意を払っておりますが、万が一、間違いや不備がありましたらご指摘をお願いします。
世界の皆様、ごきげんよう。私が来ましたよ。20-Aoです。Twitterの名前はA-f(まっする)です。
今回のアドベントカレンダーの主催者は私なので、全く何も記事を書かないというのはよろしくないかと思い、急遽書くことになりました。
今回は理論系の記事でいきたいと思います。決して紹介できるような成果物がないとかじゃないですからね!決してねっ!!!!
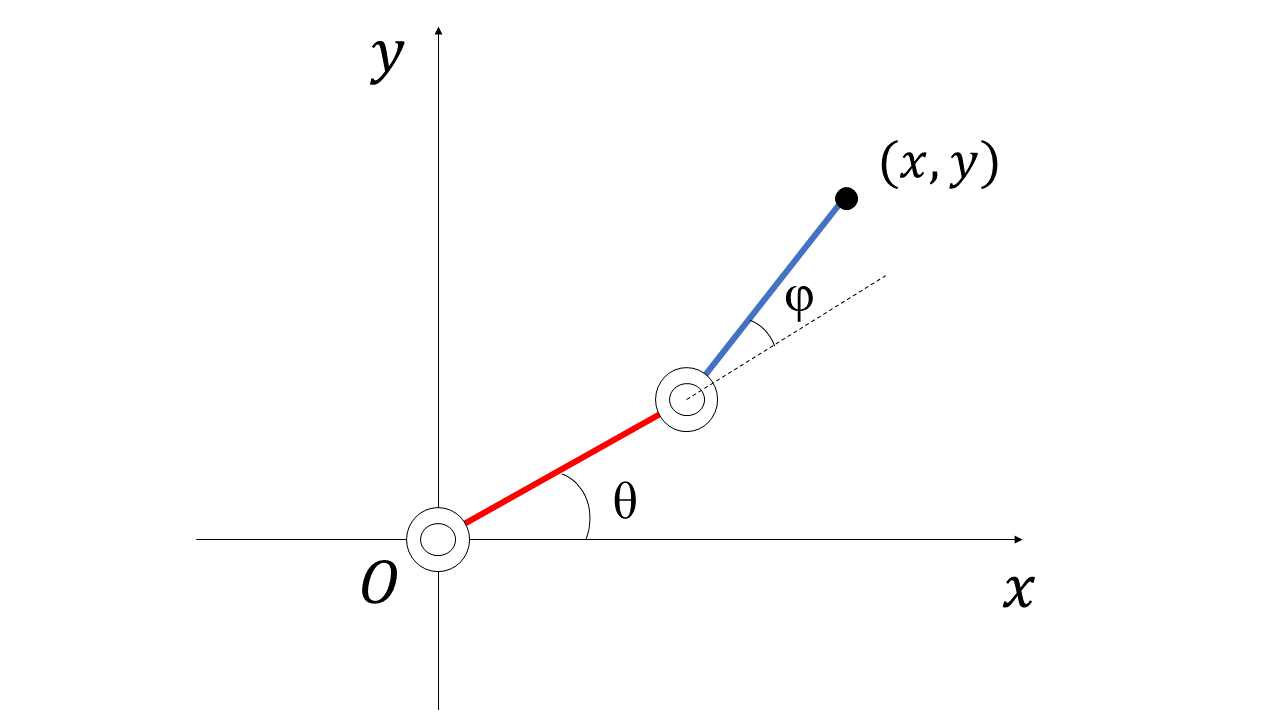
今回は自分の勉強も兼ねてマニピュレータ、いわゆるロボットアームの制御の基礎について軽く紹介しようと思いました。が、あまりにも長くなりそうなので、今回はマニピュレータの制御理論を学ぶにあたって必要な情報をサラッと紹介します。
実機については15の先輩方のROBO-剣の記事に詳しく書いてありますので、是非併せてご覧ください。
記事は以下の3つです。ちなみに、先輩方は第11回 ROBO-剣で優勝されています。(すごい!)
【Gano剣】第11回 ROBO-剣(アーム型) 参加報告 – 機構編 –
【Gano剣】第11回 ROBO-剣(アーム型) 参加報告 – 画像処理編 –
【Gano剣】第11回 ROBO-剣(アーム型) 参加報告 – 制御編 –
“マニピュレータ入門の入門” の続きを読む
この記事はrogy Advent Calender 2022の20日目の記事です。
こんばんは。Assist研の18-Hitomosiです。皆さんはルール無用JCJCタイムアタックをご存じでしょうか?
ルール無用JCJCタイムアタックとは、てち@ためにならない‼︎氏(氏のTwitter)が発端となり始まった、ミニ四駆的な競技?で、ざっくり言うと、
マシンに制限を設けず、ミニ四駆のJCJCというコースを速く走ったほうが勝ち!
というルールの競技です。別に大会とかがあるわけではなく、いろいろな方が動画を投稿している感じです。
詳しくは以下に貼ったニコニコ大百科やルール無用JCJCタイムアタックWikiをご覧ください。
初めまして、ブログ初投稿の19-Mizukamiです。アクア研に所属しています。今回はアルミのロウ付け加工とそれを用いた制作物について紹介します。
この記事はrogy Advent Calender 2022の18日目の記事です。

この記事はrogy Advent Calendar 2022の17日目の記事になります。
工大祭が10月29・30日に3年ぶりに開催されました。
1年の時に一度参加して以降一度も開催されなかったのでとてもうれしかったです。
今回は工大祭で私が展示した筋電計について解説していきます。
こんにちは。2018年入学の後藤(@goto_statement)です。
キャチロボに出場したチーム「ラグビーの亡霊」で、機械と電気を担当していました。
この記事では、キャチロボ出場機体「KIRIN」の電装について紹介します。前回の記事でチーム紹介や動作動画を掲載していますので、こちらもご覧ください。
この記事はrogy Advent Calender 2022 14日目の記事です。
KIRINのアームは4自由度となっていますが、その駆動にはDirect Drive Tech社製のDDT-M0602C-112を用いています。

キャチロボは速さを競うコンテストではないですし、KIRINの機構ではモーターは重力に抗って駆動力を出す必要が無いので、そこまでモーター出力を求める必要がないです。またこのモーターにはモータードライバーが内蔵されていて、RS485通信で制御できるためPCから制御しやすい、などなど、手軽に使えるような特徴を持っていつつ、値段も5000円程度で手ごろなのが決め手となって、採用するに至りました。
ただ、このモーターは少しくせがあって、固定がしにくいです。我々は、まずタップでM2.6(旧JIS…)のめねじを作って…
これは買ったモーターにM2.6のタップを立てる人 pic.twitter.com/nwMOcs39HP
— たくぽん (@takupon009) September 21, 2022
さらにクランプをして、そしてもう1つベアリングを用意して両持ち構造を作っています。
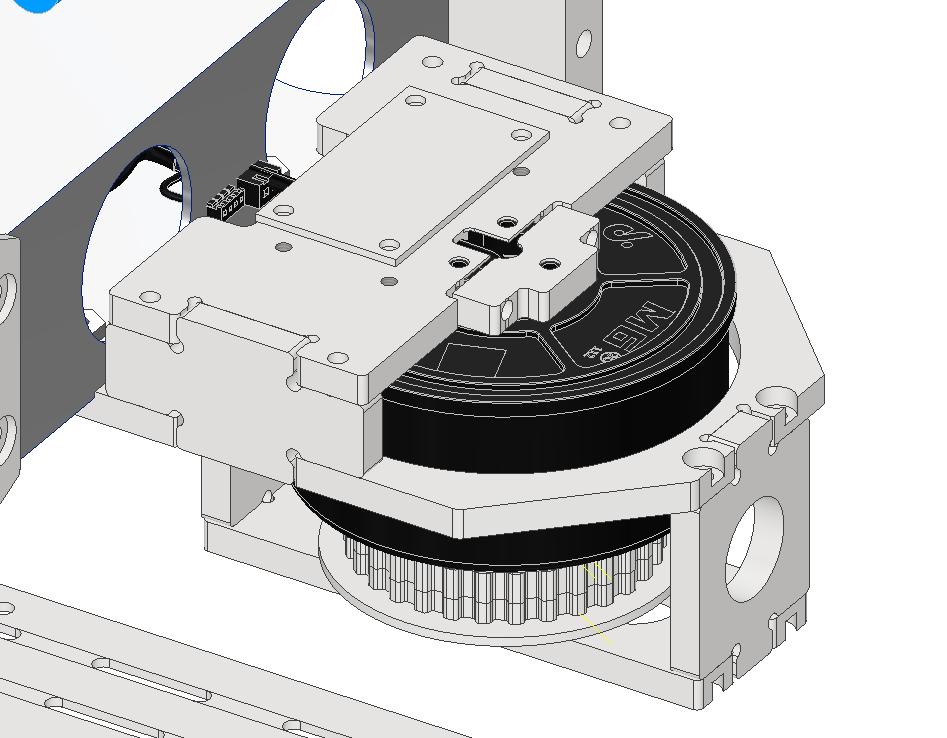
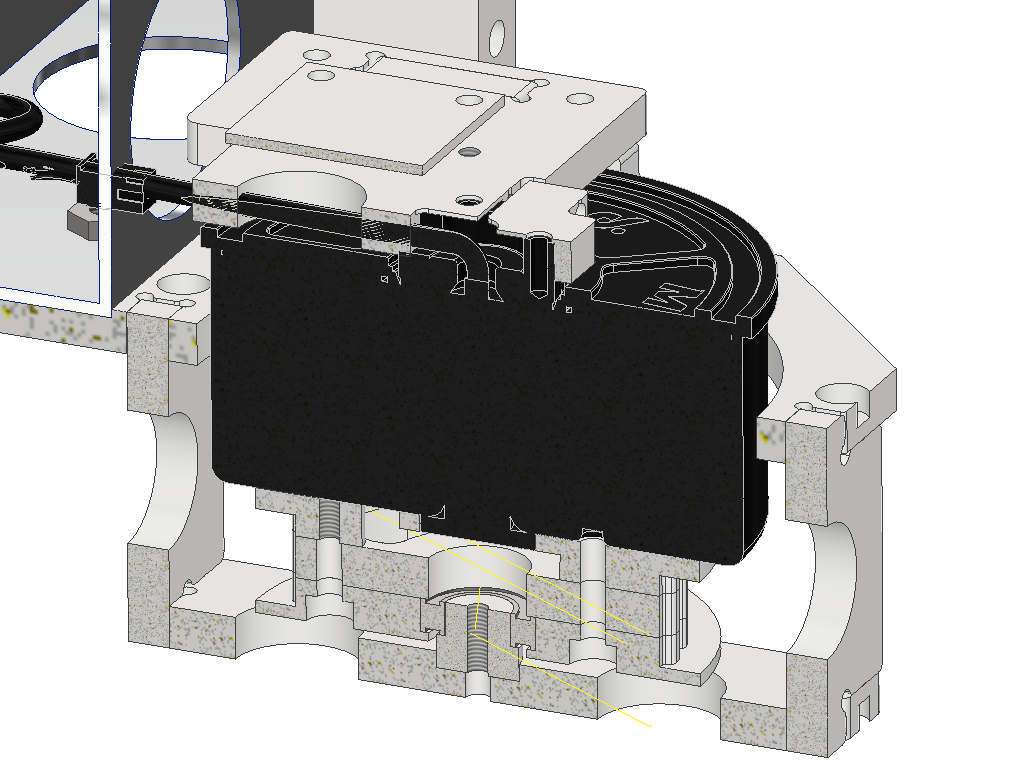
モータードライバーが内蔵されているので電気担当としては比較的楽なのですが、機械担当には負担をかけるモーターですね。
これがKIRINの電装系システム図です。
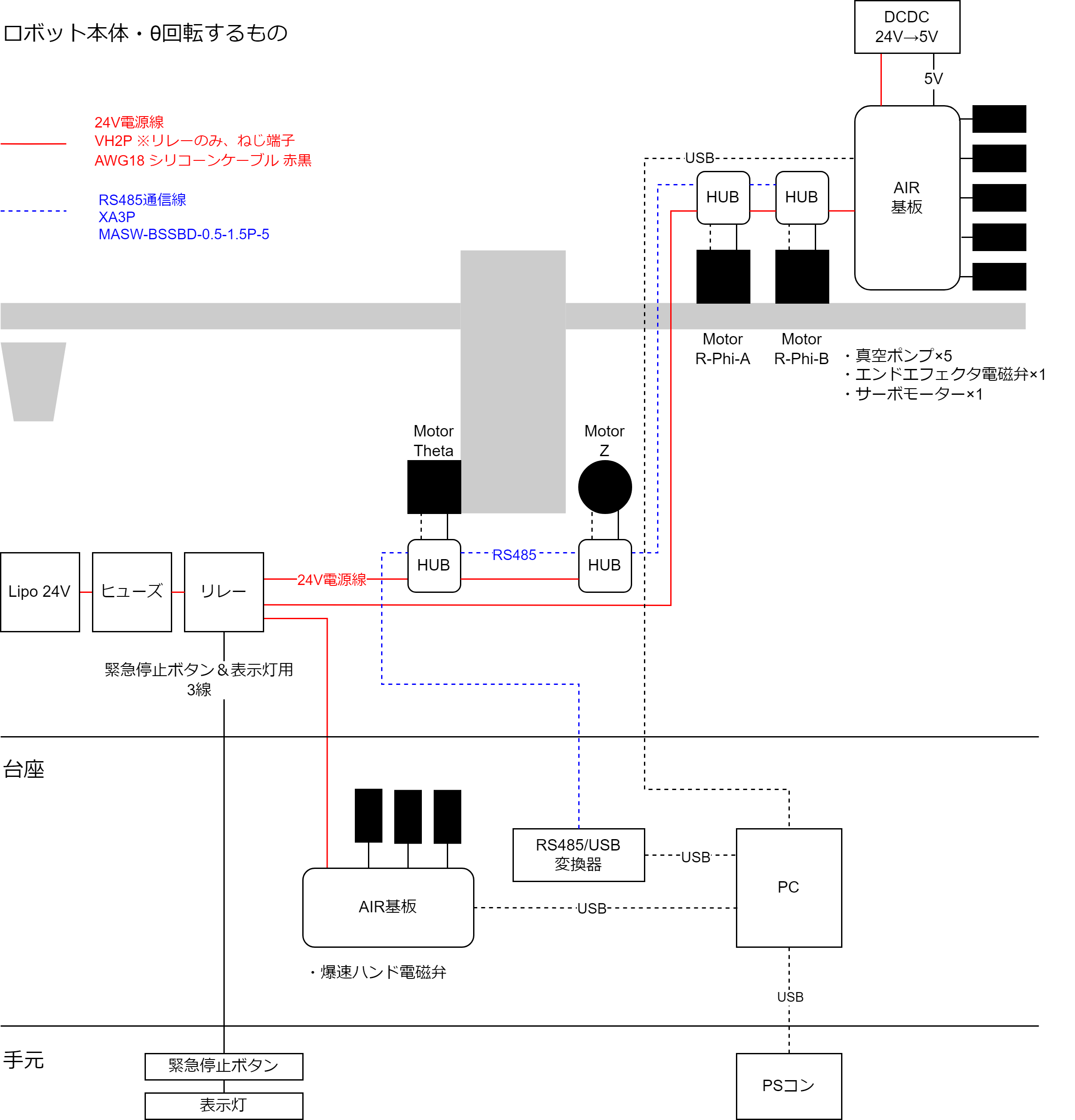
工夫点として、ロボット本体内は配線を簡素にするためディジーチェーンっぽくしています。4つのモーターとエンドエフェクタ用の自作基板「KILLING AIR」の電源供給、そして4つのモーターのRS485通信について、ディジーチェーン風になっているのがわかると思います。自作基板「KILLING HUB」によって、それを可能としています。
今回の電装はできるだけ簡素にして時間をかけないこと、そして場所を取らないことを目標としており、自作基板は上記の2種だけとなっています。
以降は詳細について書いていきます。
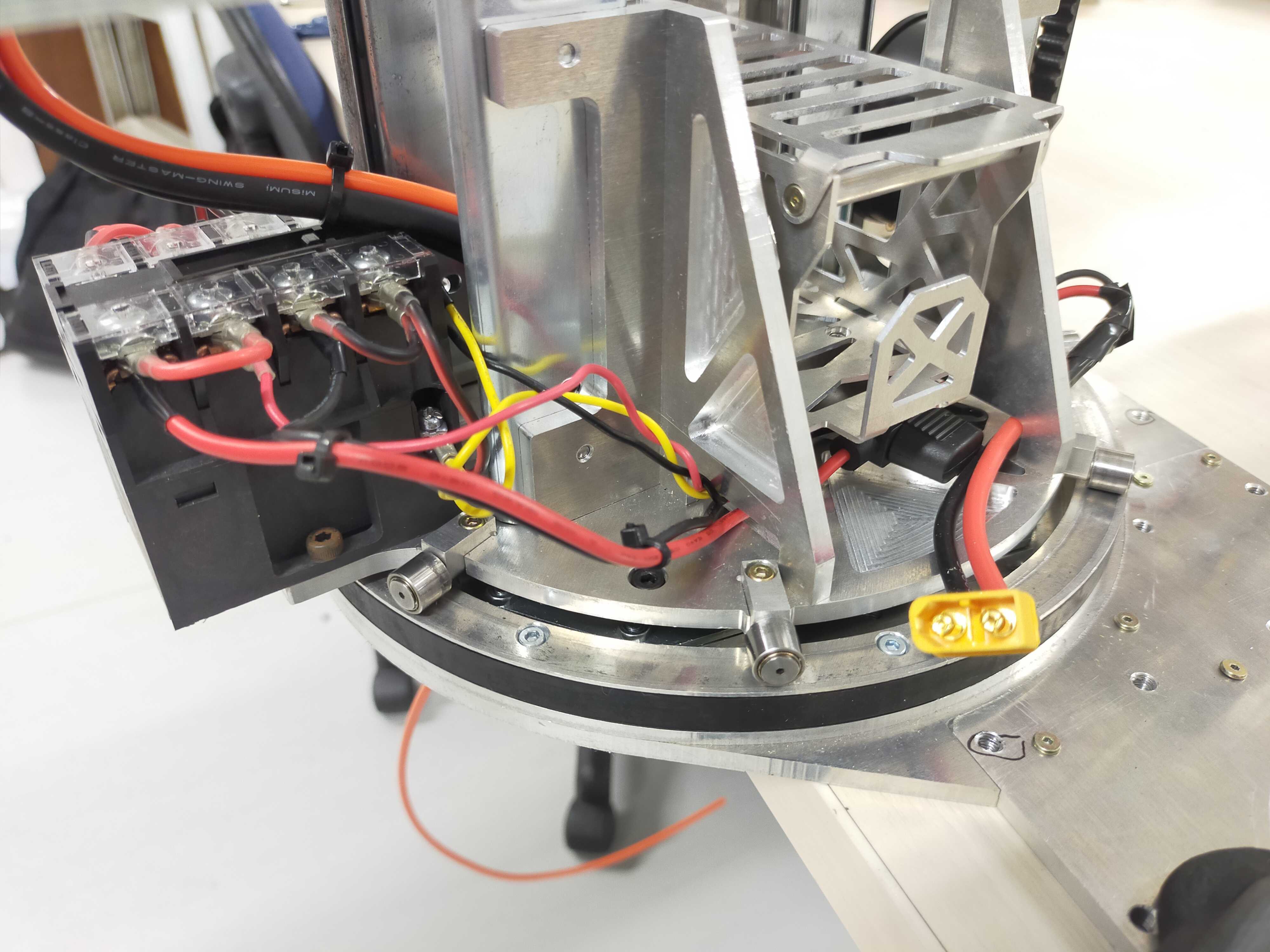
バッテリー周辺は、とにかく部品数を減らしたいし、配線も簡素にしたいし、自作基板もできるだけ作りたくない、ということで、既成品の組み合わせでなんとかしています。
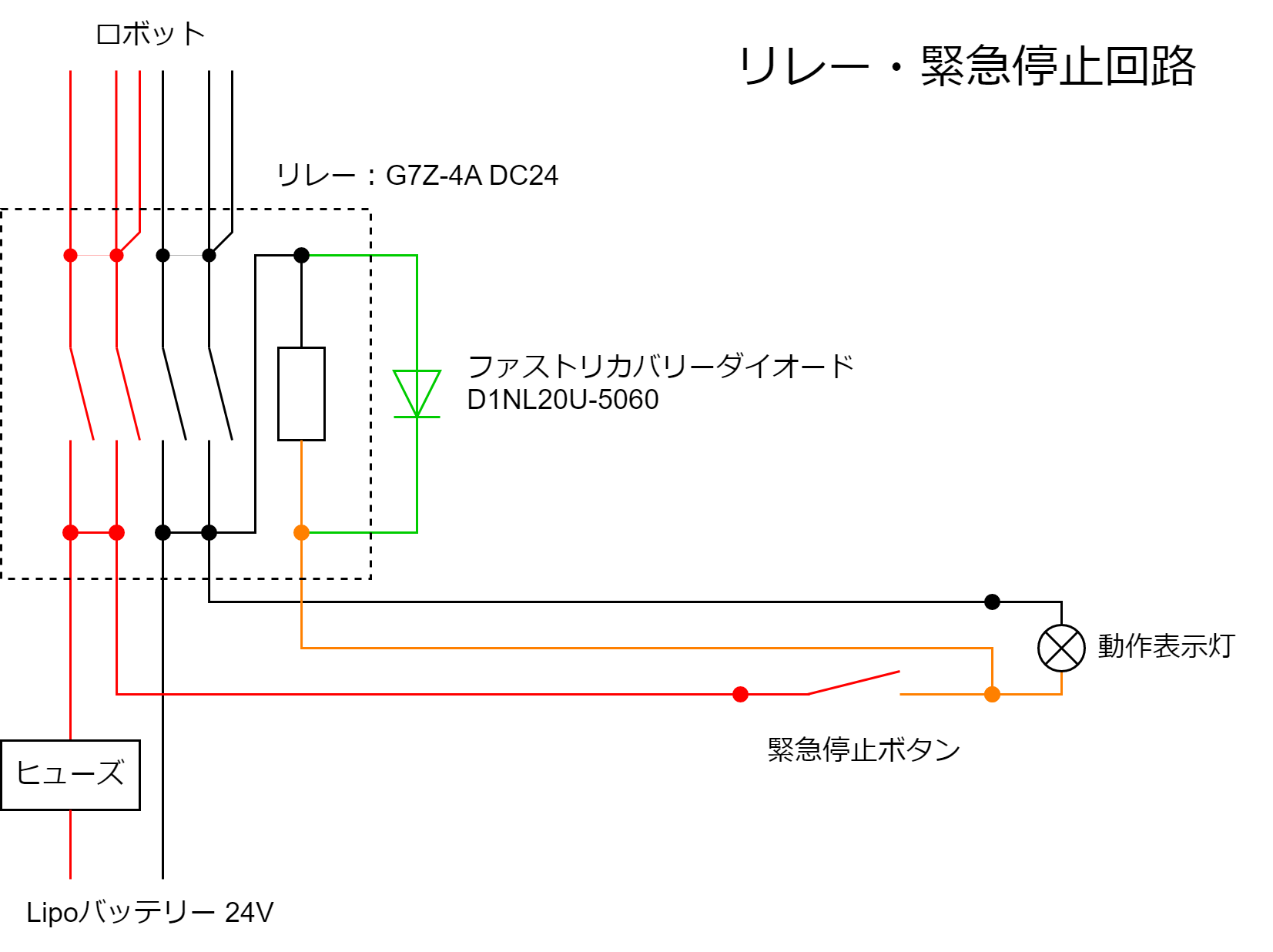
緊急停止時に電流を遮断できるようにリレーを使っています。リレーはオムロンのG7Z-4A DC24を使っています。採用の決め手はネジ端子があって基板を作らなくてよく、端子台にもなるからです。ただ許容電流は過剰ですね。リレーのコイルに対するフリーホイールダイオードとしてD1NL20U-5060を使っています。ちゃんとダイオードは入れましょう。感電します。というかしました。あぶないです。
ヒューズは自動車用のものを使っていて、ケーブルのように使えるものにしています。
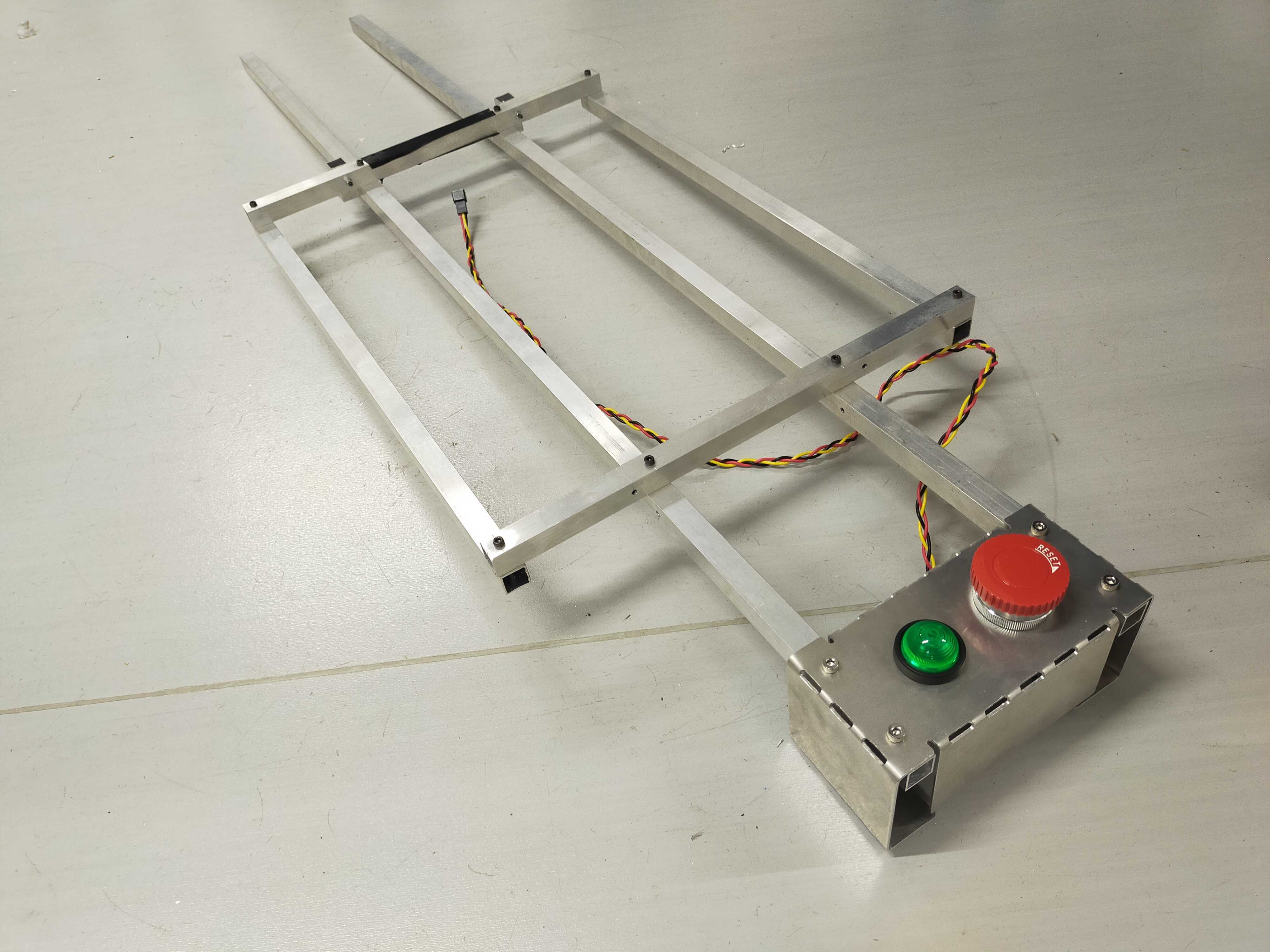
キャチロボのルール上、緊急停止ボタンと緑色の表示灯を付ける必要があるので、手元で押せて、手元で表示灯も確認できるようなものを作りました。これはPCを載せる台も兼ねています。
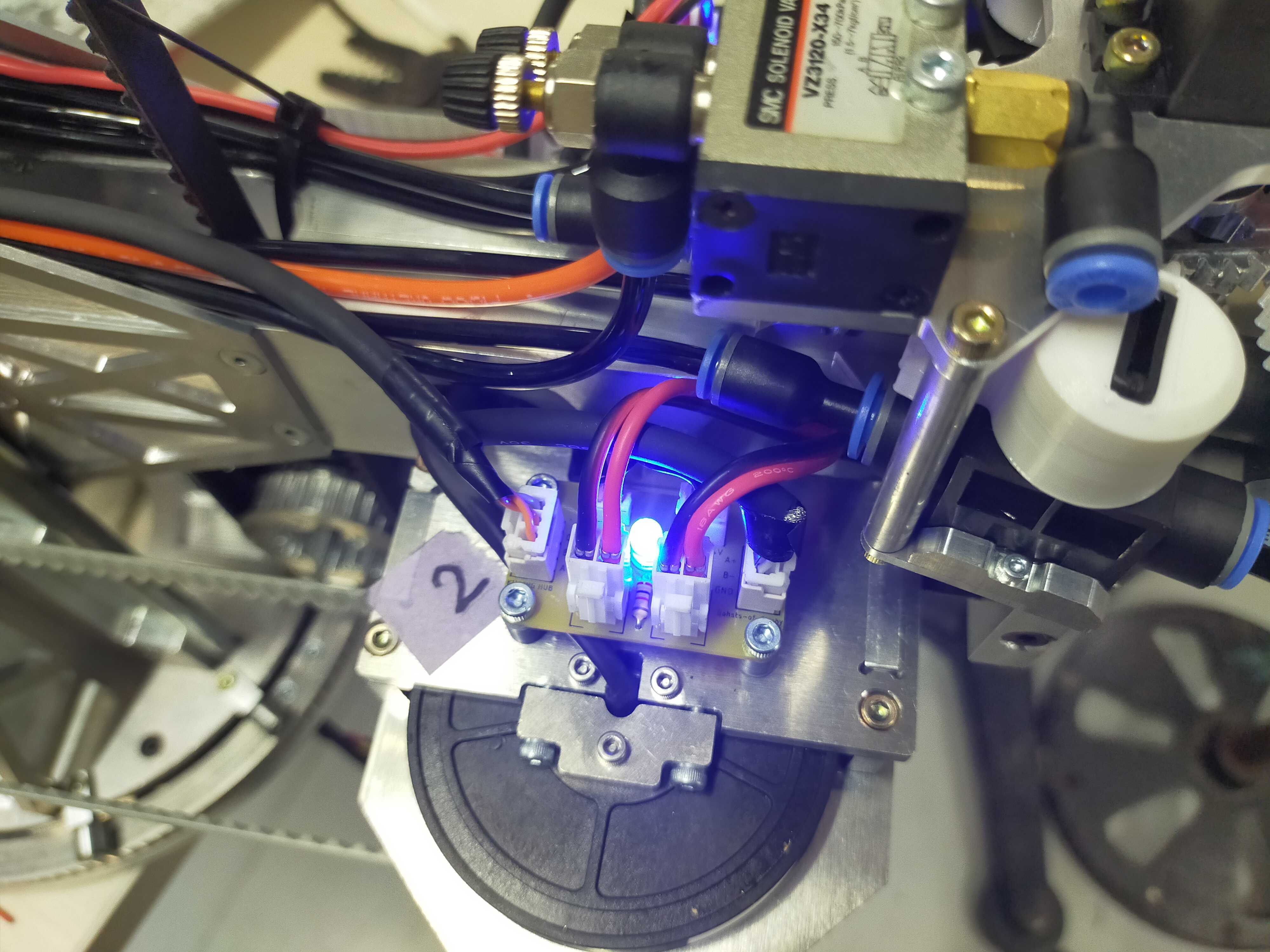
モーターなどをディジーチェーン的につなげるための基板です。コネクタとLEDがあるだけでシンプルです。できるだけコンパクトにしました。
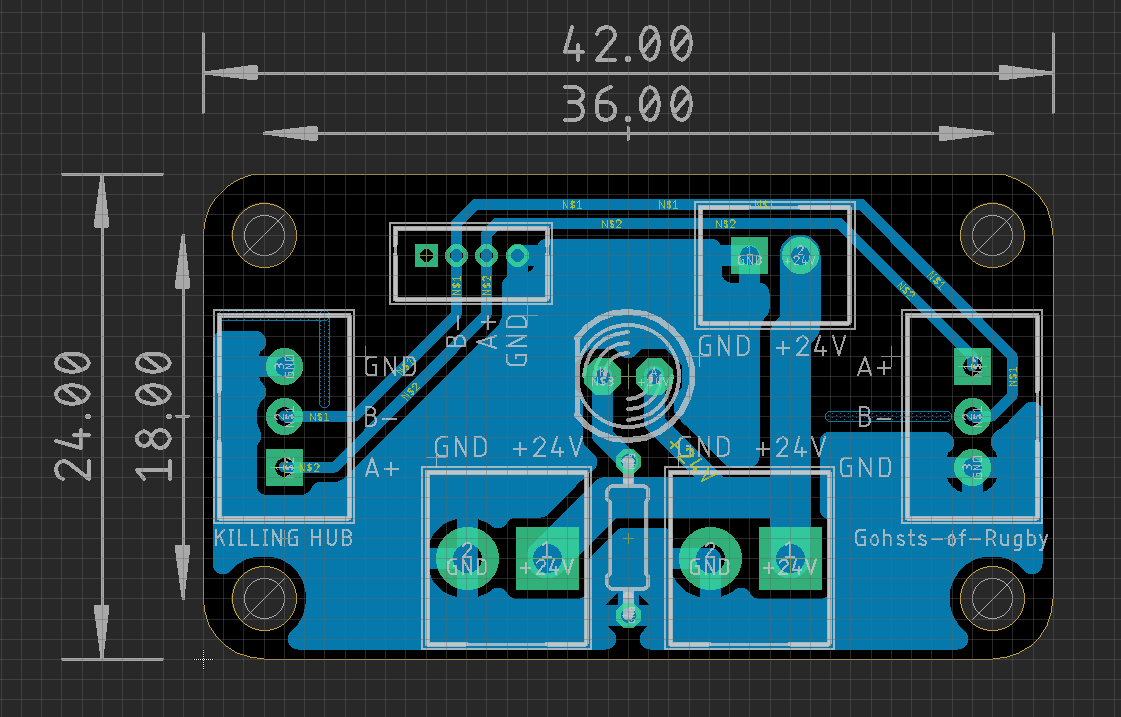
実際に機体に載せているところです。Elecrowで発注しています。
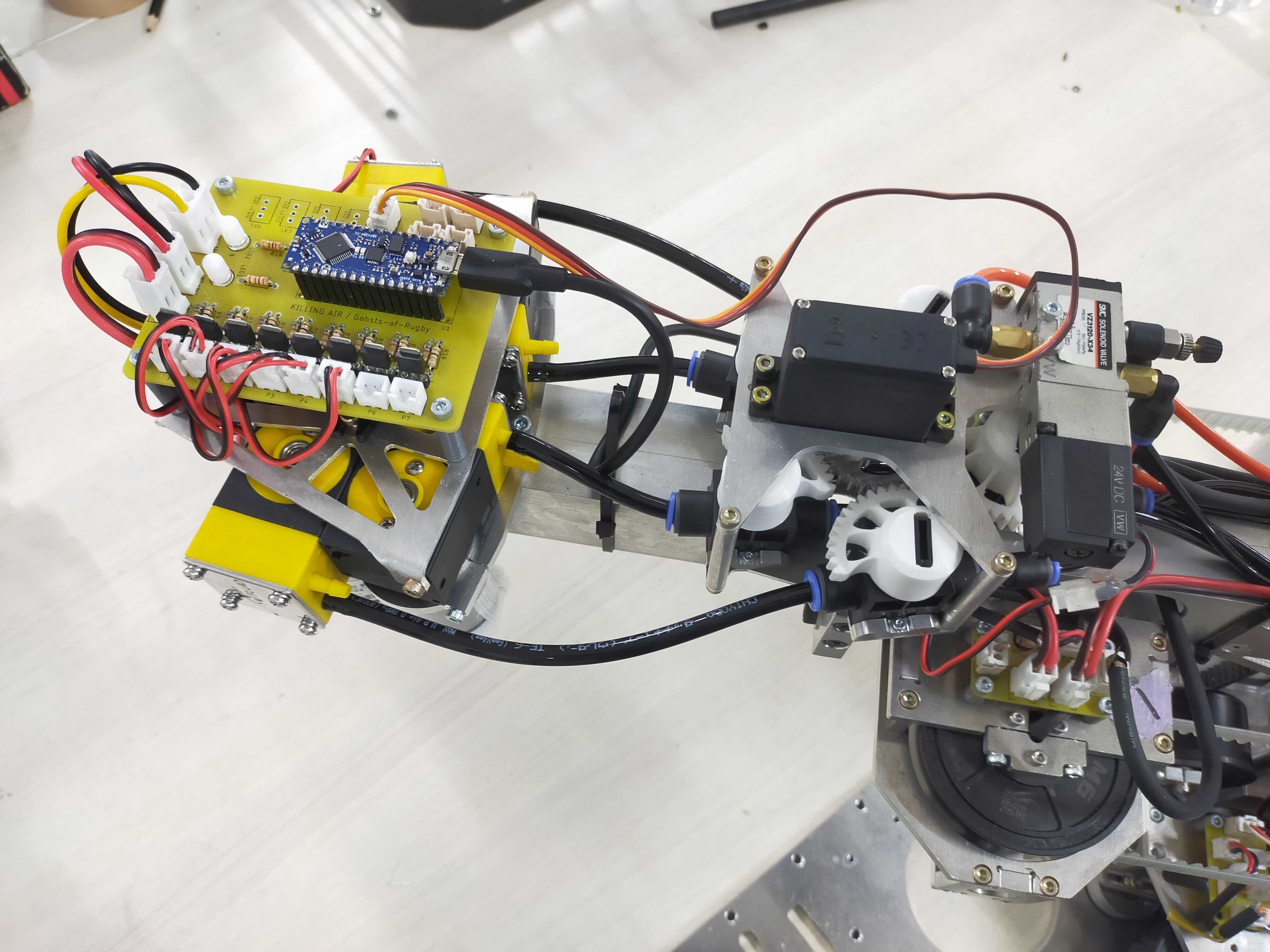
真空ポンプのスイッチングと、エンドエフェクタに使っているエアシリンダのための電磁弁、そしてサーボモーターを制御するための基板です。マイコンボードのArduino Nano Everyを載せています。真空ポンプと電磁弁のスイッチングはNch FETの2SK4017を使っています。
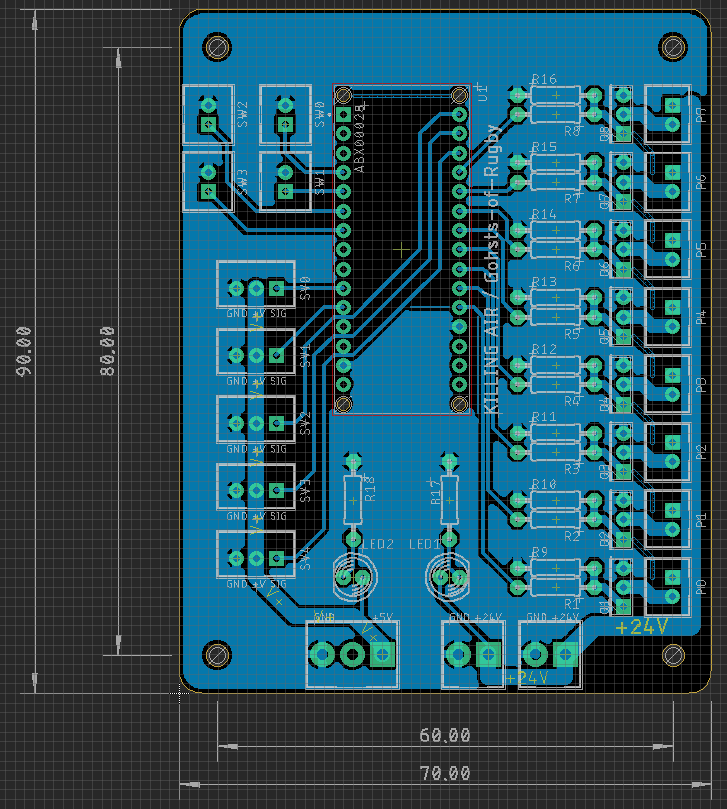
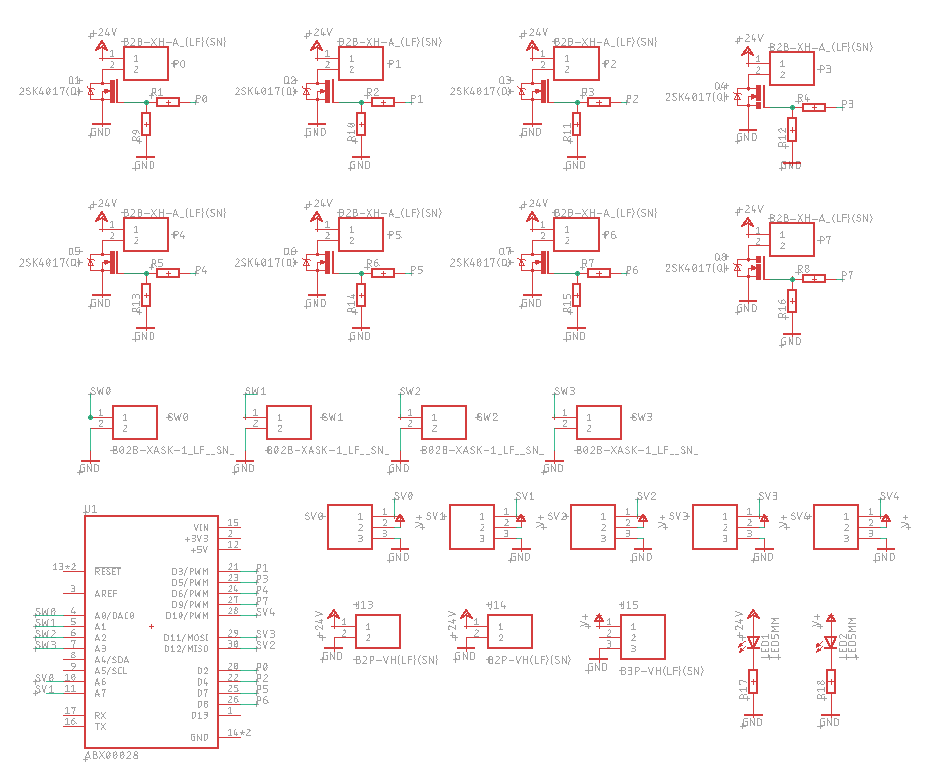
作った基板がこちらです。
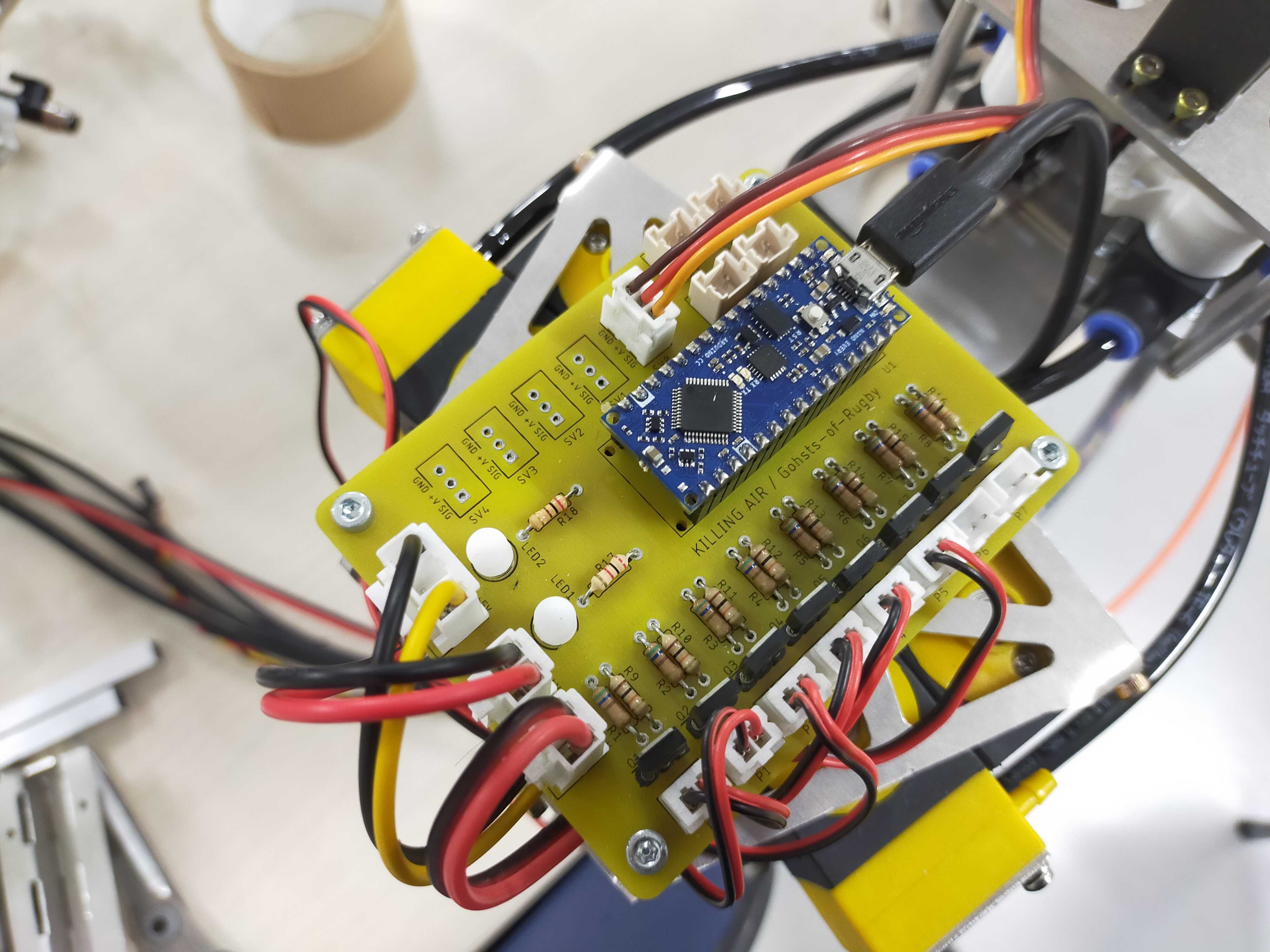
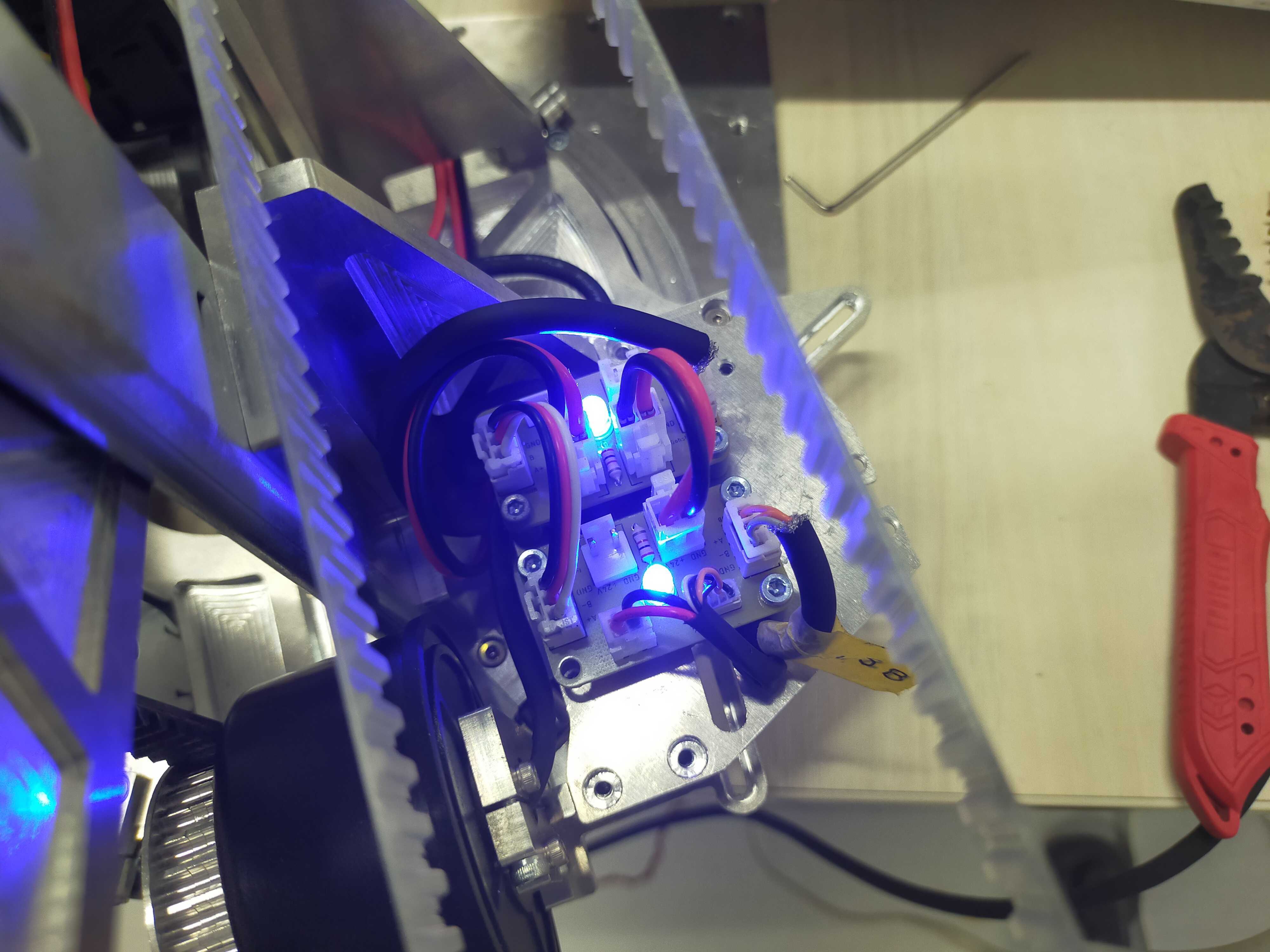
それを使っている様子です。真空ポンプ(左)、サーボモーター(右)、電磁弁(右)です。サーボモーター周りの機構についてはまた別の記事で。
基板「KILLNG AIR」についてですが、PCとの間のUSBケーブルで行うシリアル通信が切れるときがあるという問題があり、本番でもそれが起きてしまいました。また別の小型アーム(通称・爆速ハンド)を動かすために、もう1つ基板があったのですが、そちらはなぜかArduinoがアチアチになって壊れることがあるという問題がありました。
キャチロボのあと、工大祭(大学の学園祭)にて展示することになったため、この問題は解決したいと思いました。そのために考えうるすべての対策を施すことにしました。
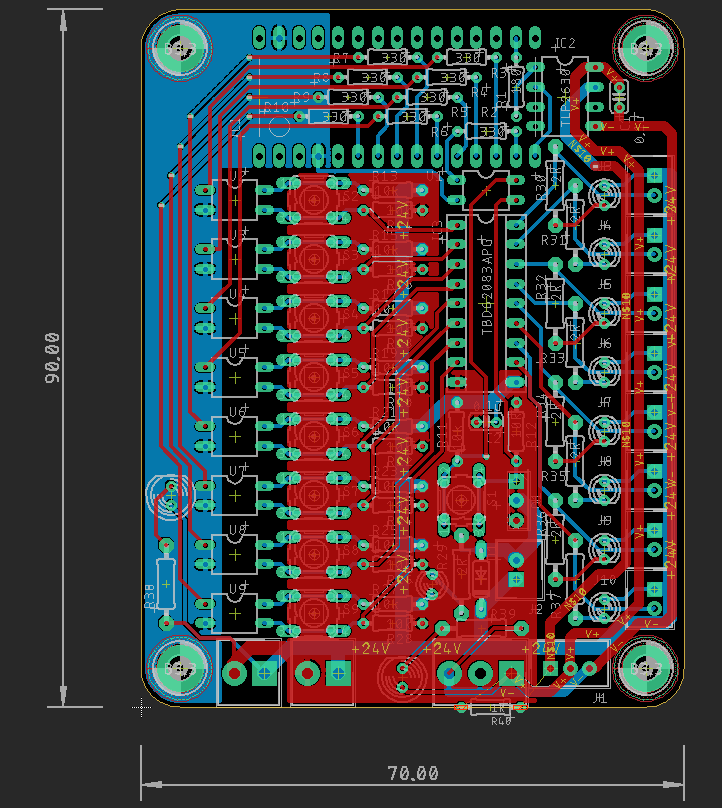
そしてできたのがこちら。新基板「KILLING NewAIR」です。
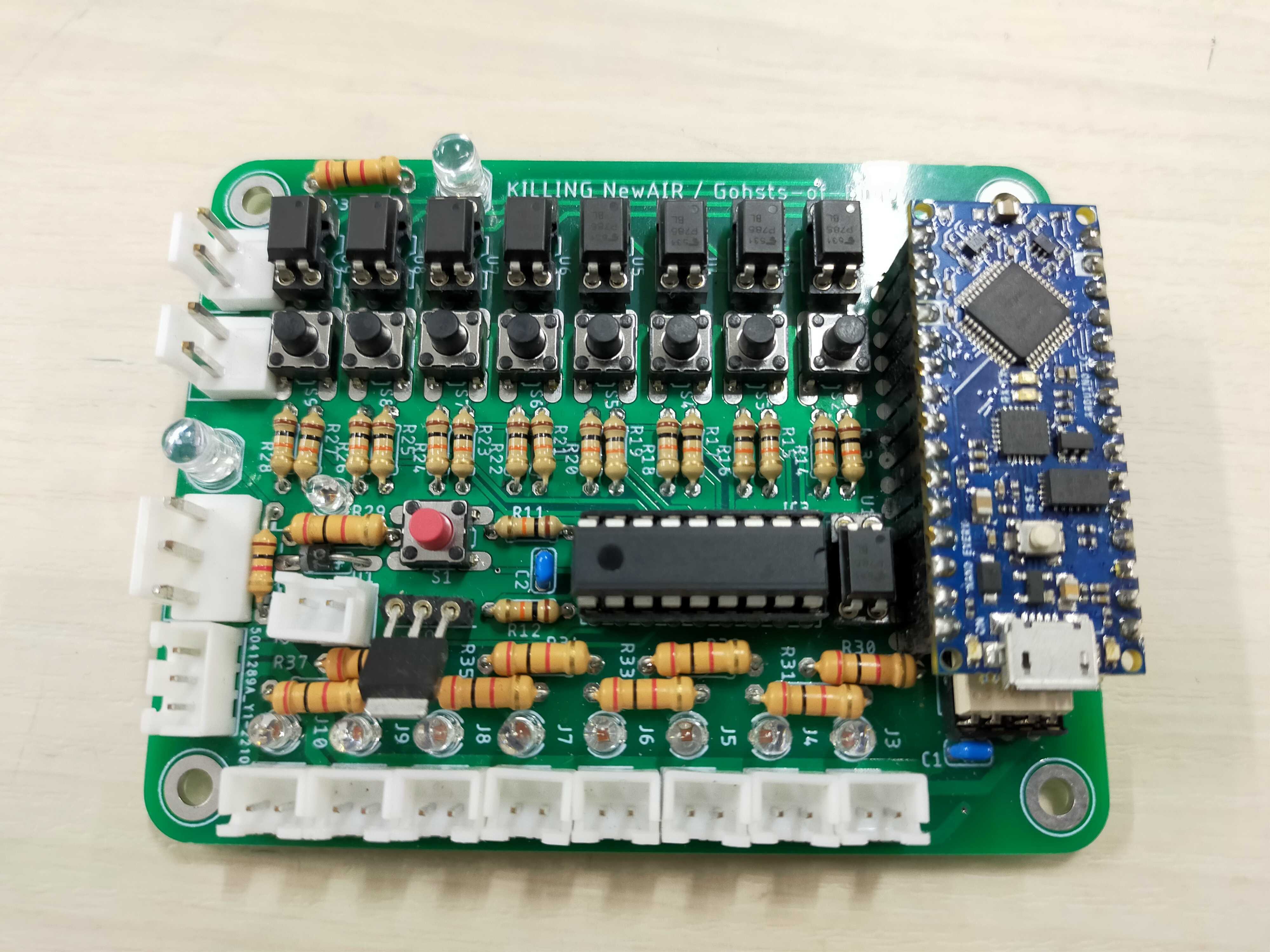
改善点は3点です。1点目はFETを変えたことです。真空ポンプや電磁弁のスイッチングにはトランジスタアレイのTBD62083APGを使うことにしました。まず旧基板では逆起電力の対策をしていなかったのですが、していないのはやはりまずそうと考えました。そこで、ダイオードが内蔵されており逆起電力対策がされているTBD62083APGを採用しました。
また「爆速ハンド」用に、どうしても1つ電流を5Aほど食うソレノイドを動かす必要があったため、そこにはMTB30N06I3というFETを用いています。形や値段は同じなのに、2SK4017のドレイン電流が5Aでギリギリだったのに対し、MTB30N06I3とすると22Aとなり余裕があります。こちらには逆起電力対策としてダイオード1S10を別付けしました。
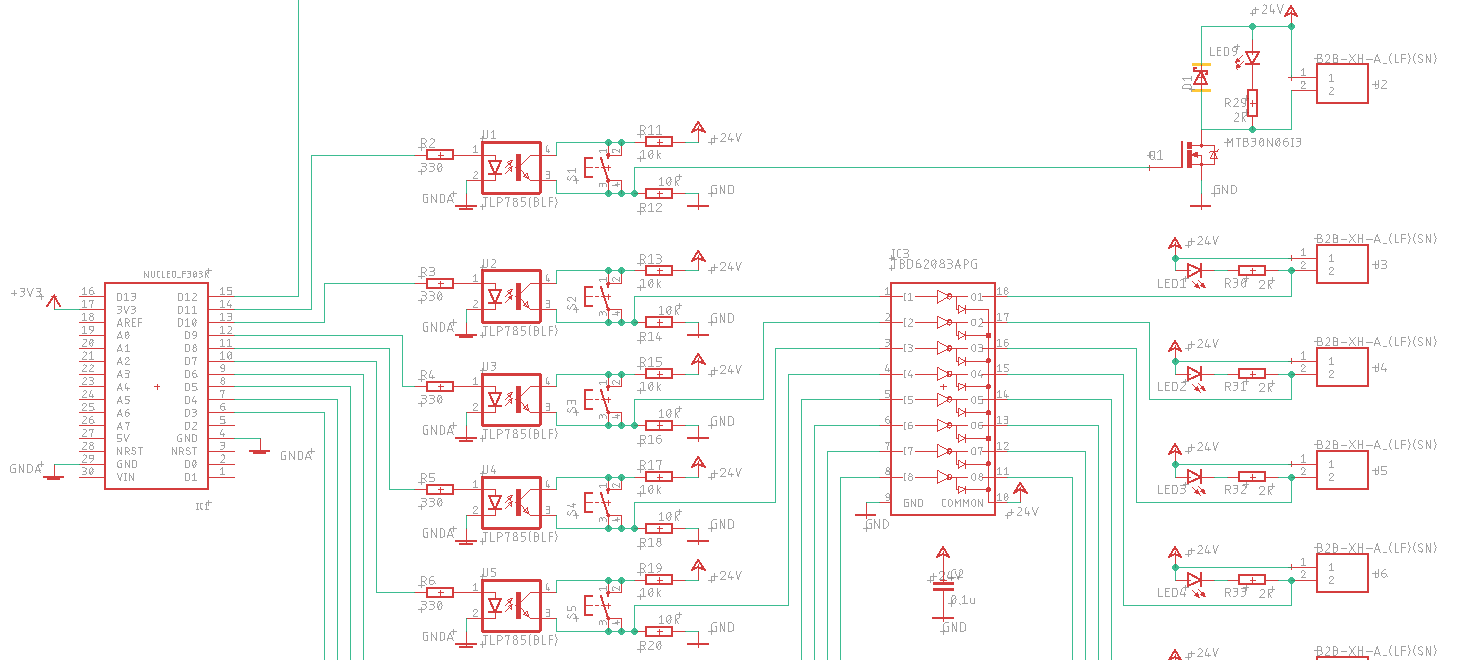
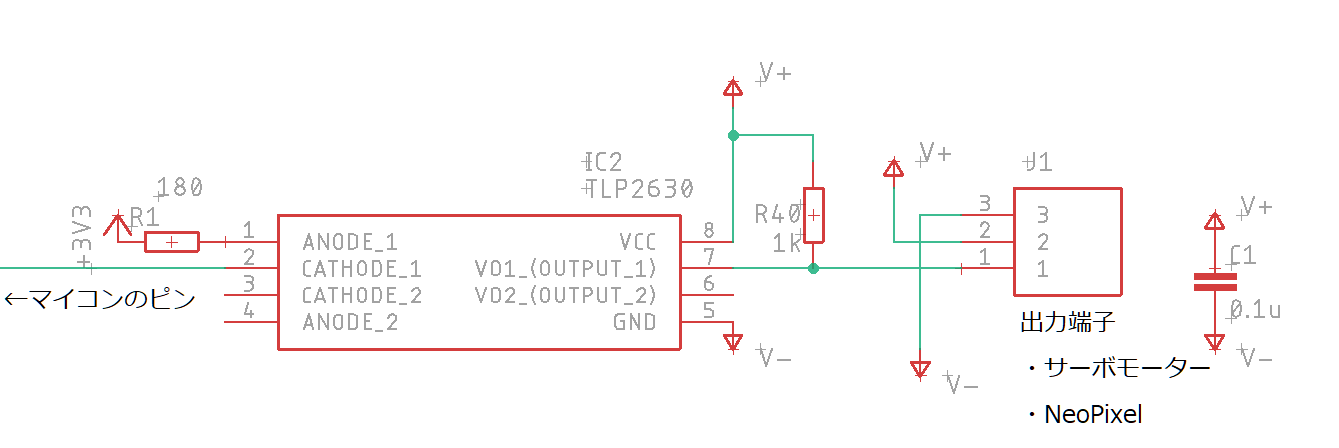
2点目はマイコンとそれ以外を完全に絶縁したことです。強電側(24V)のノイズ等が通信に悪影響を及ぼしているかもしれないという予想のもと、この対策を行いました。トランジスタアレイやFETについてはフォトカプラTLP785を用いています。またサーボモーターを接続したり、工大祭用に電飾としてLEDテープ(NeoPixel)をつけたりしたい、ということで、ここには高速通信が可能なフォトカプラTLP2630を採用しました。
3点目はユーザーにやさしい機能の追加です。タクトスイッチを押すとポンプや電磁弁が動いたり、機器をONにしているときは赤色のLEDがつくようにしました。
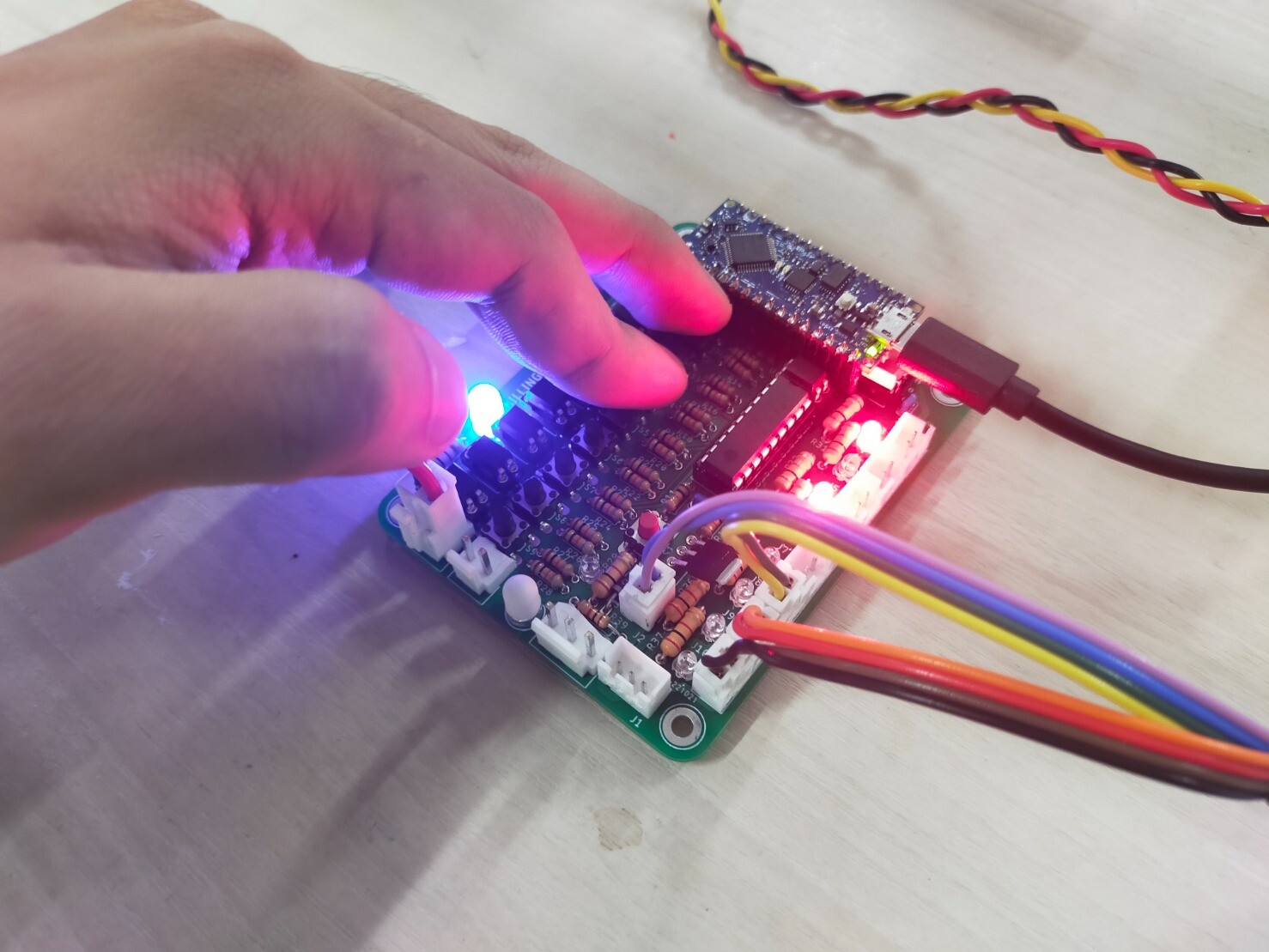
これらの対策の結果として、工大祭では回路のトラブルは一切なく2日間動き続けました!通信トラブルもほぼなかったそうです。
こういうところはさぼっちゃいけないということが身に染みてわかりました。
2パートにわたって、私が担当した直動回転差動機構と電装の紹介をしました。
次回以降、KIRINに搭載した面白機構や制御についての紹介記事が続きます!今後の記事もお楽しみください。


