みなさんこんにちは、2018年度入学、M2のたくぽんです。
先日第13回キャチロボバトルコンテストが終わりましたが、今回は第12回大会の記事です。
去年のアドベントカレンダーで書くはずだった機体の解説を書いていきますよ。
他のキャチロボ関連記事も見てね!
大会参加報告
直動回転差動機構の紹介記事
電装の紹介記事
改めて試合の様子をご覧ください(青チームです)
いい感じにじゃがりこを回収してますね。
試合開始直後に小さいロボットがじゃがりこを一個回収したあと、でかいロボットが残りのじゃがりこを回収してるのが分かるかと思います。
今回は、でかいロボットの手先、じゃがりこを掴んでる部分である「エンドエフェクタ」と、試合開始後3秒でじゃがりこを1つ回収している小さいロボット「爆速ハンド」について紹介します!
エンドエフェクタ
こんなのを作りました。
吸盤が付いていて、変形してその配置が変わるようになっています。
機構を思いつくまで
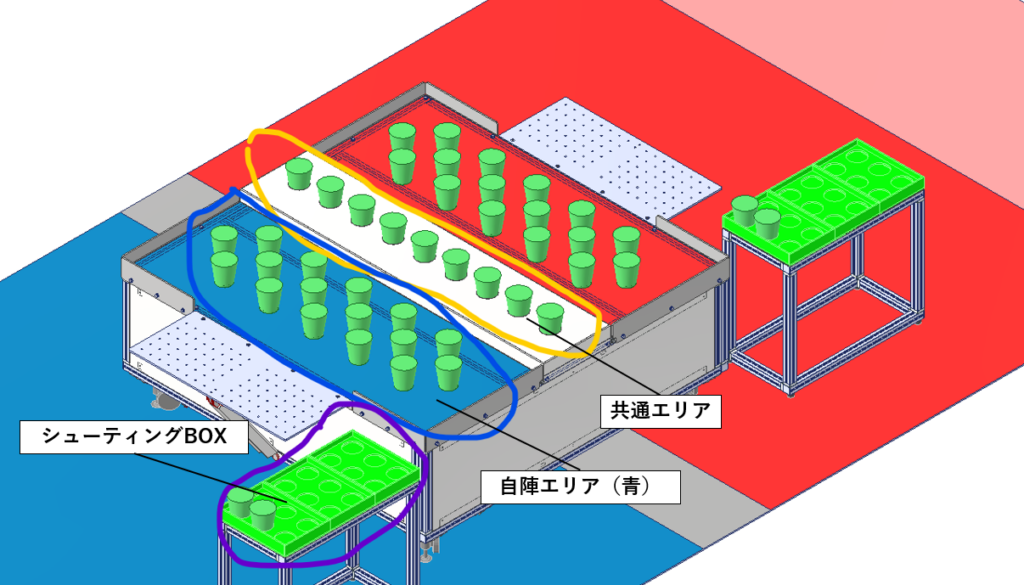
今回のキャチロボでは,↓のように並んだじゃがりこをシューティングBOXに入れるという課題でした.
相手よりもたくさんのじゃがりこを確保できれば、それだけ勝利に近づきます。
ということで、「共通エリアの過半数、5個のじゃがりこを相手よりも早く確保できること」を設計目標に定めました。
早く確保するためには数個ずつちまちま回収するのではダメだろうということで、「共通エリアの5個は同時に回収する」ことにしました。
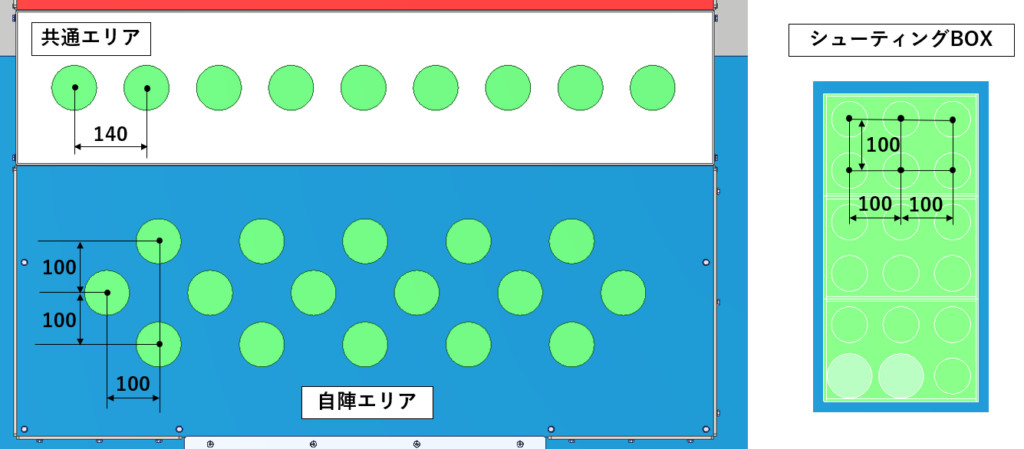
ここで問題になるのが、じゃがりこの配置です。自陣は1個並んでいる列・2個並んでいる列が100mm間隔で交互に並んでいますが、共通エリアは140mm間隔で1列に並んでいます。加えて、プレイス先のシューティングBOXは100mm間隔の格子型です。
 じゃがりこの配置
じゃがりこの配置
それぞれ配置が違うので、自陣回収 ⇔ シューティングBOXにプレイス、共通回収 ⇔ シューティングBOXにプレイス、というふたつの場合を考えないといけません。
それぞれに専用のハンドを作るのはスマートじゃないですし、ロボット内でじゃがりこを並び替えるのも大変そうです。
自陣・共通・シューティングBOX、3つそれぞれが違う並びなのが難しいポイント。
どうしようかな~~~
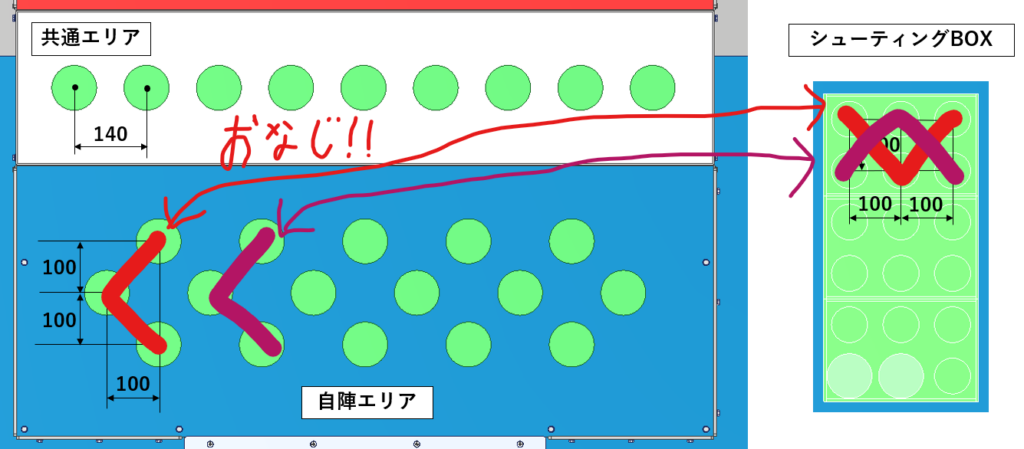
おや?自陣とシューティングボックスの配置、これは…??
 天啓 𝒉𝒂𝒔 𝒄𝒐𝒎𝒆 …
天啓 𝒉𝒂𝒔 𝒄𝒐𝒎𝒆 …
「く」の字型の並びが、自陣とシューティングBOXで共通してる!!!
おなじ並びなので、「く」の字型配置のハンドなら、自陣とシューティングBOXの両方で使いまわせます。この気づきで、「く」の字型配置のハンドを使うことによって、自陣回収 ⇔ シューティングBOXにプレイス の際のじゃがりこ並び替え工程が不要になりました!
これで、自陣・共通・シューティングBOXの3つの並びに対応する問題から、「共通エリアの140mm間隔の1列」と「自陣・シューティングBOXの『く』の字」の2つの並びに対応するハンドの開発という問題に落とし込め、問題が簡単になりました。
機構の設計
じゃがりこの回収方法については、吸盤を用いた吸引を採用することにしました。じゃがりこの天面にさえアクセスできれば回収できるので、パカパカ開閉するハンドに比べて干渉問題が起きにくそうです。
ということで、
・共通エリアの5つのじゃがりこを同時に回収できて
・それを「く」の字型配置を含むシューティングBOXの並びに変更できる
・吸盤をじゃがりこ天面にあてがうことで回収を行うハンド
を設計すればよさそうです。
こんな感じの、マジックハンドを変形させたようなリンク機構を使えばうまくいきそう。
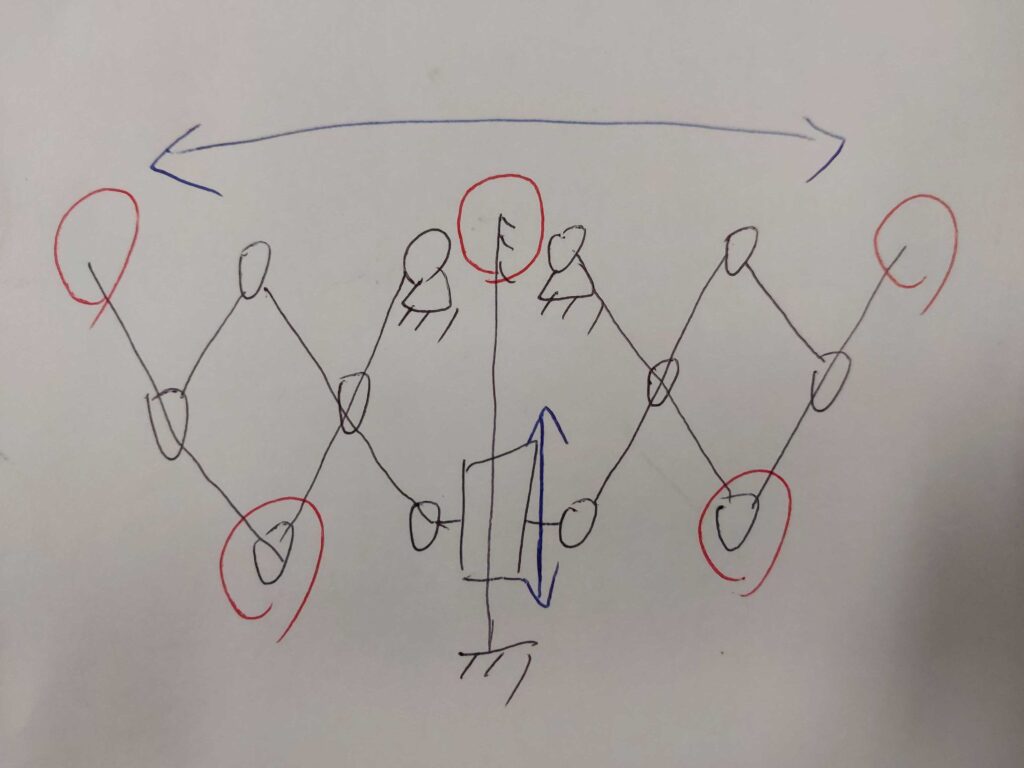 メモ書きで汚いですが、赤色が吸盤です。中央の直動対偶(にくっついてる回転対偶)を動かすと、鳥が羽を広げるような動きでリンク機構が開閉します。
メモ書きで汚いですが、赤色が吸盤です。中央の直動対偶(にくっついてる回転対偶)を動かすと、鳥が羽を広げるような動きでリンク機構が開閉します。
共通エリアモード、自陣・シューティングBOXモードの2値を取れればよいので、モーターは使わずにエアシリンダで駆動することにします。
機構のコンセプトが立ったので、リンク比をいい感じにしていきますよ。
フンッ
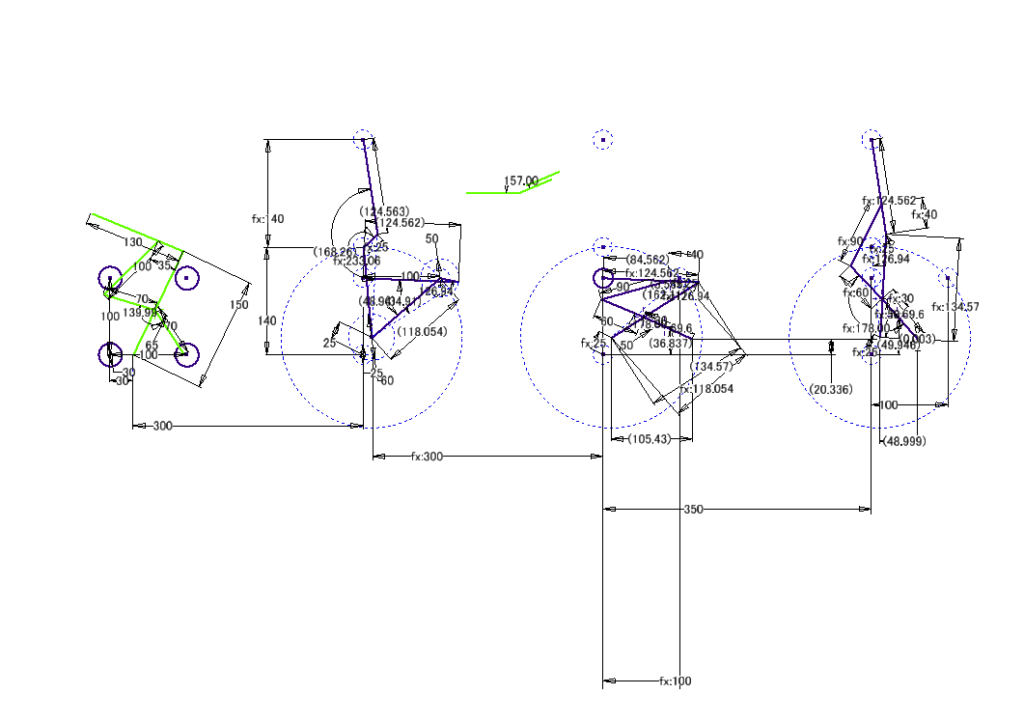 👈最初のスケッチ 最終的なリンク比👉
👈最初のスケッチ 最終的なリンク比👉
2時間CADのスケッチを凝視してたらいつのまにか最高のリンク比が目の前に…!!
各吸盤の目標位置との偏差は0.5mm以内に収まってます💪
リンク比が決まったのでもりもりモデリングして完成!
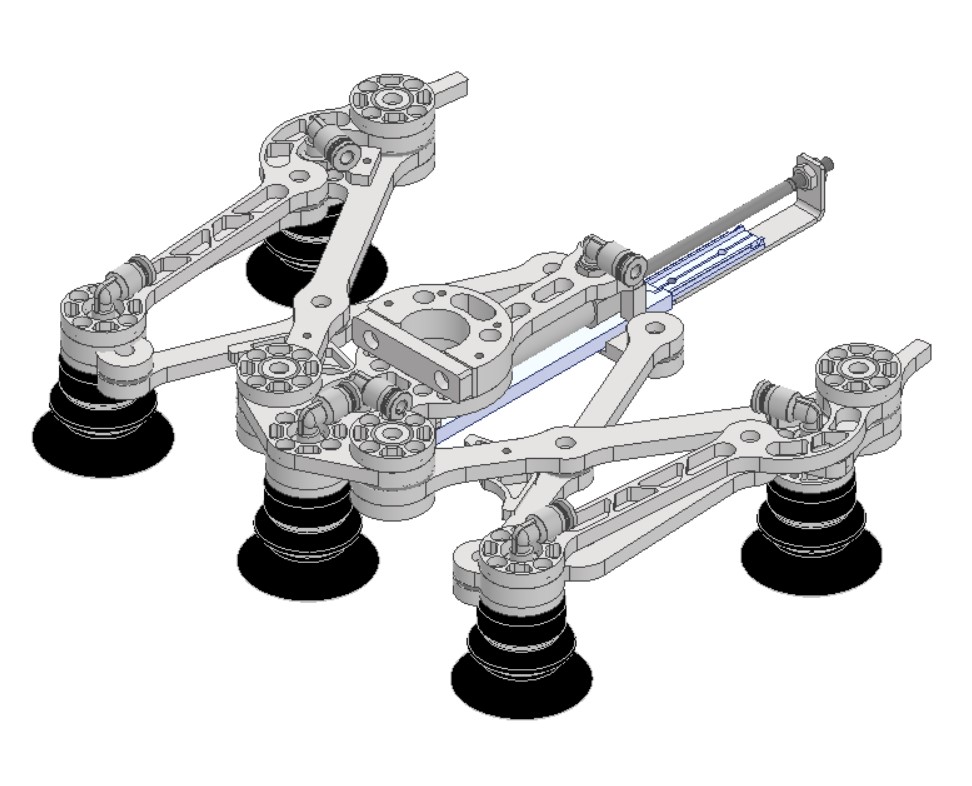 手先なのでがっつり肉抜きしてます
手先なのでがっつり肉抜きしてます
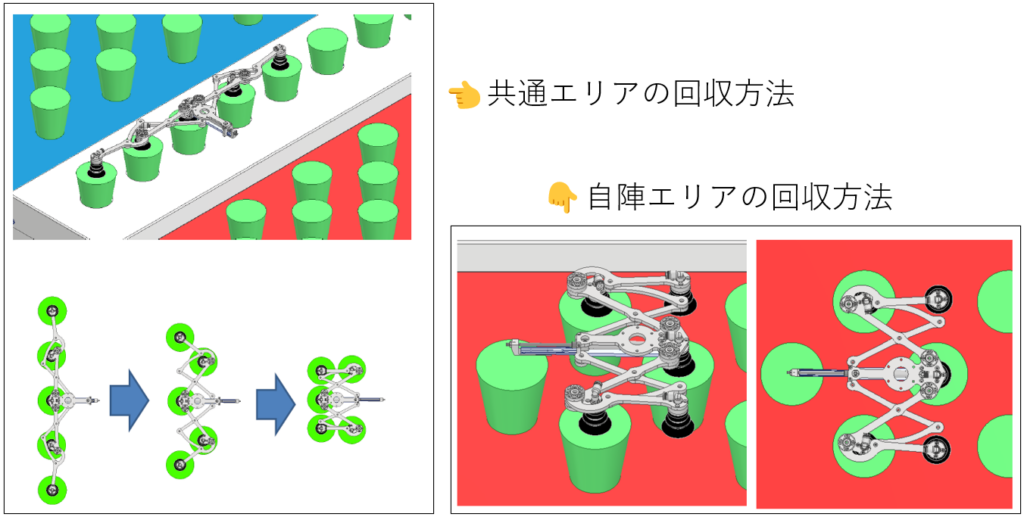 各エリアの回収方法
各エリアの回収方法
共通エリア回収後の変形動作が最高だからみんな見てくれ
爆速ハンド
「共通エリアに進入するには自陣のワークを1個以上シューティングBOXにプレイスしないといけない」というルールがあります。爆速でプレイスを終え、相手よりも早く共通エリアのじゃがりこをせしめてやろうということで、1個のワークを爆速でピック&プレイスする、爆速ハンドが生まれました。
試合開始後この爆速ハンドで1個プレイスし、シューティングBOXの空いた部分に共通エリアの5個をプレイスすることでシューティングBOXを1つ埋めます。今でもこのコンセプトはどこよりも良かったんじゃないかな~と思ってます。
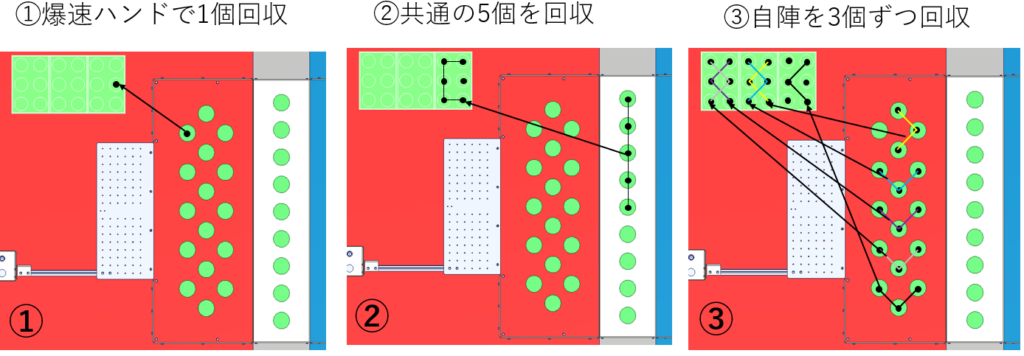 最高のコンセプト
最高のコンセプト
できたやつ
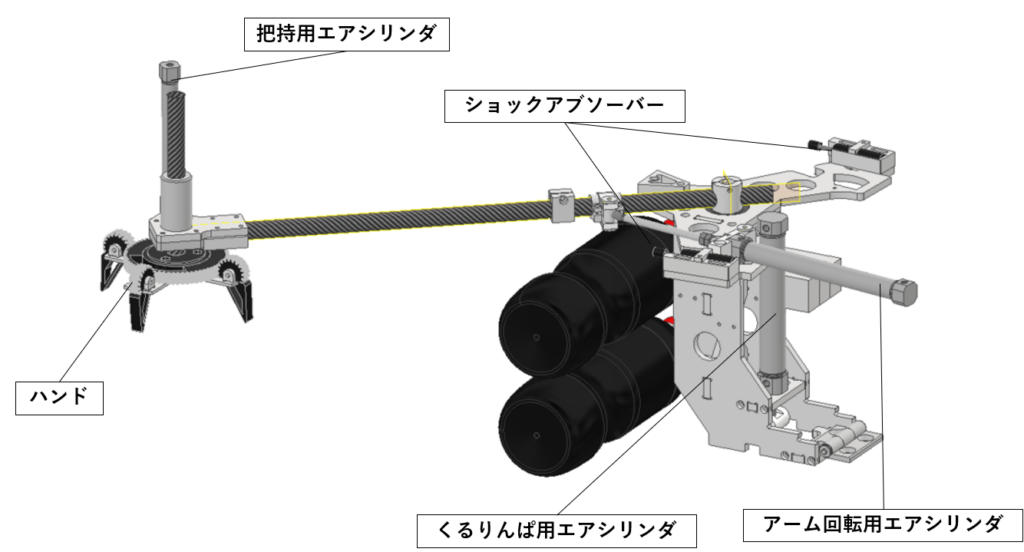 これが「爆速ハンド」だ!
これが「爆速ハンド」だ!
がっしゃんがっしゃん派手に動いとりますね。
ピック&プレイスを終えた後は、メイン機体の邪魔になるのでフィールドの裏に引っ込んでもらってます。くるりんぱ。
この機構,完成したのが大会数日前だったので、いろんなところがはちゃめちゃな仕上がりになっちゃいましたが、とりあえず動いてよかったです。
本番では爆速ハンドで回収したオブジェクトは破損判定もらっちゃったんだけどね…
ハンドのしくみ
高速で動くアームの先端にハンドが付くので、軽量化のためにできるだけ把持にアクチュエータを割きたくない。1度だけ把持できればよいので、ねじ歯車とツメを使ったパッシブな機構を考えました。ほぼほぼ3D🍮製の機構で、割と軽いです。
ハンドをじゃがりこに押し当てると、ツメに引っかかって把持ができます。ソレノイドを駆動することでロックが外れ、ツメが開いてプレイスできます。おもしろ機構をつくれたのは楽しかったけど、動きが渋かったのが改善ポイント(大会本番はシリコンスプレーを塗りこんで事なきを得ました)。
次は2023年のキャチロボの記事を書きます!
ずっと放置してたキャチロボ2022の記事をようやっと書きました。次はキャチロボ2023の機体紹介記事を書きます!工大祭で展示するので、それまでに書けたらいいな…(工大祭は明後日!)
ではまた!