みなさんこんばんは。ゆきです。
製の6時間はいかがお過ごしでしょうか。
私はロボットちゃんとぬいぐるみちゃんと一緒に自宅デート中です。
(⋈◍>◡<◍)。✧♡ < 黙ってコードを書け ]
さてこのたびは、2018/12/22~23に開催されました、「東北地区ロボコン交流会2018」というイベントに参加させていただきました。
こちらご報告して参りたいと思います。
この記事は rogy Advent Calendar 2018 の24日目の記事です
東京工業大学の公認サークル「ロボット技術研究会」のブログです。 当サークルの日々の活動の様子を皆さんにお伝えしていきます。たくさんの人に気軽に読んでもらえると嬉しいです。
みなさんこんばんは。ゆきです。
製の6時間はいかがお過ごしでしょうか。
私はロボットちゃんとぬいぐるみちゃんと一緒に自宅デート中です。
(⋈◍>◡<◍)。✧♡ < 黙ってコードを書け ]
さてこのたびは、2018/12/22~23に開催されました、「東北地区ロボコン交流会2018」というイベントに参加させていただきました。
こちらご報告して参りたいと思います。
この記事は rogy Advent Calendar 2018 の24日目の記事です
こんにちは。Maquinistaで広報を担当している16のMassaです。
こちらはrogy Advent Calendar 2018の23日目の記事になります。
Maquinistaでは来年5月26日に開催されるNHK学生ロボコン2019に向けて日々活動しています。特に現在は1次ビデオ審査を目前に控えているため、練習や調整を行っています。
“Maquinistaの2018年を振り返る” の続きを読む
こんにちは。18のHitomosiです。この記事は [rogy Advent Calendar 2018]の20日目の記事です。
マウスとかキーボードが作れるってよくないですか?PCに接続するだけで動くだけでも正直面白いんですが、作ったものでPCが操作できます!
マウスとかキーボードを作るといっても、今回はいわゆるそういうものを作るというわけではなくて、USBでPCに接続するとマウスやらキーボードとして使える何かみたいなものを作ります。要するにHIDデバイスを作るわけですね。ヒューマンインタフェースデバイスデバイス。
今回はボタン入力のものを作っていきますが、様々なセンサーの値を反映させるみたいなこともできるので、いろいろ応用が利くかと思います。
この記事はrogy Advent Calendar 201819日目です。
みなさんこんばんは,17年度入学のおがたです。翌日提出の実験レポに追われていたら投稿日当日の23時半でした。
さて、rogyを構成しているメンバーは大多数が4類と5類、制御や機械、電電をはじめとした工学系の人たちですが、一部理学系の人たちも所属しています。僕も1類出身の物理学系所属、つまるところ理学の人間です。工学やりたい(切実)
ということで今回は僕が物理学系がどのようなところなのかざっくりと紹介していきたいと思います。 “物理のすヽめ” の続きを読む
はじめまして、16のあおのりです。
この記事は、rogy Advent Calendar 2018の18日目の記事です。
(ごめんなさい、間に合いませんでした…)
皆さんは、自動車の運転はされるでしょうか。
私は実家通いなので、実家の車を利用してちょくちょく出かけています。
その自動車ですが、ボンネットを開ければその中にはエンジンだけでなく、
多くのセンサが搭載されていることはご存知でしょうか。
ただアクセルを踏んで加速するにも、様々なセンサの情報を得て、エンジンを制御しているというわけです。
その他、運転に必要な情報を提供する速度計や回転数計、距離計に水温計…とそれらを表示するために自動車の内部では様々なセンシングを行っています。
これらを利用して電子工作をしてみようと思い、距離計を作ってみました。
自動車の距離計は、トランスミッション等から発生する回転信号を取得し、その信号のパルス数を計数することで距離を算出しています。
普通、1km走行毎に637*n(nは自然数)回パルスが発生するようになっているらしく、これまで調べた限りだと、ト〇タやホ〇ダ、〇菱の乗用車はn=4の車両が多いようです。
自動車は時速60kmで分速1km、これを基準に考えれば大体40Hzのパルス波が出ていることになります。
パルス波の振幅などは整備解説書が手に入れば載っているのですが、今回の製作対象車の情報は手に入らなかったので、20km/h、30km/h、40km/h時の車速パルスを観測しました。
ECUからメータに伸びる配線から取得が可能です。
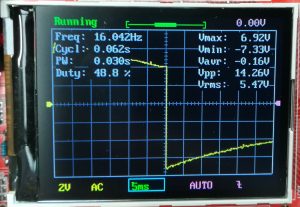
20km/h時の車速パルス
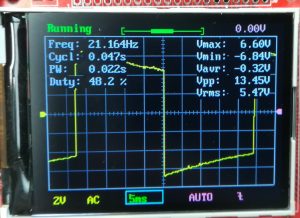
30km/h時の車速パルス
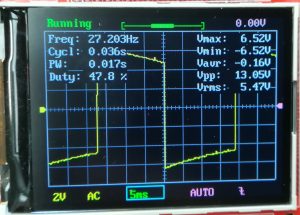
40km/h時の車速パルス
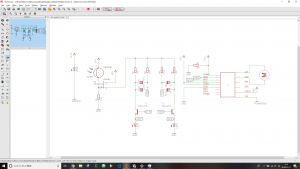
あとは、1パルス毎に車が進む距離を大体見積もって、プログラムします。
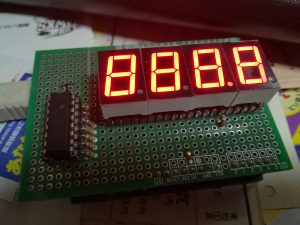
こちらはテスト用に作った回路です。
7セグで4桁表示。実際の自動車が0.1km単位なので、0.01km単位まで表示できるように設定しました。
あとはキロポストがあって直線が長い道路で調整して製作完了です。
最終的には東名高速でキロポスト基準40km走行時に誤差0.1kmのところまで調整できました。
これ自体は大した作業では無いのですが、運転しながら計測や調整するのは不可能なので、2人で行いました。
とまあ、自動車を利用した電子工作は対象が自動車なので、計測やテストが少々面倒なところがありますが、
目に見えていない情報を可視化することも出来るので楽しいと思います。
(スロットルの開き具合、エンジン油温など)
最後に、自動車の電気配線を誤って接続すると、正常な運転ができなくなり、エンジンが始動しなくなるなどの問題を起こす場合があるため、十分に気を付けて行うようにしてください。
では。

上手くいったので電池含め一枚の基板にまとめました。
初めまして、17のバンル( @17_bnr )です。
この記事はrogy Advent Calendar 2018の17日目になってます。
さて、みなさんロリは好きですか? 僕は好きです。
ロリとはもちろんエレクトロニクスとエレクトリシティを勉強・研究するところ、つまり工学院電気電子系です!!
電気電子系では主に5分野について研究しています。
このページを見てもらうと5分野が詳細にわかると思いますが、ざっくりいうと
回路:いろんな素子を使っていろんなものを作る研究
波動・光および通信:電磁波の利用の仕方を研究
デバイス:新しい電子部品の研究
材料・物性:新しい物性を持つ材料の開発、利用の研究
電力・エネルギー:電気エネルギーとほかのエネルギーの変換を研究
ということで、
可視光で抵抗値が変わる材料を用いた可視光通信による、スイッチング電子デバイスより電力機器を動かす回路を作りました。
回路図です。
動作の流れとしては4.5Vで流れるLEDが光るとフォトICの抵抗が下がるので、R1にかかる電圧が上がるので、FETのゲートがONになります。
そうすると無安定バイブレーターが作動し、電流が交互にAIN1とAIN2に入ります。
最後に、モータードライバーに信号が入り、モーターが動きます。
ということで動かした動画です。
容量の関係で短い動画しかアップロードできませんでしたが長めの動画はツイッターにあげたいと思います。
そろそろ系所属が始まると思うのでぜひロリ系へ
こんにちは16のマッキーです。
この記事はrogy Advent Calendar 2018の15日の記事です。
タイトルの通りですが、AdC(Advent Calendar)ということでADC(Analog Digital Converter)を作ってみました。
ADCはマイコンとかを使う人はおなじみの機能だったりすると思うのですが、それを使うのではなく自分で作ろうといったところです。
そんな感じで作ったものを紹介します。
ADCの概要についてはここ → https://www.rohm.co.jp/electronics-basics/ad-converters/ad_what1 などを見ると以下の説明もだいたいわかると思います。
今回はフラッシュ型と逐次比較型のADCを作りました。とりあえず動作すればいいかなということで性能は特に気にして作ってませんが、最終的にAD変換したものをLEDにレベルメーターのように出力できればいいかなと思ったのでどちらも5bitのADCにしました。
なんかできた pic.twitter.com/ecWNlNqKyp
— マッキー (@mmaakkyyii) 2018年12月3日
回路自体もコンパレータを大量に並べただけなのでシンプルでいい感じですね。
とりあえずこんな感じになった
逐次比較型のADC的なもの pic.twitter.com/KIAHyFCoEx— マッキー (@mmaakkyyii) 2018年12月15日
本当はサンプルホールド回路が入るのですが、時間が足りなかったのでついてません。ただ人がLEDのメーターを見る分には問題なさそうです。(動画は1Hzの三角波)
二分探索 pic.twitter.com/94hi7kIkGI
— マッキー (@mmaakkyyii) 2018年12月15日
二分探索してる様子です。青い信号(DACの出力)が少しずつ黄色い入力電圧に近づいてます。
比較部分のロジックはFPGAを使いました。
またそのためのHDLのコードをMATLABのHDL Coderというツールを使ってみました。このため、コードは書かずにブロックをごちゃごちゃいじってHDLを生成できました。
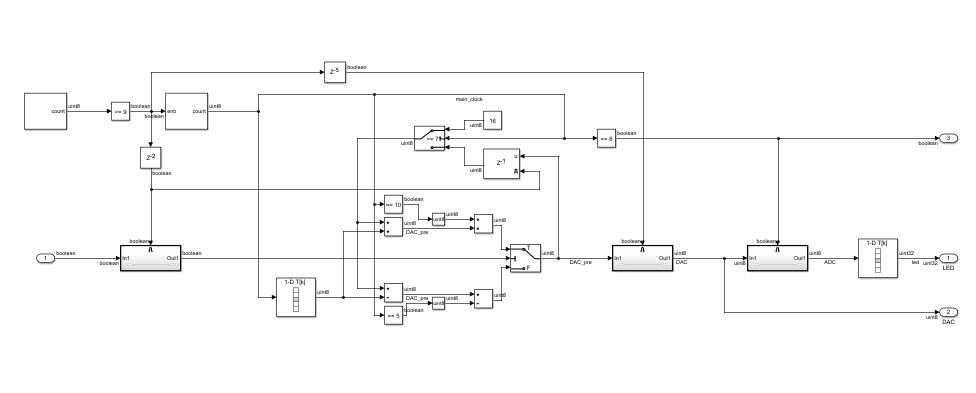
↑Simulink上の回路の雰囲気
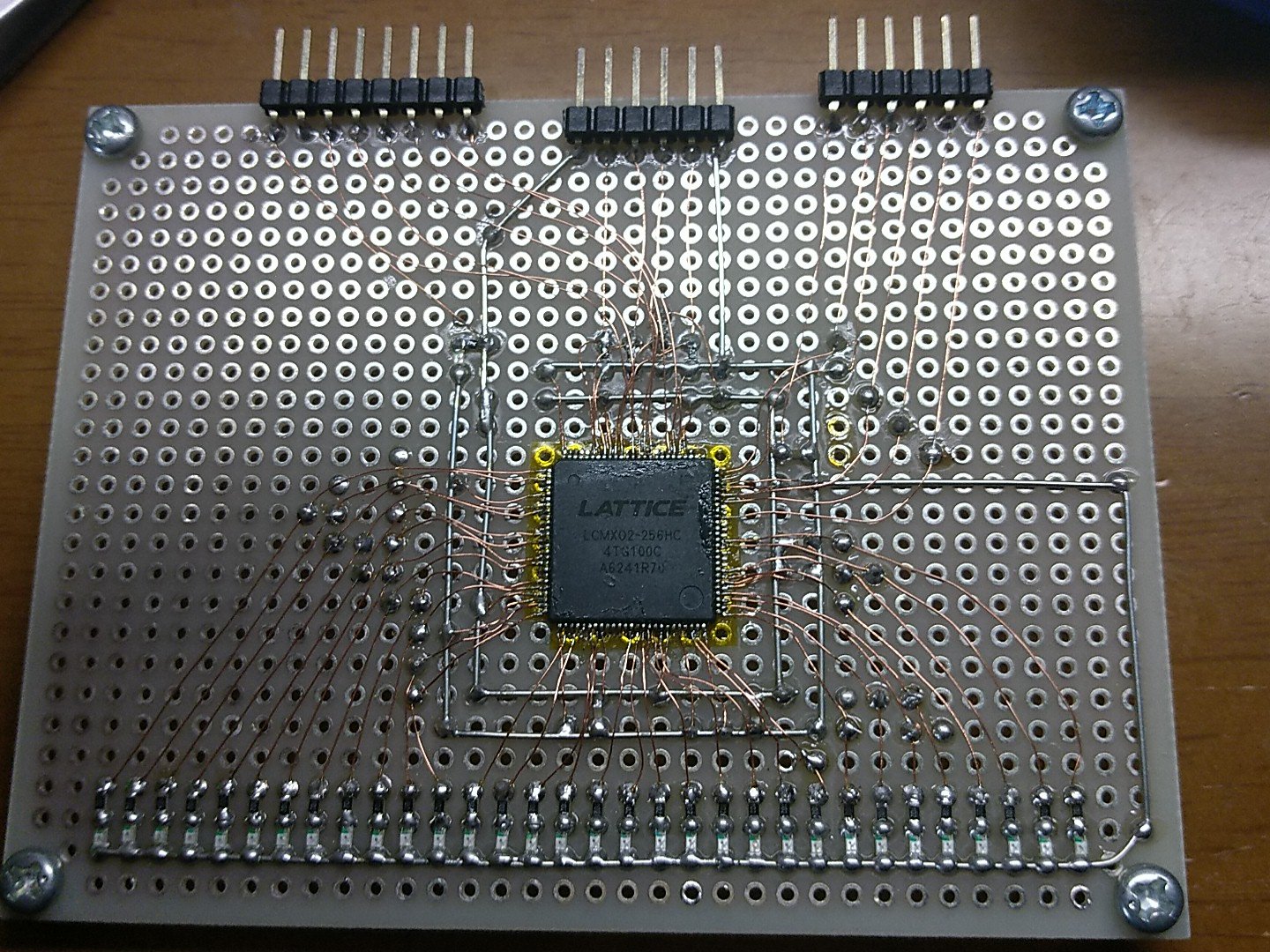
FPAG周りの回路はユニバーサル基板上に作りました。(こんな感じの配線は初めてやったけど意外とできることが分かった)
この記事はrogy Advent Calendar 2018 13日目の記事です.
こんちゃーっす
修論の進捗が厳しいおにぎりです.
とりあえず修論から現実逃避して,楽しくものつくりしながらブログ書いてます.
さて今回は,一昨年の非円形歯車,去年の双葉車に続いて特殊歯車シリーズ第3弾です.
もしお時間があればそちらもどうぞ合わせてご覧くださいませ
※注意
ダラダラ書いてしまったので結構長くなってしまいました.
途中に出てくる数式たちについては流し読み推奨です.
言ってしまえば,今まで僕はいわゆる “ただの歯車そのもの” を作って回して遊んでいただけでした.
そこで,歯車自体をおもちゃにするのではなく,特殊歯車を使った,まだ誰も作っていないおもちゃを作りたい.そう思ったわけです.
ということで,モーターを使って最も簡単に作れるおもちゃの1つである,ラジコンカーに焦点をあてます.
普通のラジコンカーではつまらない.そこで,僕の思想は
↓
↓
ハイ.いつもどおり突拍子がないですね.
何はともあれ作ったものがこちらです.
ウィーン pic.twitter.com/pnkQeajhfx
— おにぎり型機関銃@楕円輪ラジコン (@manami1433) October 6, 2018
いかがでしょうか?タイヤが楕円であることを除けば,ほぼ普通のラジコンカーです.
もちろんマイコンは一切使っていませんし,モーターも左右合わせて2個だけです.
察しのいい方は,何やら赤い歯車と青い歯車が重要そうだと睨んでいることと思います.
さて,では具体的にどんな仕組みなんでしょうか?
皆さんこんにちは、会計の優勝です
(完全に内輪ネタです。すみません。)
この記事はrogy Advent Calendar 2018 12日目の記事です。
皆さん、スマートウォッチをご存知でしょうか?
AppleWatchなどが有名だと思いますが、簡単に言うと液晶のついてる時計です。
(スマホから通知を飛ばしたりなど、主にスマホの補助的な役割を担っています)
私は半年前からASUSのZenWatch2というスマートウォッチを使っており、日々重宝しています。
液晶がついているからこその利点としてWatchFace(壁紙)が豊富で、いろいろなアプリが多くの種類のWatchFace(壁紙)を出しています。
ただ、一つ問題点があるとすると、自分の100%好みの壁紙が世の中に存在するわけではないので多少妥協しなければならないことです。
「ないものは作る~ロボット技術研究会~」
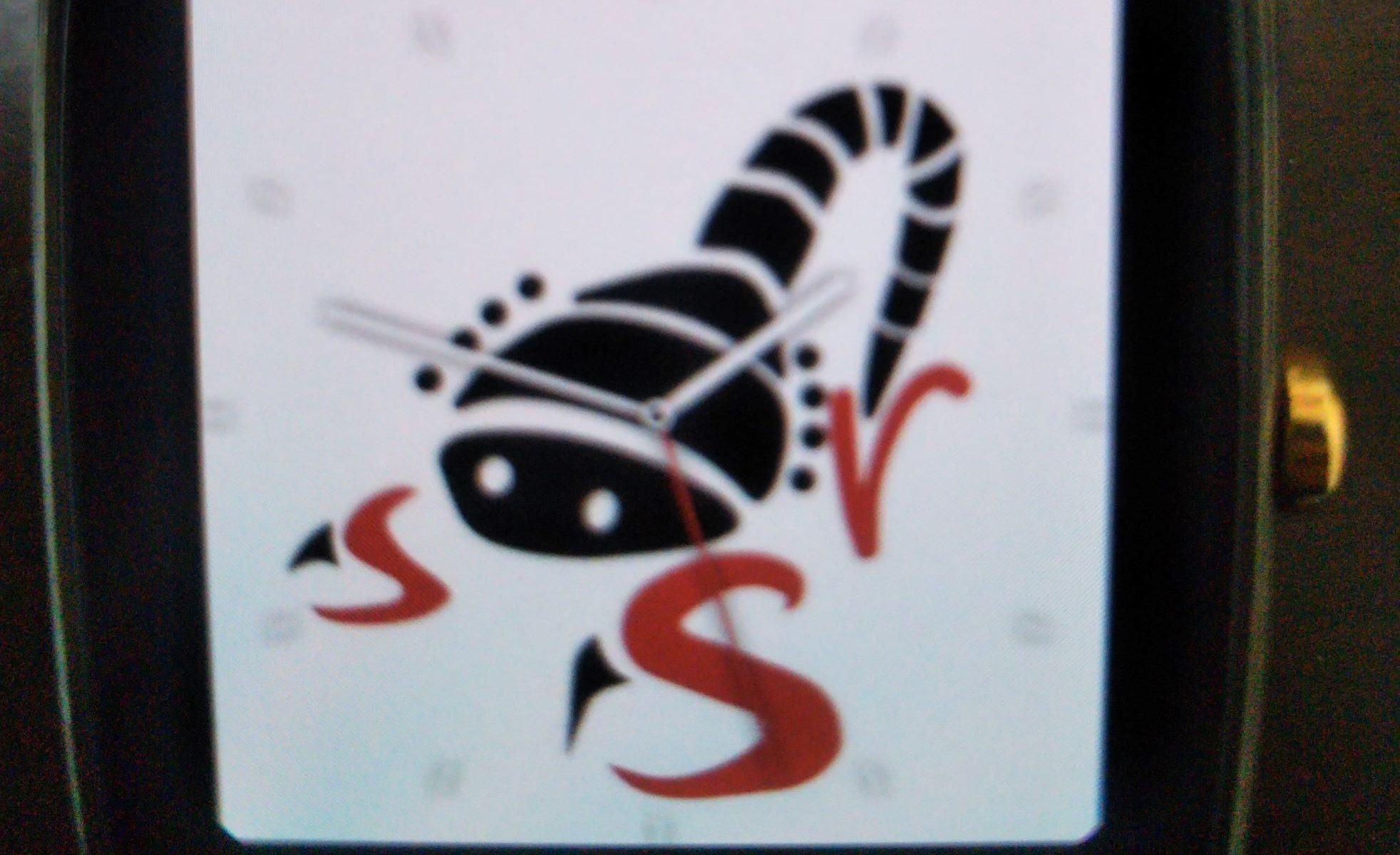
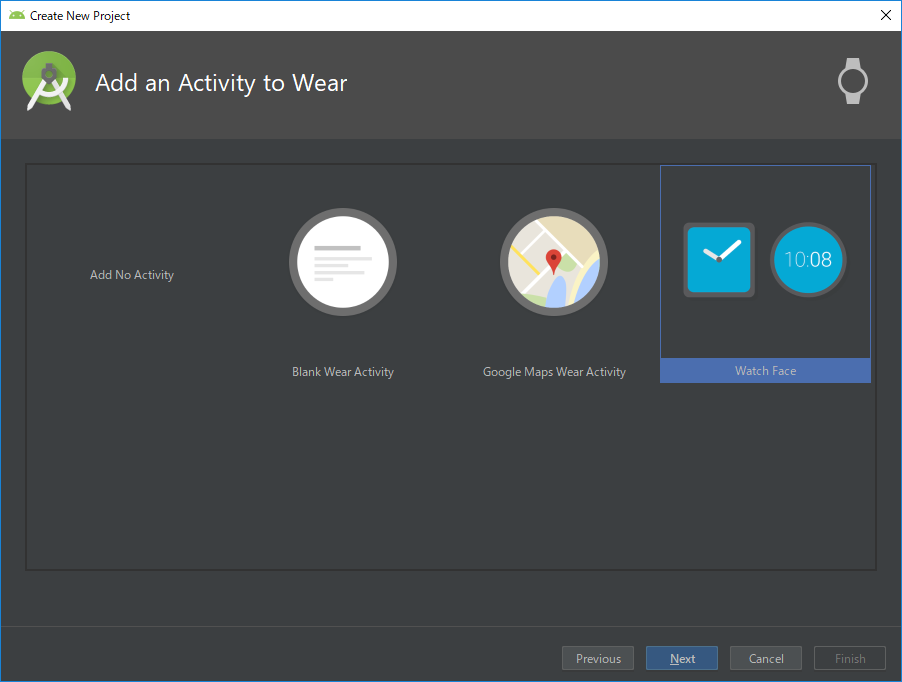
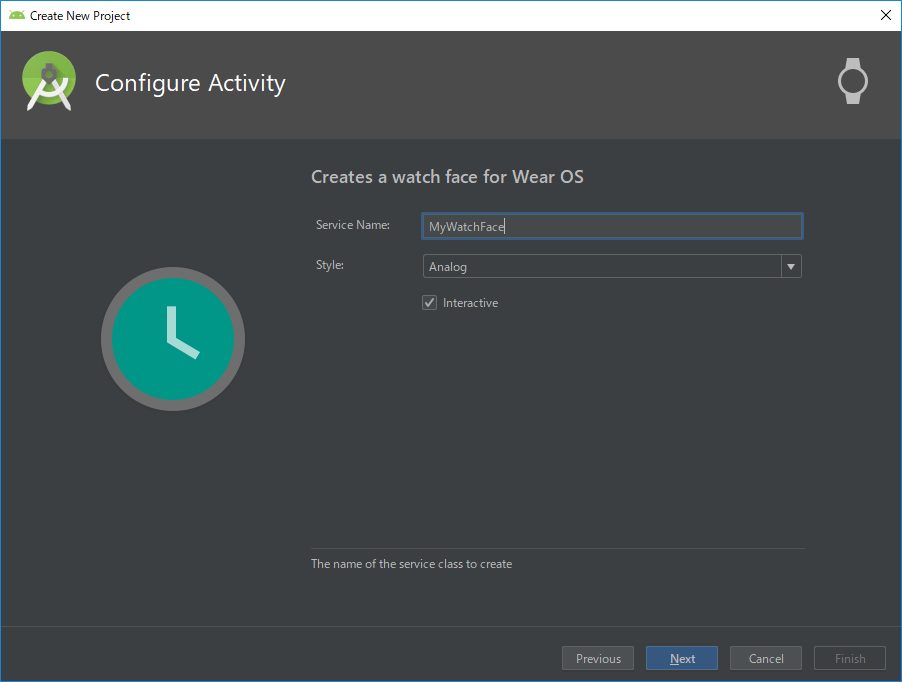
ということで、自分好みのWearFaceをつくってみました。
まず、スマートウォッチの端末情報から。
端末名:ASUSZenWatch2 434B
AndroidWear:2.17.0.217437364
AndroidOS:7.1.1

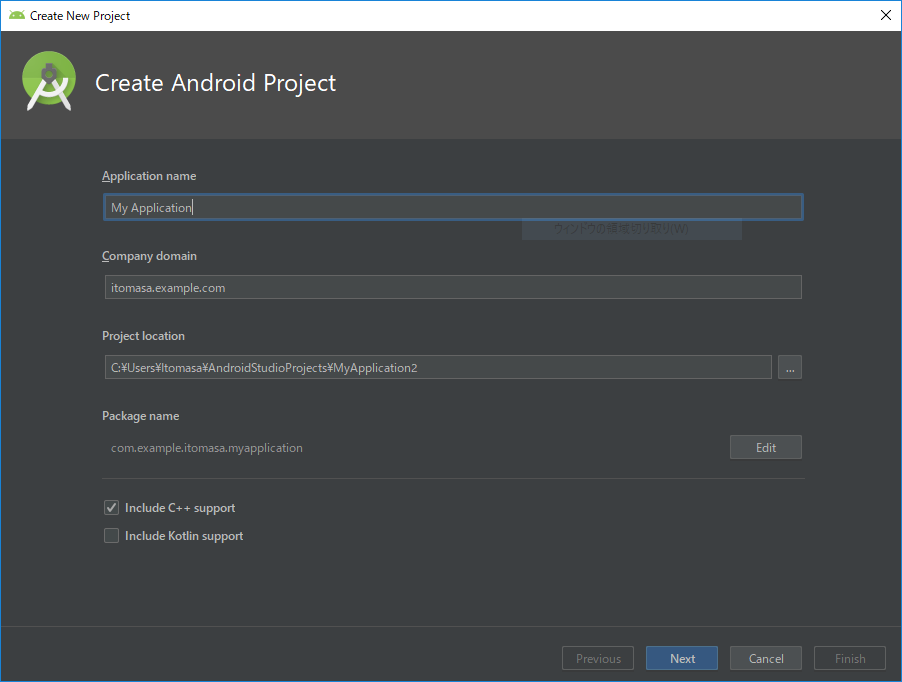
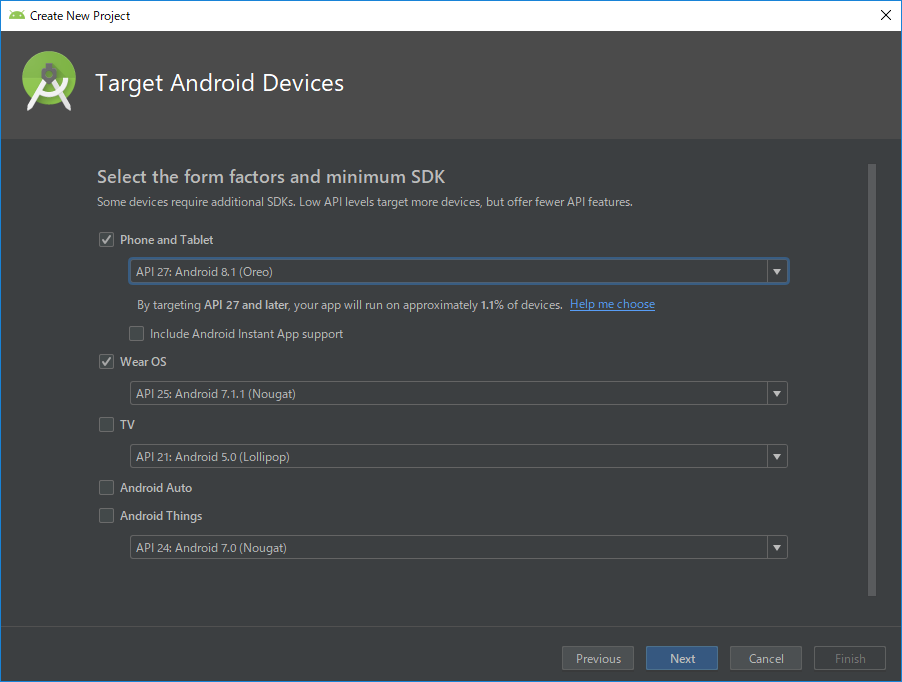
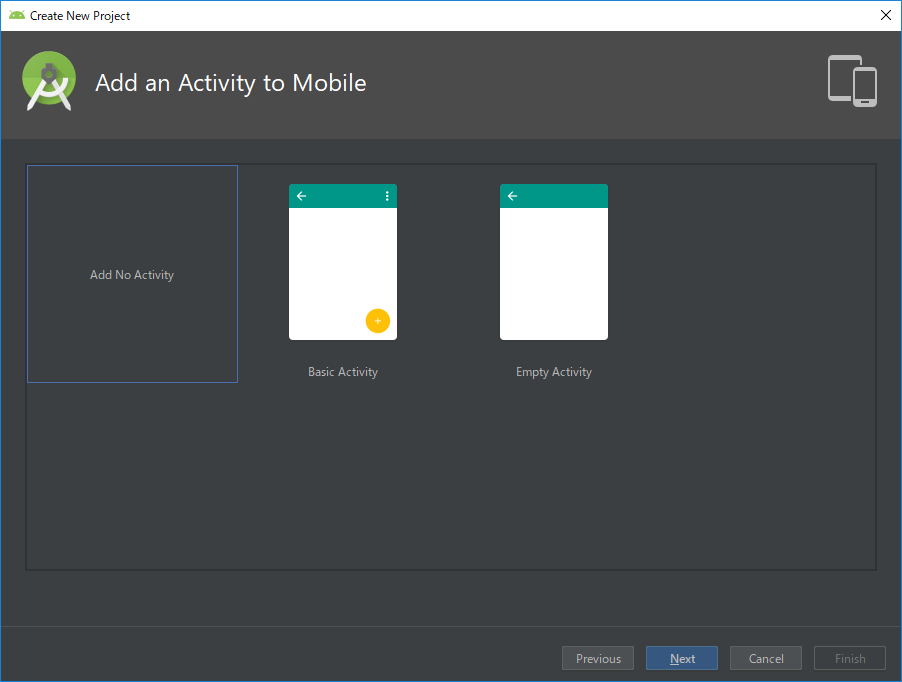
Androidの開発には大きく2つの選択肢(Eclipse・AndroidStudio)がありますが、今回はAndroidStudioを使いました。
> adb forward tcp:4444 localabstruct:/adb-hub > adb connect 127.0.0.1:4444 (切断する際) > adb disconnect 127.0.0.1:4444 > adb kill-server
(ホスト:接続済み ターゲット:接続済み となってることを確認する)
参考サイト:Bluetooth経由でデバッグする



さてやっと本題に入ります
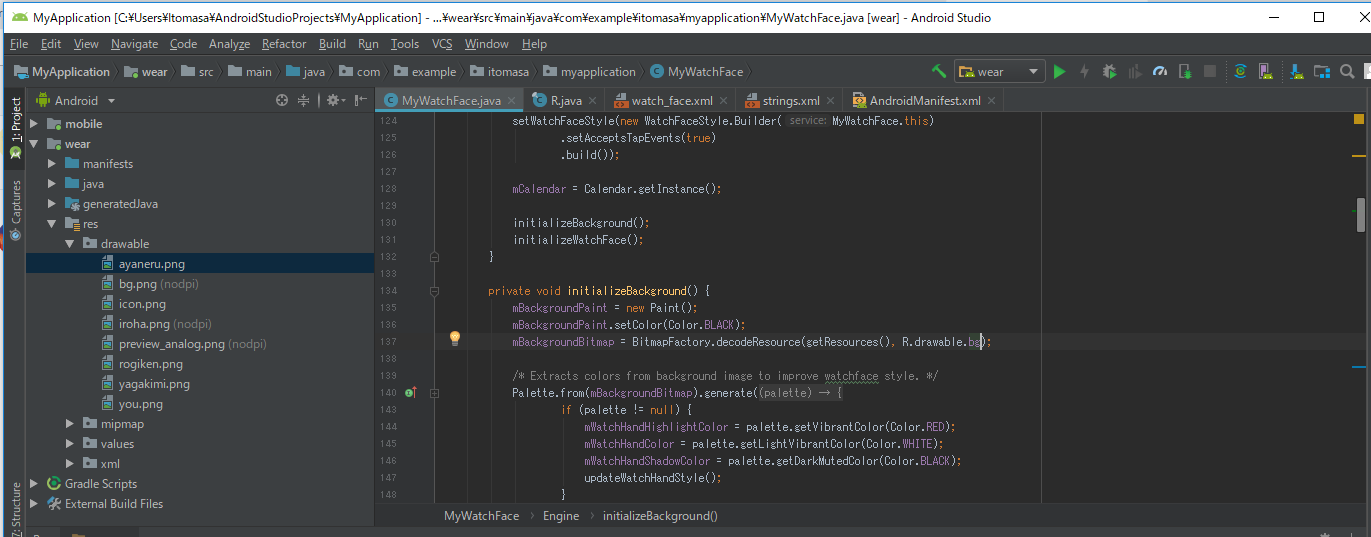
環境構築に意外と戸惑ってしまったので忘れてしまいそうですが、当初の目的は自分の好みの画像でWatchFaceをつくることでした
mBackgroundBitmap = BitmapFactory.decodeResource(getResources(), R.drawable.bg);
の “bg” の 部分を画像ファイルの名前に書き換えればOK




今回はAndroidWearのWatchFaceの壁紙を自分好みのものに変えて、世界に一つだけの時計をつくりました
ほかにも針の形状を変えてみたり、画面をタップした時に処理をしたりなど、たくさんのことができるようになっています
是非皆さんも試してみてください!!!
こんにちは.たのしいロボット帝国のARGです.
今日は傘の盗難防止のお話をします.
この記事はrogy Advent Calendar 2018 7日目の記事です.
“傘の盗難防止デバイスを作ってみた” の続きを読む