みなさんこんにちは、2018年度入学、M2のたくぽんです。
この9月に京都で開催された、「第13回キャチロボバトルコンテスト」に参加してきました!
サークル内の有志2人で集まり、チーム「じゃがビーの亡霊」として出場しています。自分は機械設計・加工すべて、電装を担当しました。
結果としてはベスト4で、審査員賞をいただきました!
今回の記事では、出場機体の全体的な紹介をしていきます。
以降もキャチロボ機体の紹介記事を書く予定なのでお楽しみに!
コンセプト&機体概要 👈この記事
エンドエフェクタの製作詳細 そのうち出ます
XYテーブルの製作詳細 そのうち出ます2
参加経緯
私たちは去年もキャチロボに出場しており、「ラグビーの亡霊」というチーム名で参加していました。しかし、大会当日は通信関連の不調で思うような動作ができず、煮え切らないまま大会を終えます。去年の大会は「じゃがりこ」を扱う大会だったので、ラグビーでもじゃがりこでも引退できなかった、「じゃがビーの亡霊」として再度大会への参加を決意します。

ところで、去年はロボコンチームMaquinistaのOB4人で参加していました。しかし就職や留学で参加できるメンバーが減り、結局修士2年生ふたりで参加することになりました。修論?まだ早い。
軽くルール紹介
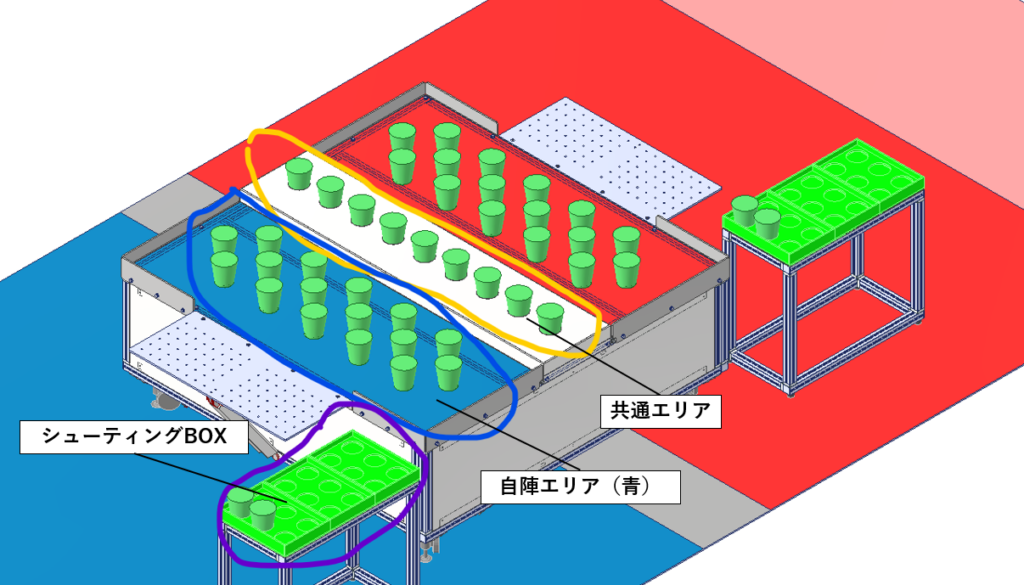
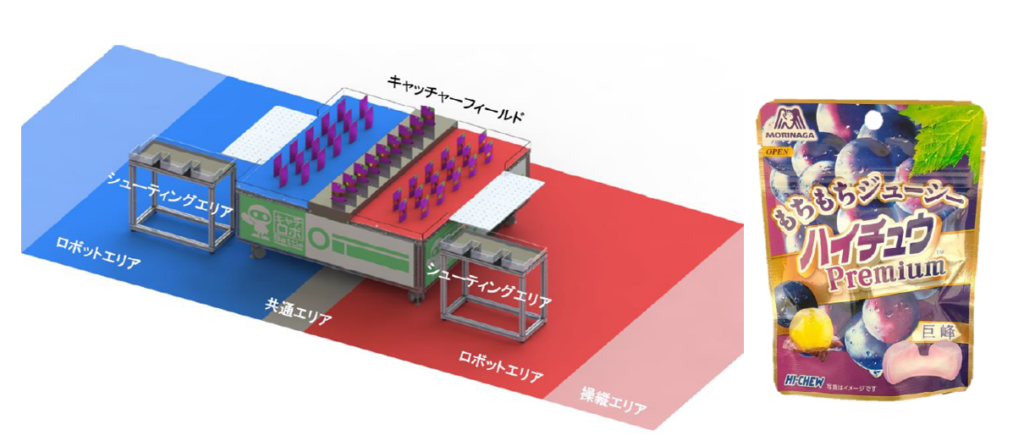
キャチロボはお菓子をワークとして扱うのが特徴の大会ですが、今年のワークは「ハイチュウプレミアム」です。フィールドに並べられたハイチュウを回収し、既定の場所に並べて置いていきます。制限時間3分間で、ワークを並べて得られる得点を競います。
今年のルールでは、不安定なパウチ形状のワークをどう回収し、綺麗に整列させるかが肝となりました。
つくった機体
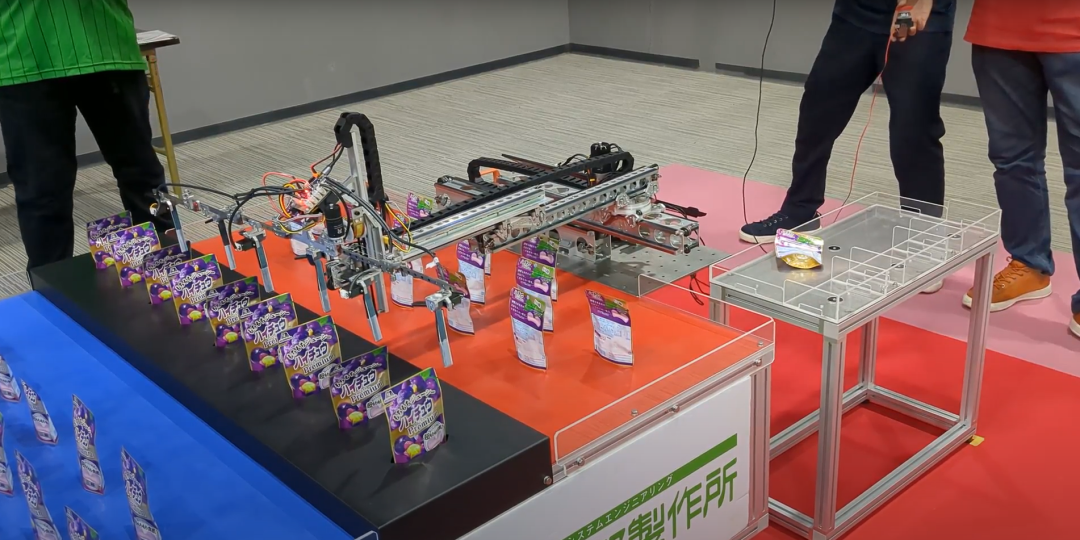
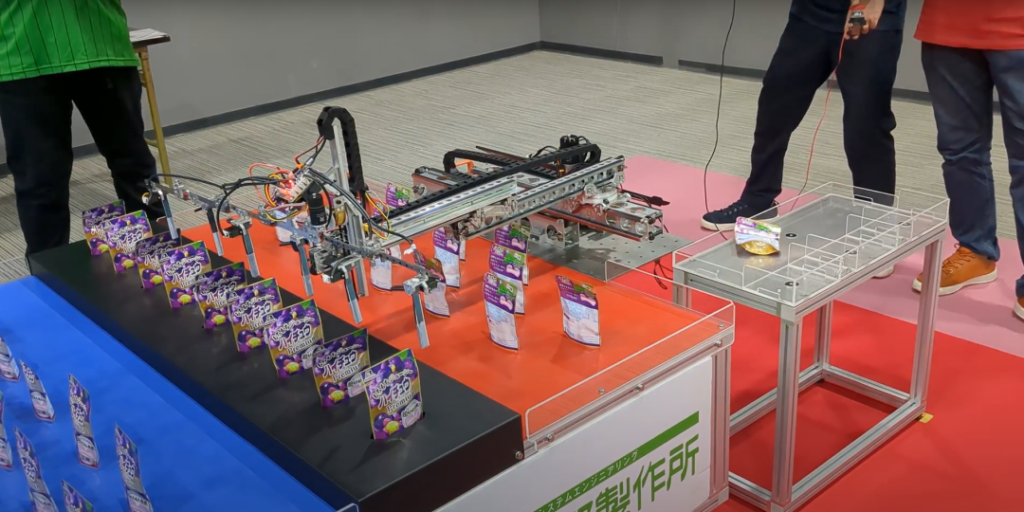
まずは大会でのロボットの動きを見てください!青チームです!
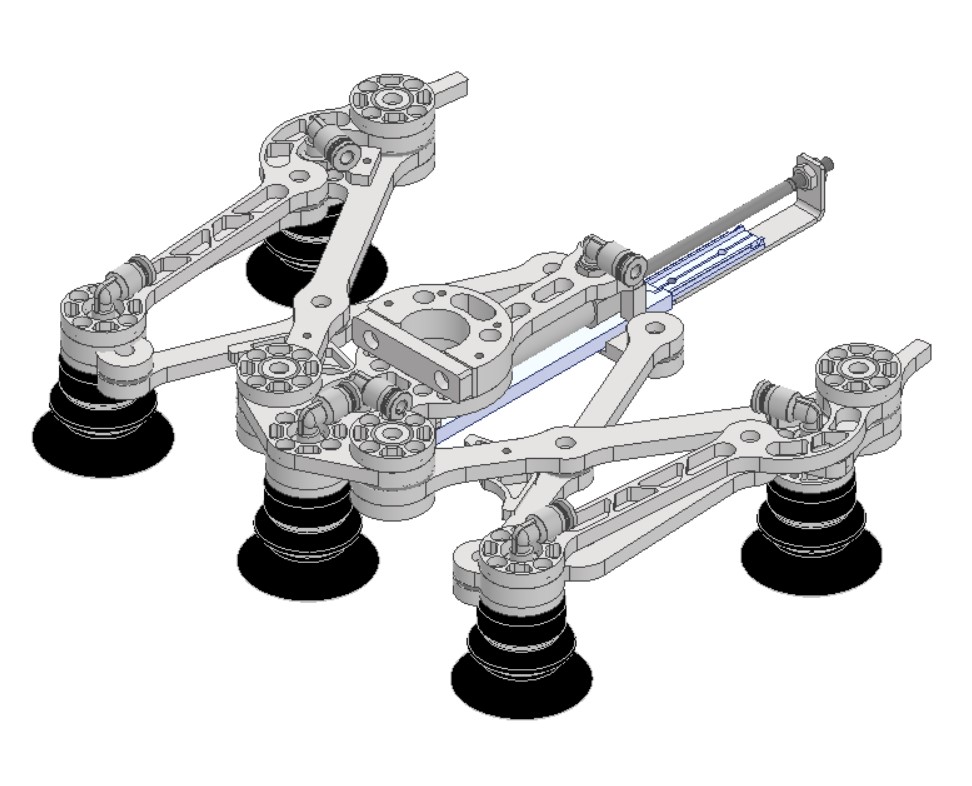
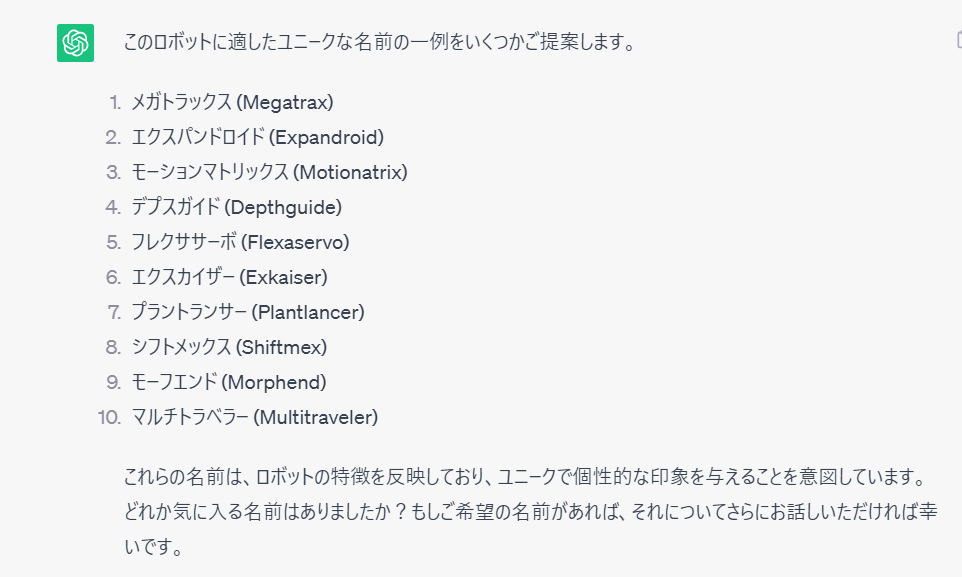
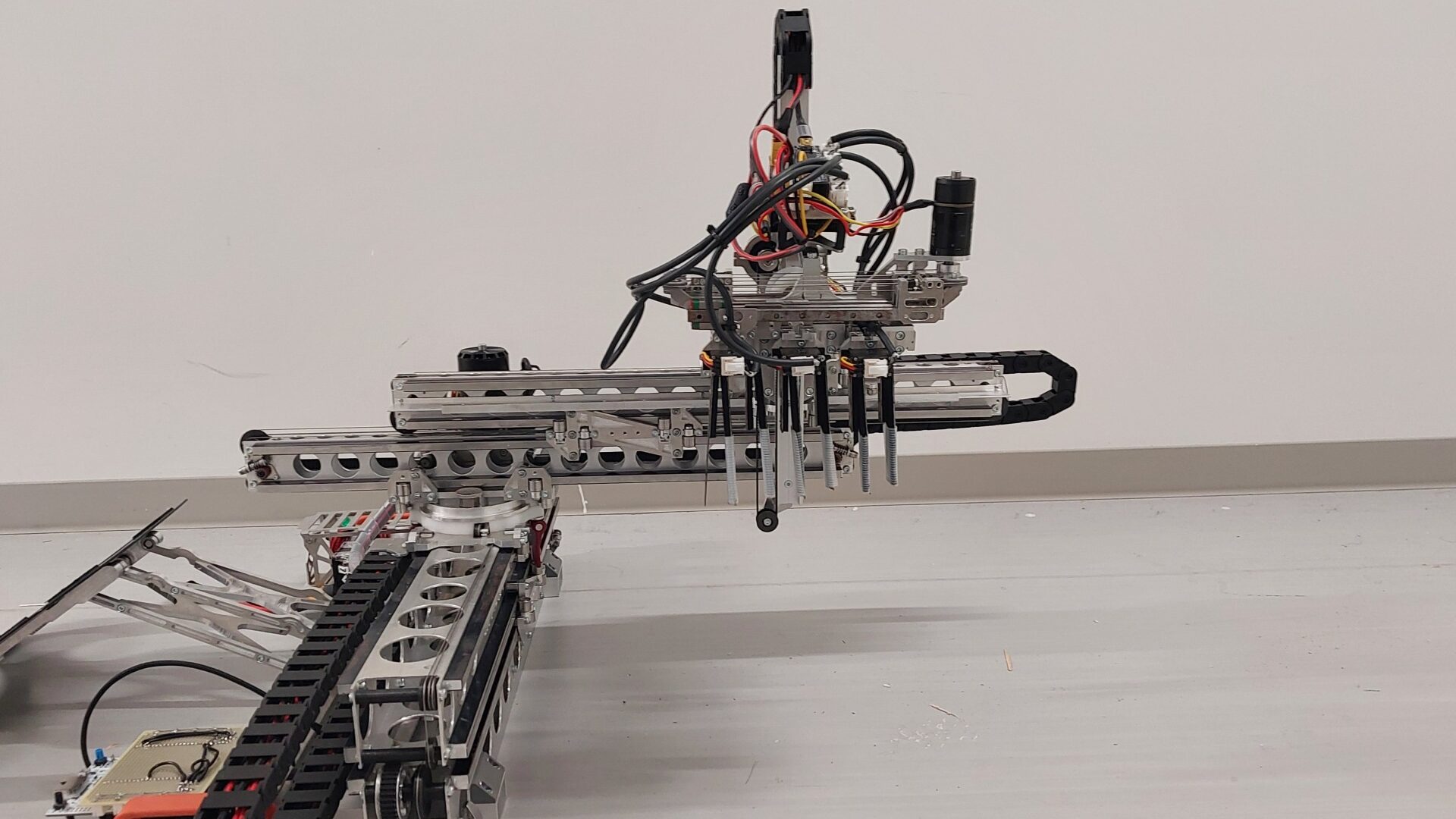
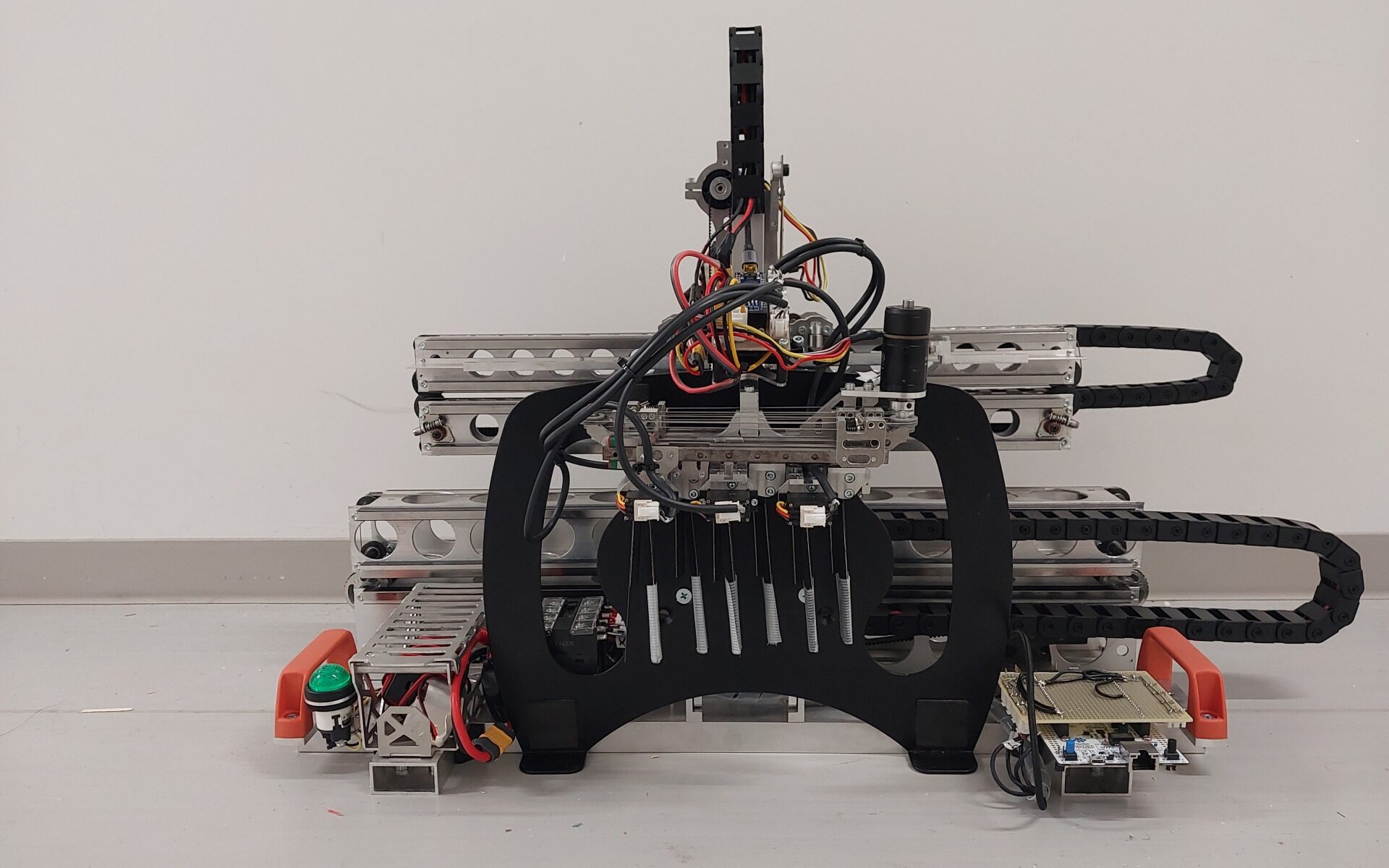
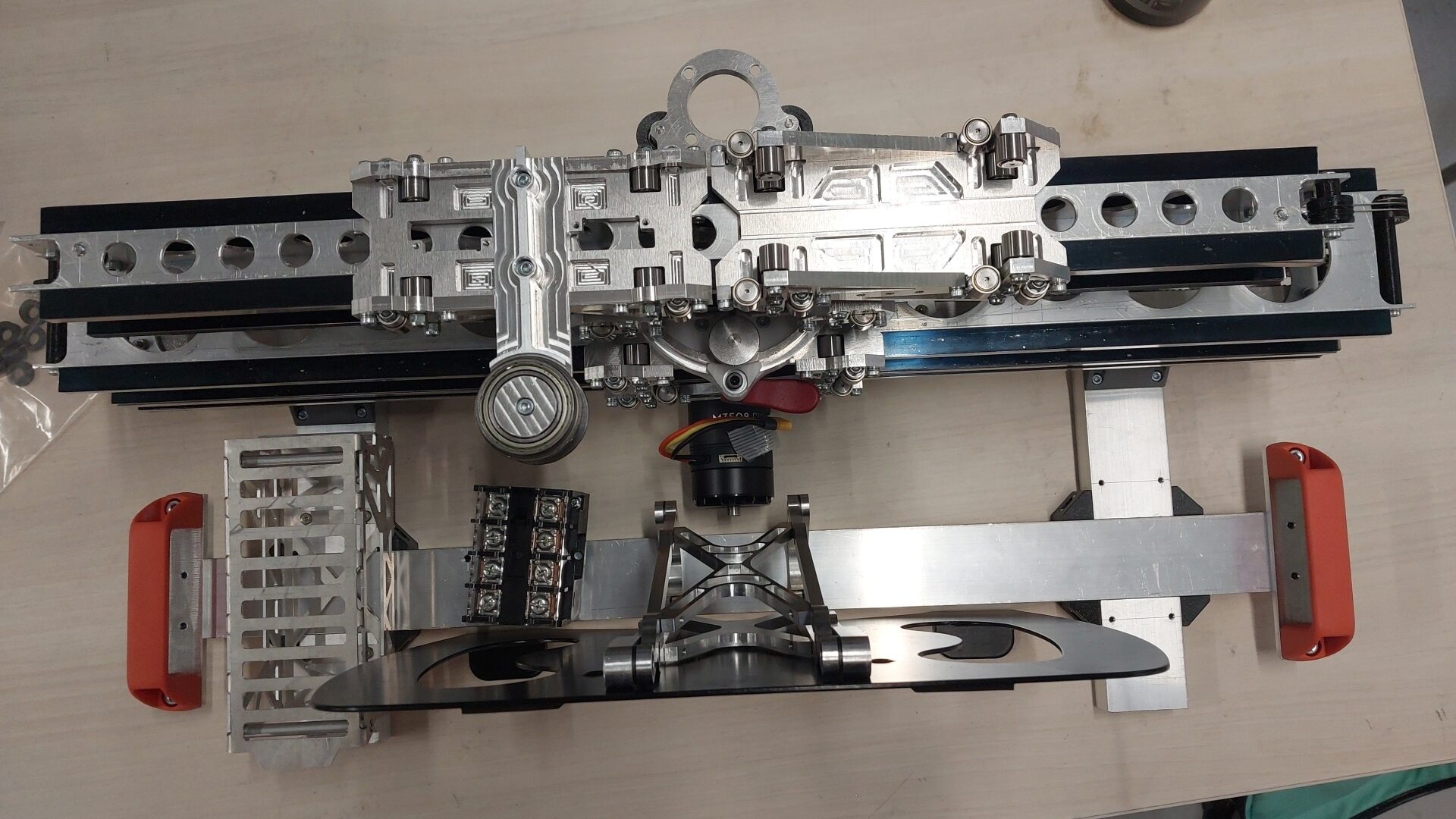
伸展するXYZテーブル、大きく拡縮するエンドエフェクタが特徴です。ごつく見えますが、総重量はPC込みで10kgとそんなに重くないです。
めっちゃいろんなところが伸び縮みするので、この子は「Expandroid」と名付けられました。
↓ぐりぐりして見れる3Dモデルはこちら!Inventor2022形式の拘束がちゃんとされてる設計データ(zip形式)はここにアップロードしてます。詳細気になる方はダウンロードしてね!なにか気になるところあれば@takupon009までDMくれればウキウキでおへんじさせていただきます。
機体紹介!
開発コンセプト
キャチロボに参加するのも2年目なので、去年の機体の反省を踏まえて機体のコンセプトを立てます。
メンバーと話し合った結果、以下の項目を満たすロボットができると良いよね!となりました。
- 去年はロボットがでかすぎ,重いし運ぶのが大変だから小さくしたい!
- Q:宅急便で発送すればよいのでは??
A:ロボットを大会前に余裕をもって完成できる計画性を持ち合わせてるとお思いか?
- Q:宅急便で発送すればよいのでは??
- 去年は円筒座標型ロボットで出たから,今年は直交座標型ロボットにしたい!
- 直交座標系のロボットでコンパクトに作るの大変そう(𝒀𝑨𝑹𝑰𝑮𝑨𝑰 𝑷𝒐𝒊𝒏𝒕)
- 直交座標系のロボットでコンパクトに作るの大変そう(𝒀𝑨𝑹𝑰𝑮𝑨𝑰 𝑷𝒐𝒊𝒏𝒕)
- 去年と同様に,エンドエフェクタひとつでいろんな場所のワークに対応する!
- 去年大活躍してた独立して動くアームが2つあるロボット(2コア2スレッドロボって呼んでました)も考えましたが、アームを複数つくるリソースが無さそうなので見送り
- 去年大活躍してた独立して動くアームが2つあるロボット(2コア2スレッドロボって呼んでました)も考えましたが、アームを複数つくるリソースが無さそうなので見送り
- 去年は激安モーターを使って苦労したので,まともなモーター使う!
- 去年使ったMD内蔵6000円DDモータはメカ的にも制御的にも非常に辛い思いをしたので、今年はみんな大好きロボマスモータを使うことにしました。
個人的な思想としては、NHKロボコンに出てたときから「かっこいい」「美しい」ロボットを作るぞという思いがありました。自分は機械屋さんなので作ったロボットを制御屋さんに渡して動かしてもらうのですが、ロボコンなのでまあ徹夜進捗が多発します。そういう大変な状況でも、愛想をつかされない程度にはかっこいいものを作るのが機械屋さんの責務だと思っています。
しっかり考えて作ったものは自ずと機能美が現れてくるものだと信じているので、”こだわりを捨てずに作る”、”納得できるものを作る”ということを意識して設計製作しました。
“納得”はすべてに優先するぜッ
ここからロボットの各要素の紹介です!
エンドエフェクタ
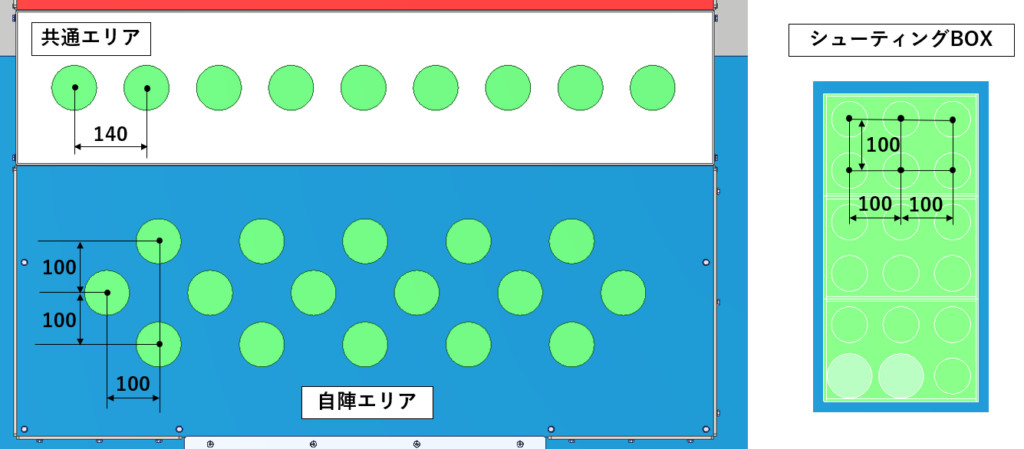
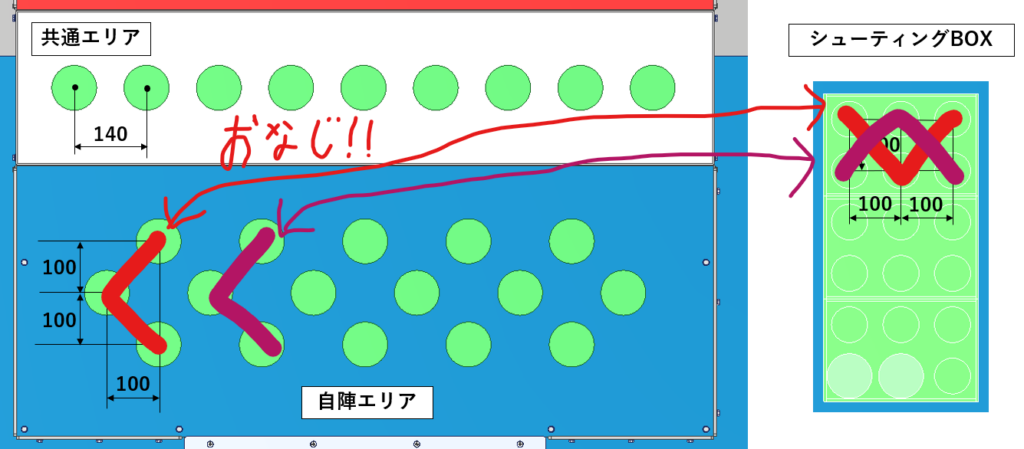
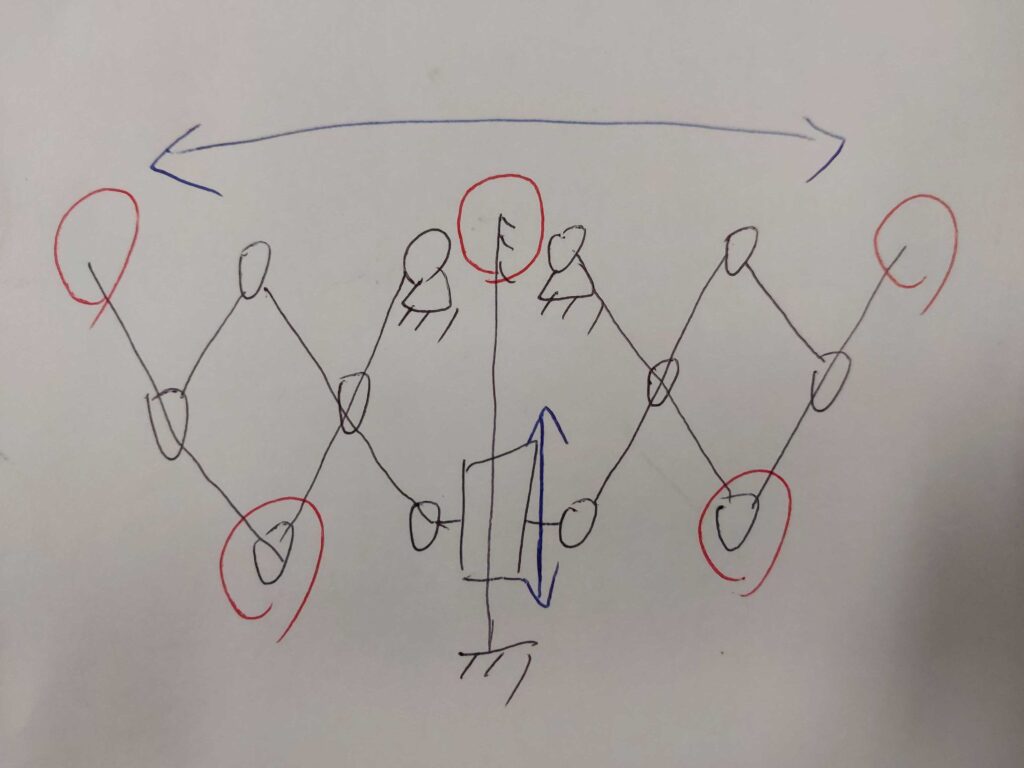
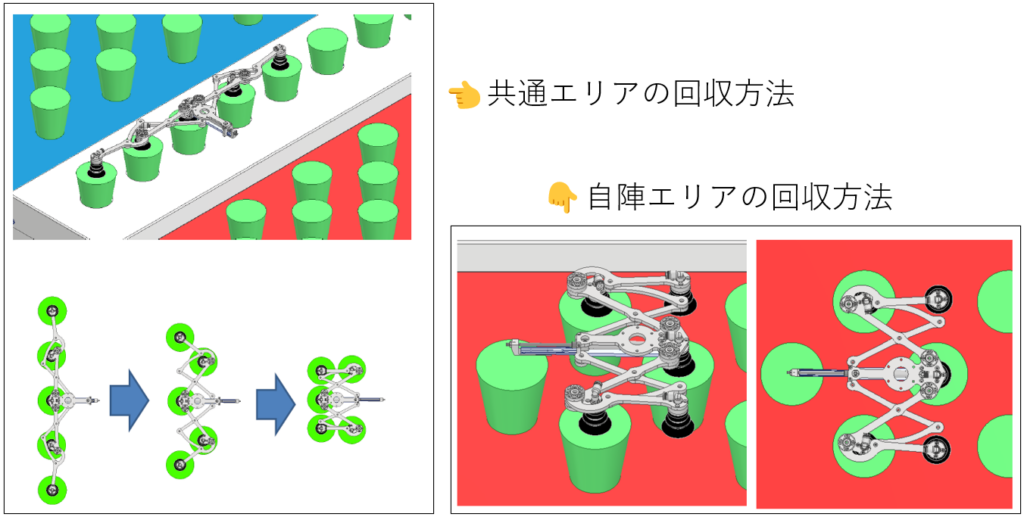
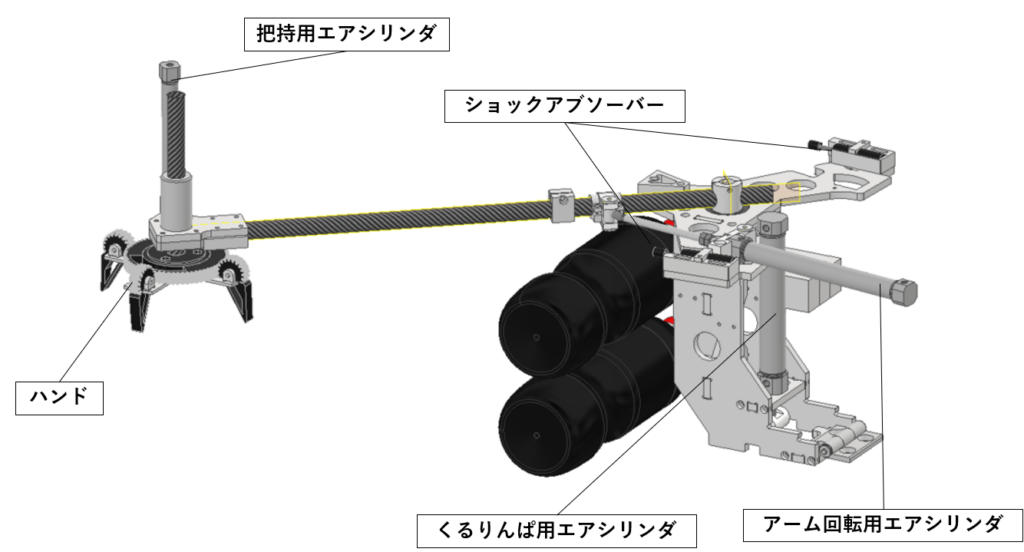
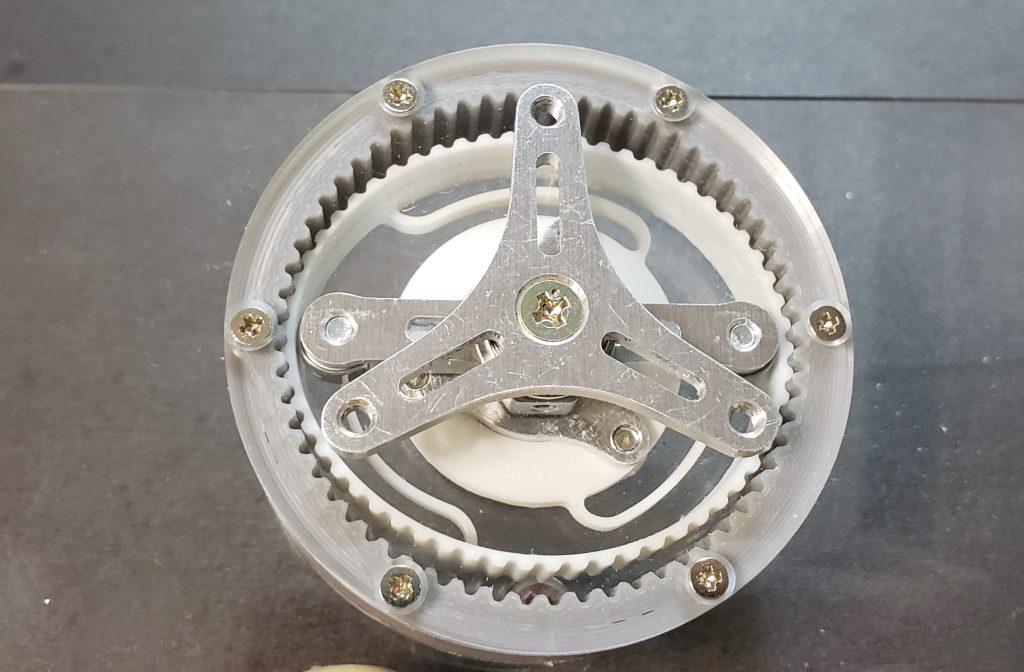
共通エリア、自陣エリア、シューティングエリアで、ハイチュウの並んでいる間隔が違います。これら全部に1つのエンドエフェクタで対応できるように、独立で動く6つのハンドの間隔を自由に伸縮できる構造を採用しました。1モーターのワイヤ駆動で、等間隔を保ったままハンドの位置が変わります。
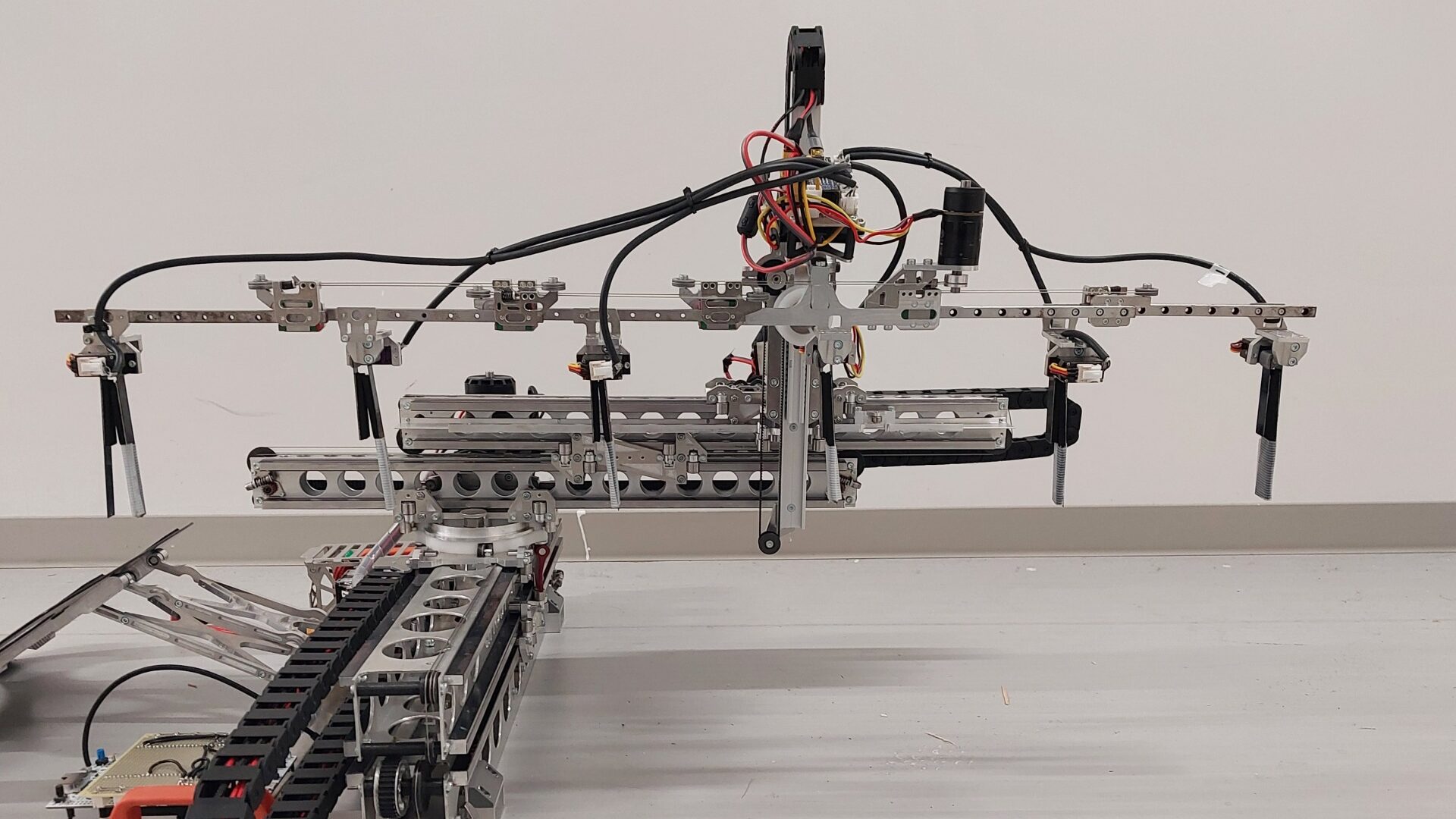
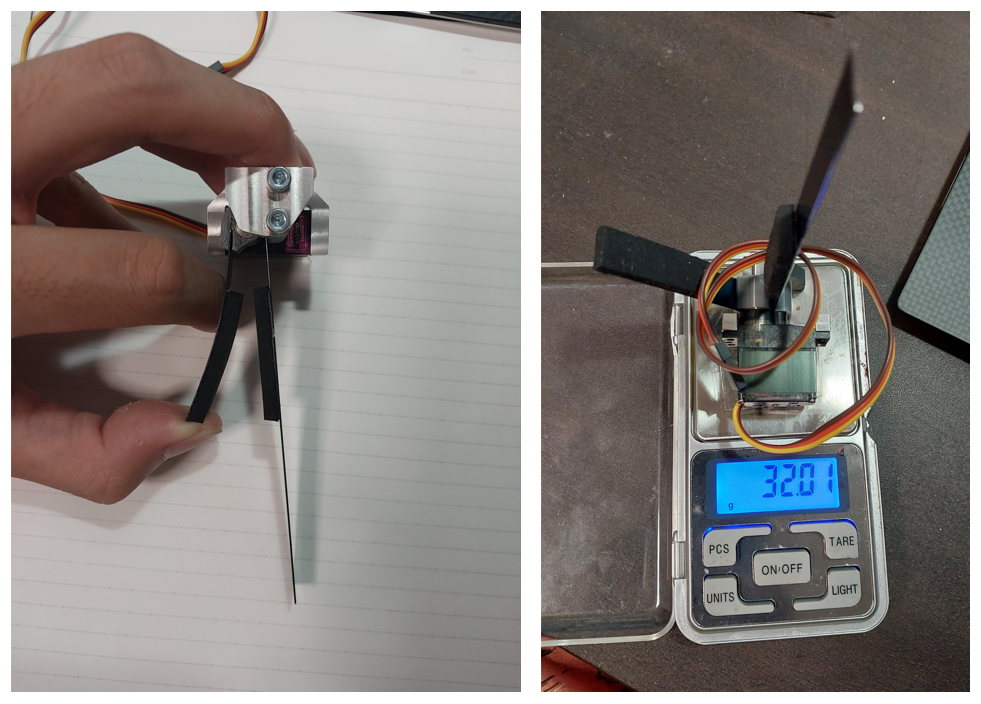
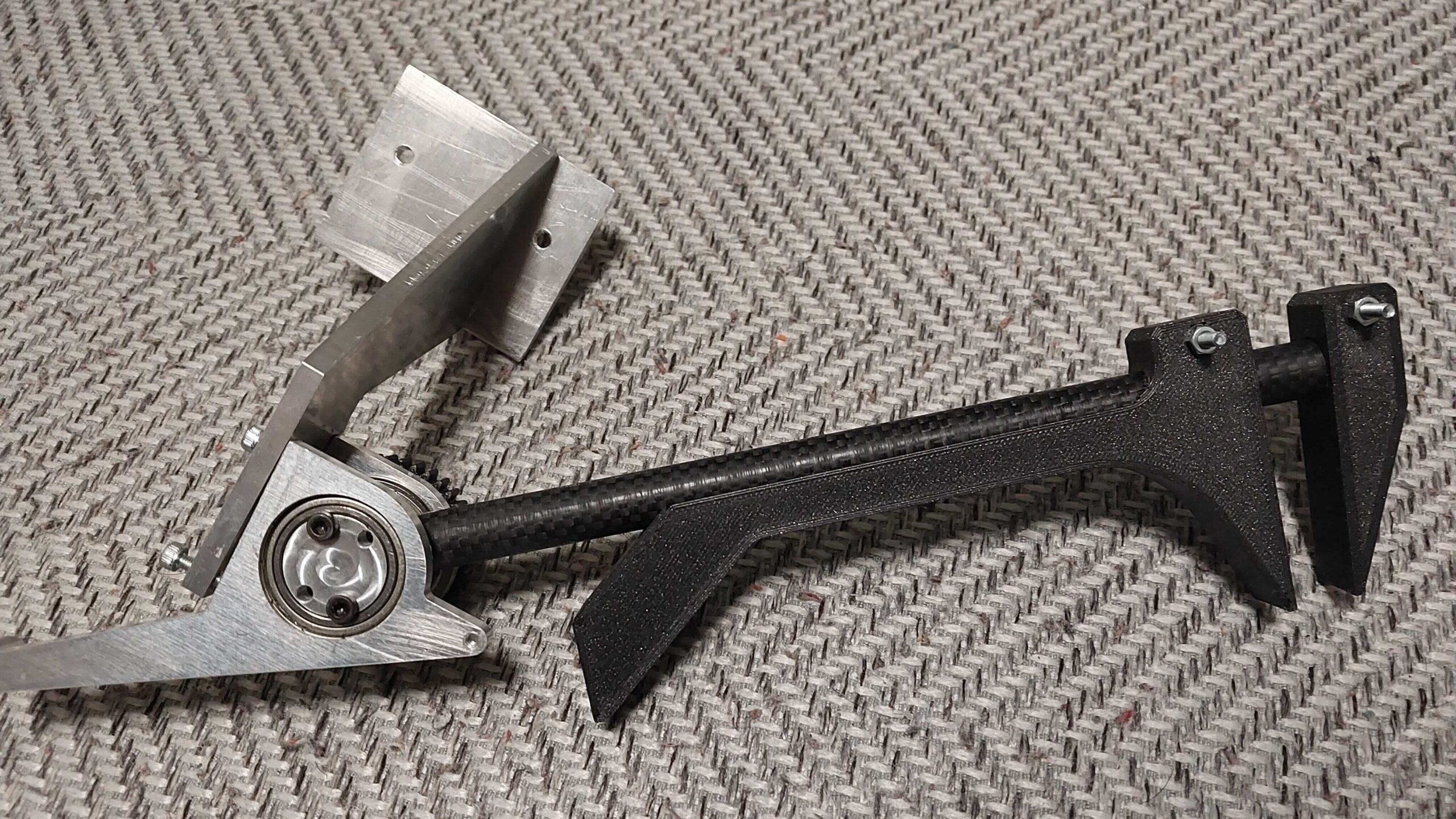
ハイチュウはサーボで開閉するハンドを使って、上から挟んで回収します。
ハンドの開閉部分は、固定側にはt0.5mm、動く側にはt0.3mmの焼き入れリボン鋼を使って作っています。しなる素材を使うことで、裾が広がっているパウチの形状にうまくフィットしてしっかり把持してくれます。
滑り止めにはウェットスーツの生地を使っています。柔らかくびっくりするほど摩擦係数が大きいうえ、裏側(人肌側)が布地なので接着が簡単ですごい便利です。
細かい設計の話はまた別の記事で書きます!お楽しみに!
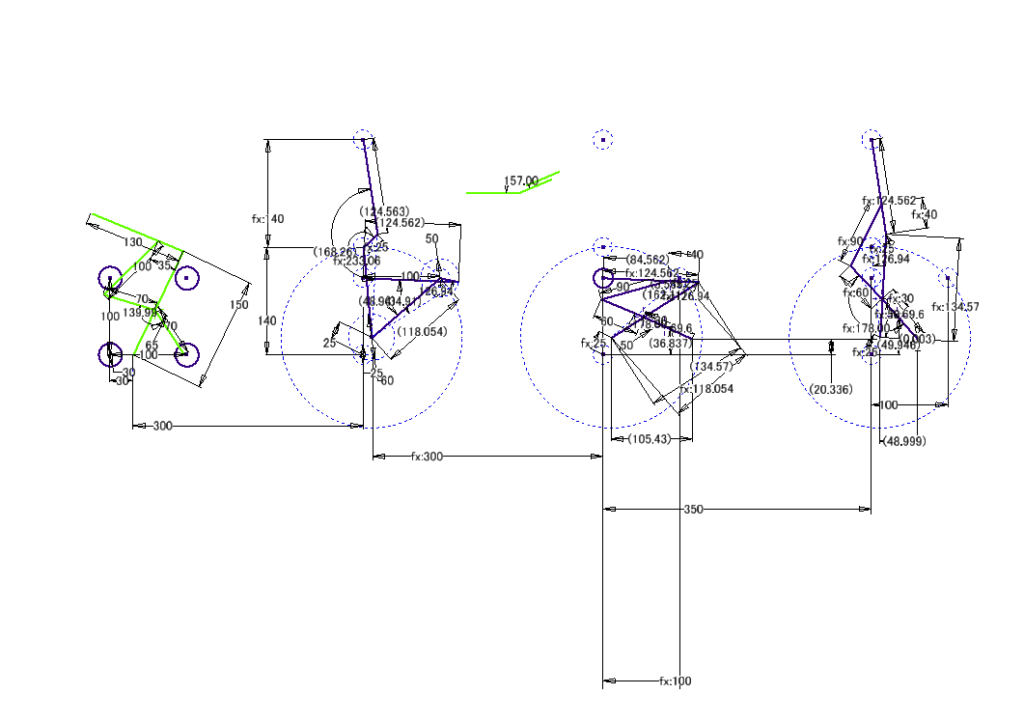
XYテーブル
今回一番気合を入れた部分です。
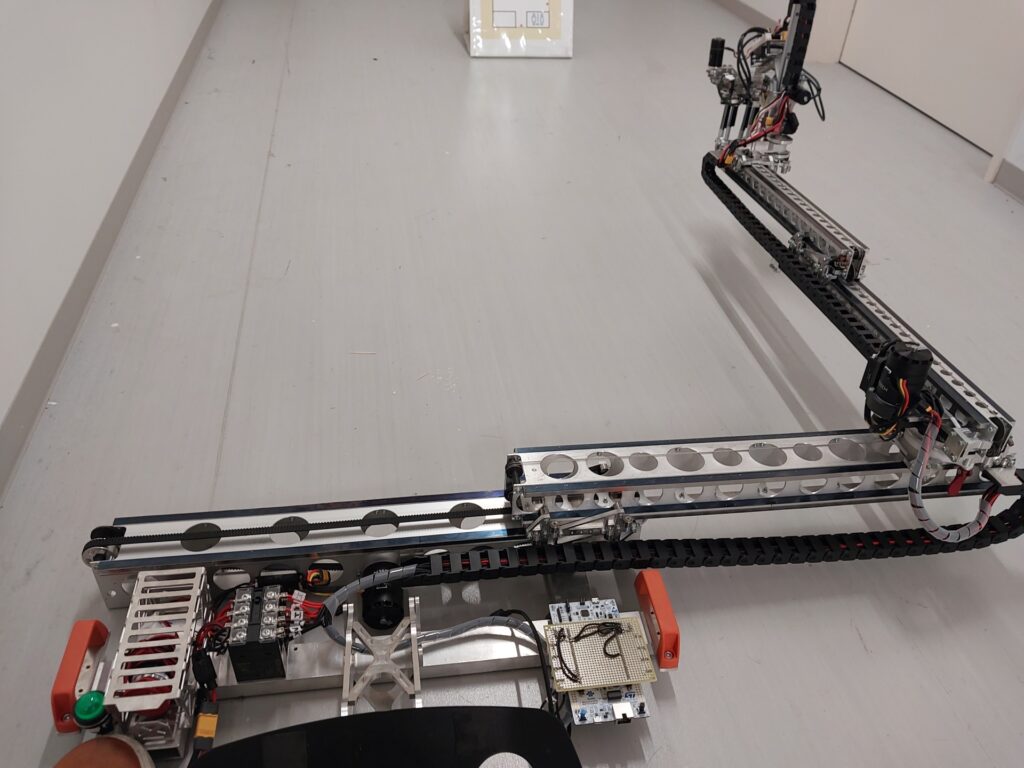
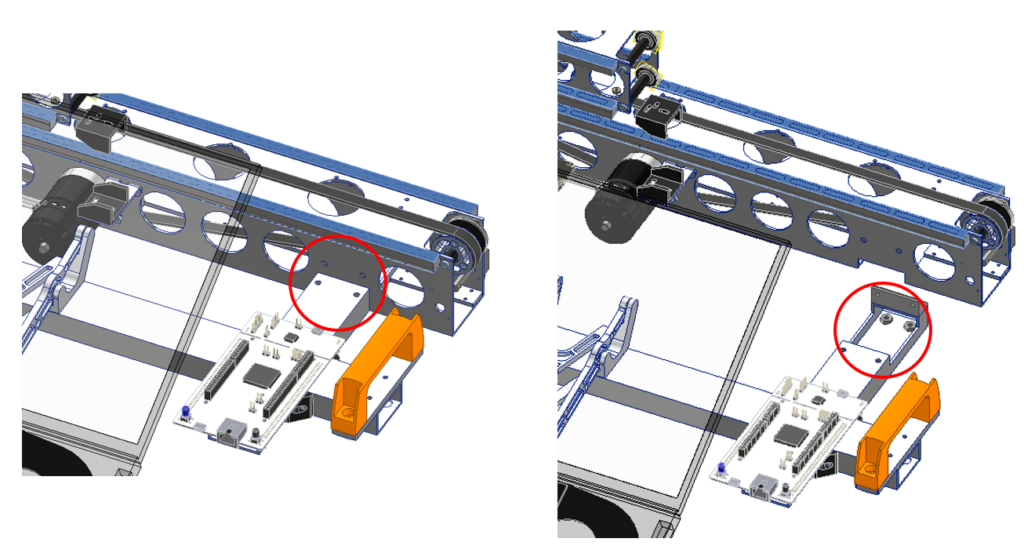
XYテーブルは何も考えずに組むと可動域分の長さのレールが必要になるので、機体がめちゃでかくなっちゃいます。今回はコンパクトさを重視したかったので、X、Y、Z軸ともに多段にして、伸びる構造にしています。ただこの構造、片持ち祭りになるので相当剛性を高く作らないとたわんでしまって使い物になりません。
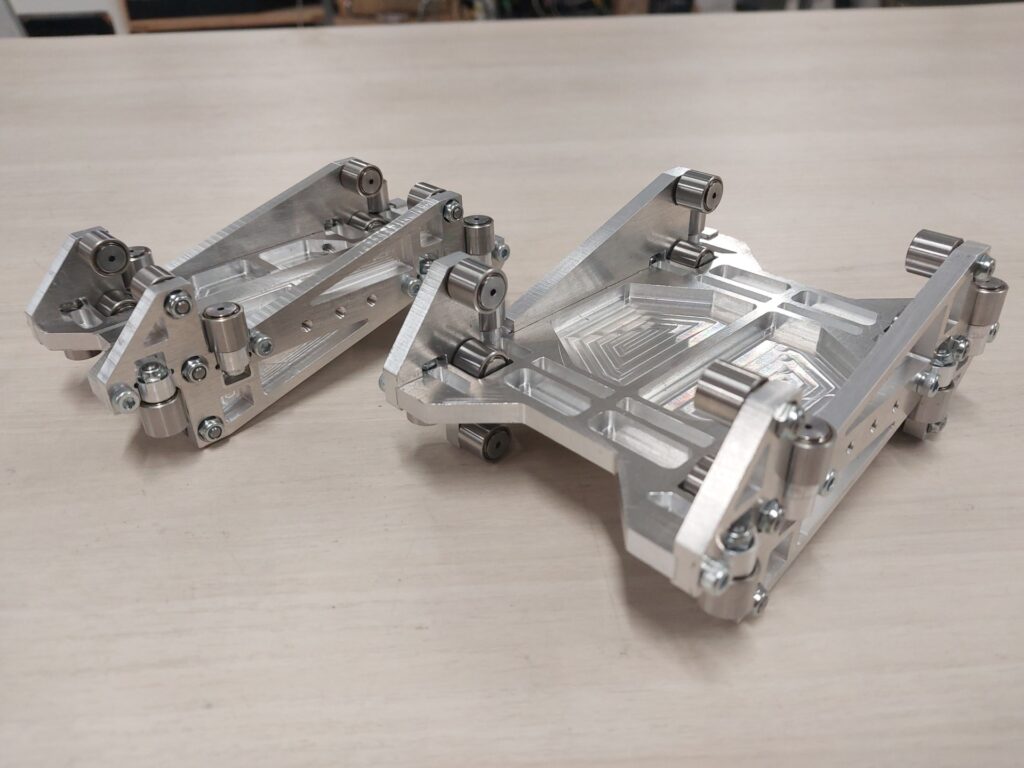
今回は、与圧モリモリ剛性マシマシの自作直動案内を作り、それをワイヤとタイミングベルトを使って両方向に伸展しつつ動かす、ということをしています。

テレスコになってて1方向に伸びる機構は割とありますが、両方向に伸展できる機構は目新しいんじゃないでしょうか?なかなかの面白機構ができた自信アリです。
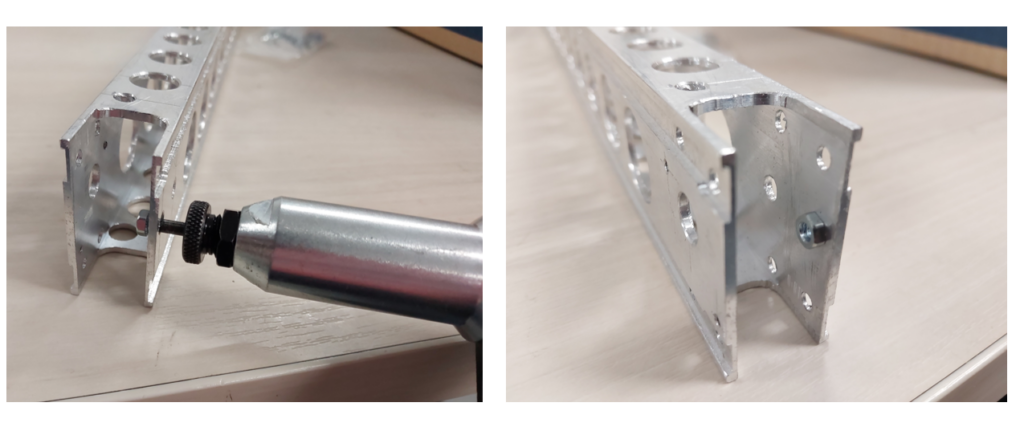
カムフォロワと同程度の硬度である焼き入れリボンをレール側に張り付けることで、ベアリングとアルミ角パイプを使った直動ユニットにありがちな「初めはいい感じだけどだんだんアルミ側が削れてきてガタガタになる」という問題を解決しています。アルミより塑性変形しにくいので与圧をかけやすいのもGood。
そしてなんと~~~!!
ぐるっと回すことで赤青フィールドへの対応ができます!
さらに、X,Y軸を平行にすることで分解せずとも超コンパクトに収納もできます!
こちらも詳細は別記事にて解説予定です!
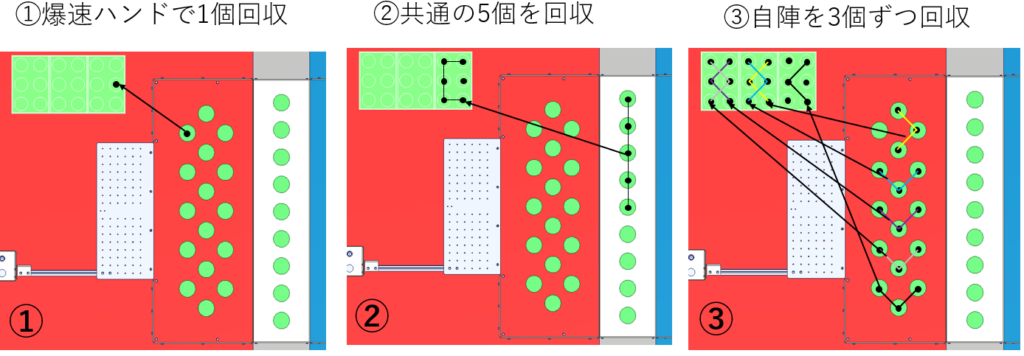
幻の爆速ハンド
ワーク1個を2秒くらいでピック&プレイスする、爆速ハンドも実は作ってました。スケジュールがあまりにもギリギリで、本番には間に合いませんでしたが。。。一徹足りんかった。
こだわりポイント&写真ギャラリー
ちょっと高かったんだけどハンドルはオレンジ色にしてます。オレンジいいよね。
フライスで半分削り飛ばした角パイプを組木みたいに嵌め込むことで、軽量でありながら面で圧を受ける構造にして強度・剛性をUPさせてます。


(この後徹夜明け東京-京都新幹線立ち乗りで地獄を見ます)
スケジュール
機体が完成したのは本番1週間前です()。ただ、制御を担当してくれてたメンバーがめちゃしっかり準備してくれていたおかげで、組立って即日に試合ができるだけの動作ができる状態まで持っていけました!!さすが!!!
ざっくりと、5月チーム結成、7月エンドエフェクタ完成、9月頭XYテーブル完成、その後統合といった流れです。最後の方は設計しながら加工して組立する人になってました。おれはインタプリタ型エンジニアだぜ!
かかったお金
旅費を除いて10万円を見込んでましたが、大体想定通りになりました。ロ技研のおかげでアルミ材は使い放題なので(みんな入ろう!)、モーター代が負担の6割強を占めてます。ありものの部品を結構使ったのが効いてそう。大会で8万円(参加賞3万円+特別賞5万円)を勝ち取りましたがやっぱり赤字ですね。優勝したかったぜ。
おわり
みなさん、M2でもロボコンはできます。やりましょう!
キャチロボ論文執筆MFT魔改造の〆切り四重点が発生してそれはまあ大変なことになりましたが、何も命までは取られません。社会人になると学生の時と比べて参加できるロボット競技会はぐっと減ってしまうので、出られるときに出ておくのが吉です。やりたくなってもやれなくなっちゃいますからね。
できるうちに、楽しいロボコンライフを!ではまた、機構詳細の解説記事で!