こんにちは。2018年入学の後藤(@goto_statement)です。
キャチロボに出場したチーム「ラグビーの亡霊」で、機械と電気を担当していました。
この記事では、キャチロボ出場機体「KIRIN」の電装について紹介します。前回の記事でチーム紹介や動作動画を掲載していますので、こちらもご覧ください。
この記事はrogy Advent Calender 2022 14日目の記事です。
使用したモーター
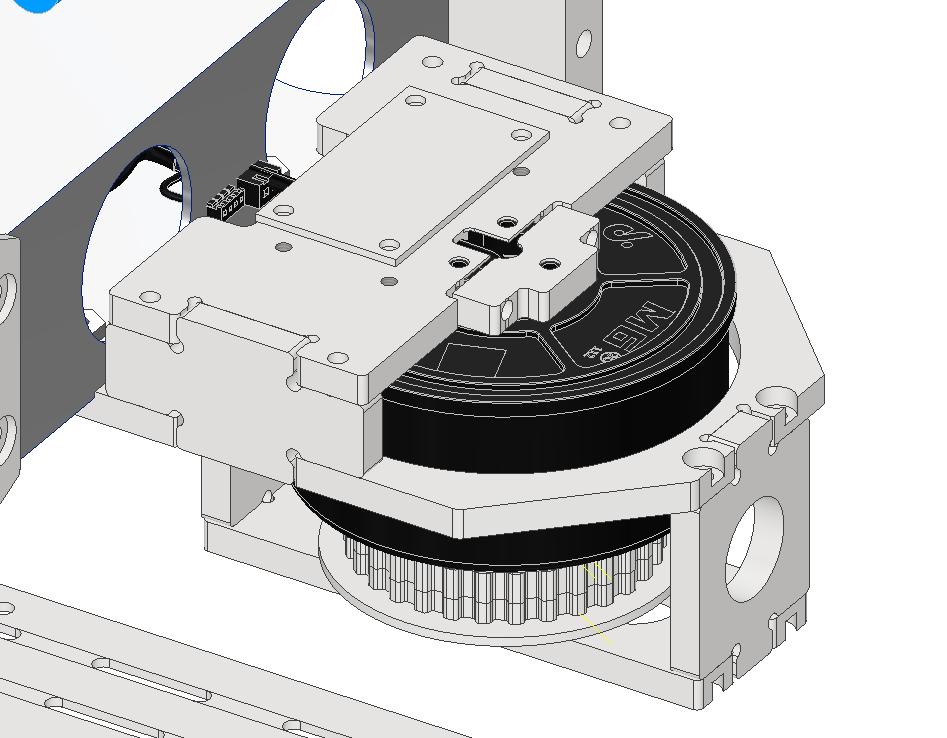
KIRINのアームは4自由度となっていますが、その駆動にはDirect Drive Tech社製のDDT-M0602C-112を用いています。
 引用元:https://www.switch-science.com/products/7647
引用元:https://www.switch-science.com/products/7647
キャチロボは速さを競うコンテストではないですし、KIRINの機構ではモーターは重力に抗って駆動力を出す必要が無いので、そこまでモーター出力を求める必要がないです。またこのモーターにはモータードライバーが内蔵されていて、RS485通信で制御できるためPCから制御しやすい、などなど、手軽に使えるような特徴を持っていつつ、値段も5000円程度で手ごろなのが決め手となって、採用するに至りました。
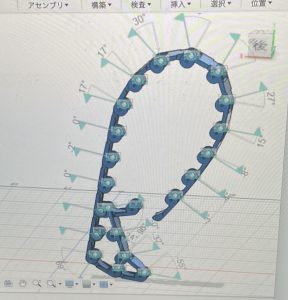
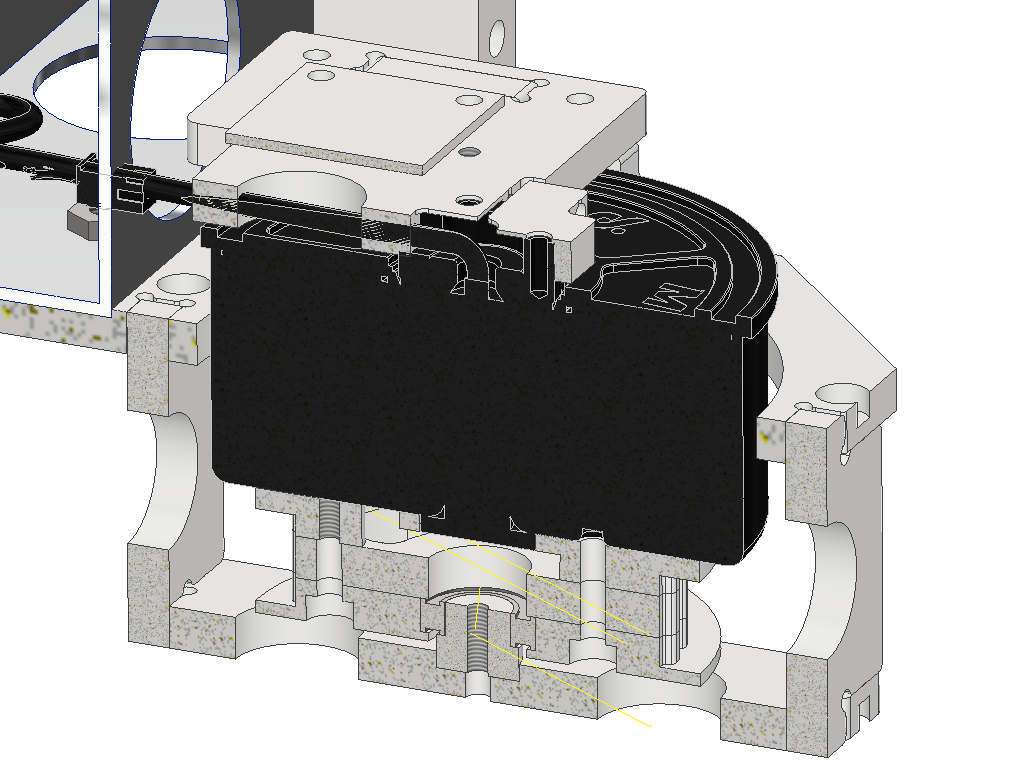
ただ、このモーターは少しくせがあって、固定がしにくいです。我々は、まずタップでM2.6(旧JIS…)のめねじを作って…
さらにクランプをして、そしてもう1つベアリングを用意して両持ち構造を作っています。
モータードライバーが内蔵されているので電気担当としては比較的楽なのですが、機械担当には負担をかけるモーターですね。
全体のシステム図
これがKIRINの電装系システム図です。
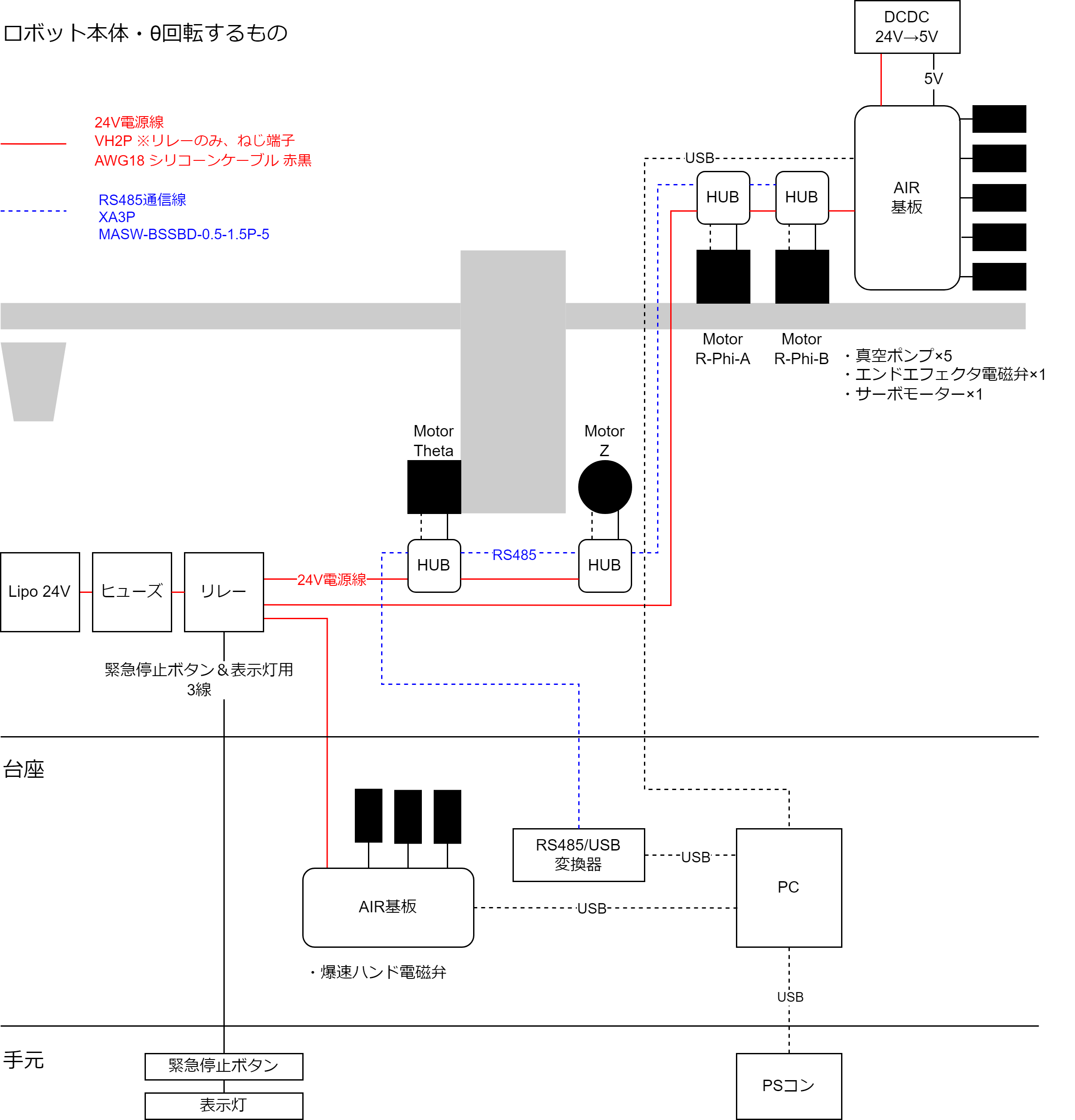
工夫点として、ロボット本体内は配線を簡素にするためディジーチェーンっぽくしています。4つのモーターとエンドエフェクタ用の自作基板「KILLING AIR」の電源供給、そして4つのモーターのRS485通信について、ディジーチェーン風になっているのがわかると思います。自作基板「KILLING HUB」によって、それを可能としています。
今回の電装はできるだけ簡素にして時間をかけないこと、そして場所を取らないことを目標としており、自作基板は上記の2種だけとなっています。
以降は詳細について書いていきます。
バッテリー周辺回路
バッテリー周辺は、とにかく部品数を減らしたいし、配線も簡素にしたいし、自作基板もできるだけ作りたくない、ということで、既成品の組み合わせでなんとかしています。
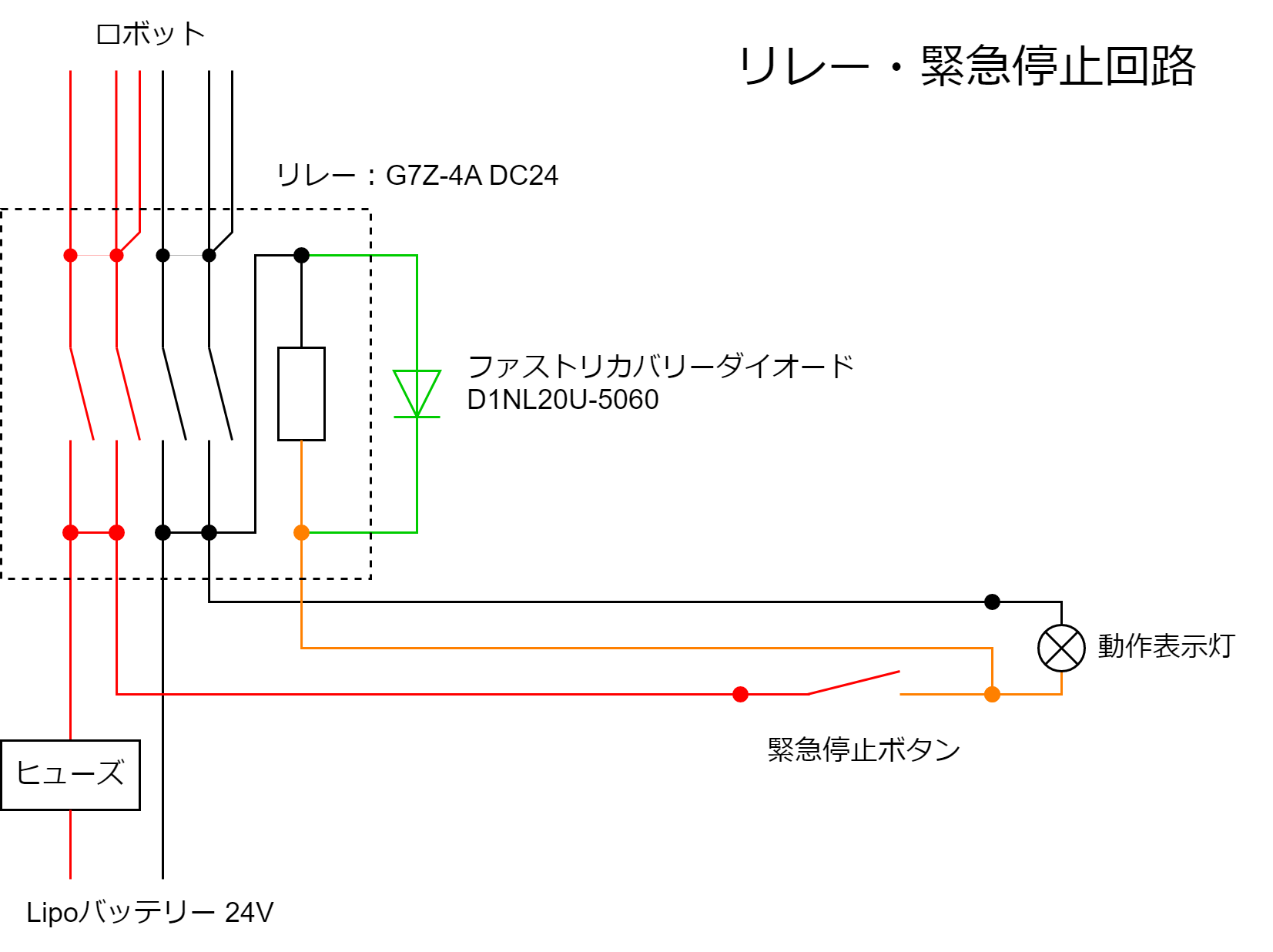
緊急停止時に電流を遮断できるようにリレーを使っています。リレーはオムロンのG7Z-4A DC24を使っています。採用の決め手はネジ端子があって基板を作らなくてよく、端子台にもなるからです。ただ許容電流は過剰ですね。リレーのコイルに対するフリーホイールダイオードとしてD1NL20U-5060を使っています。ちゃんとダイオードは入れましょう。感電します。というかしました。あぶないです。
ヒューズは自動車用のものを使っていて、ケーブルのように使えるものにしています。
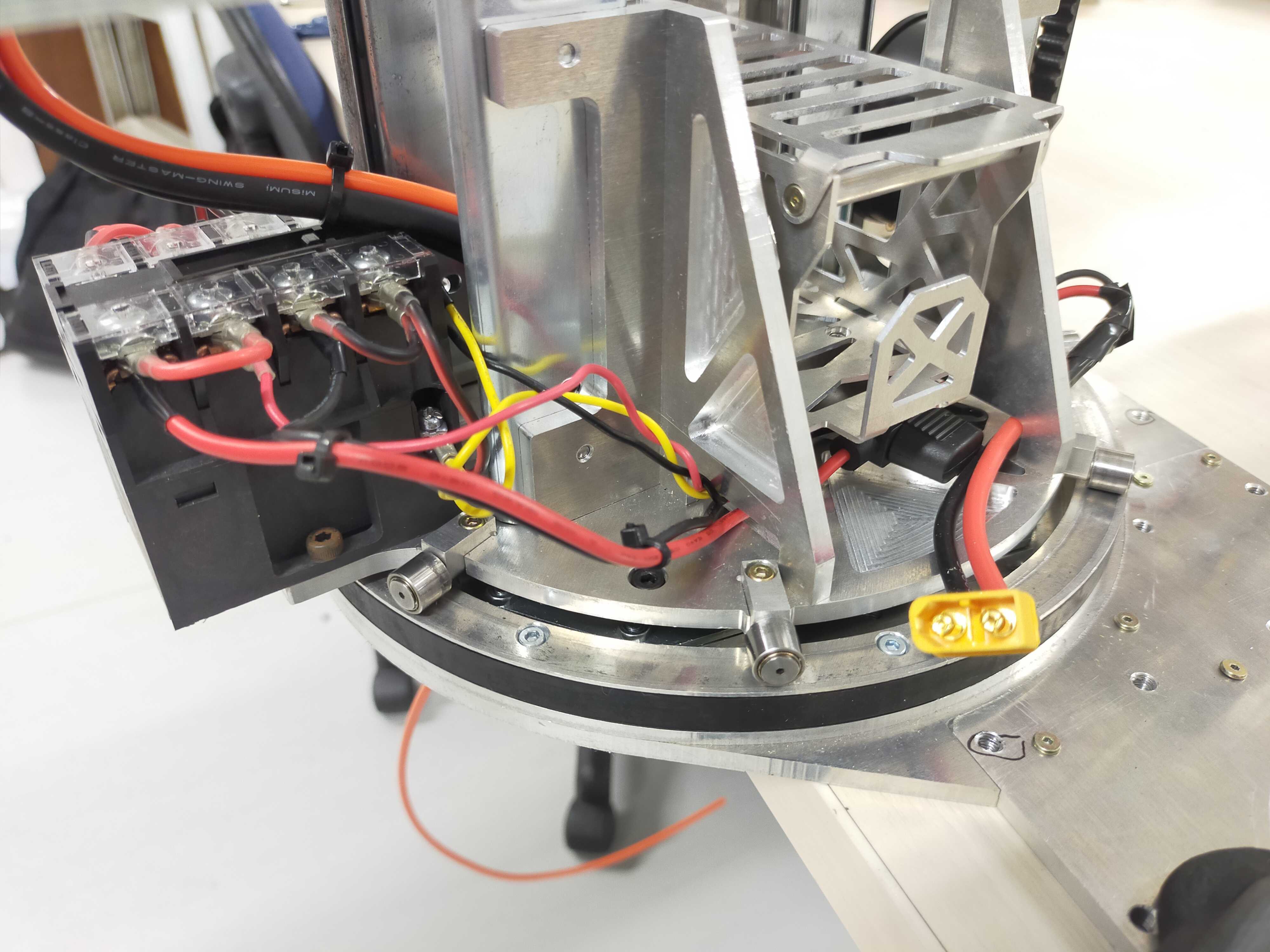 バッテリー周り。左にリレー、右にヒューズがあります。
バッテリー周り。左にリレー、右にヒューズがあります。
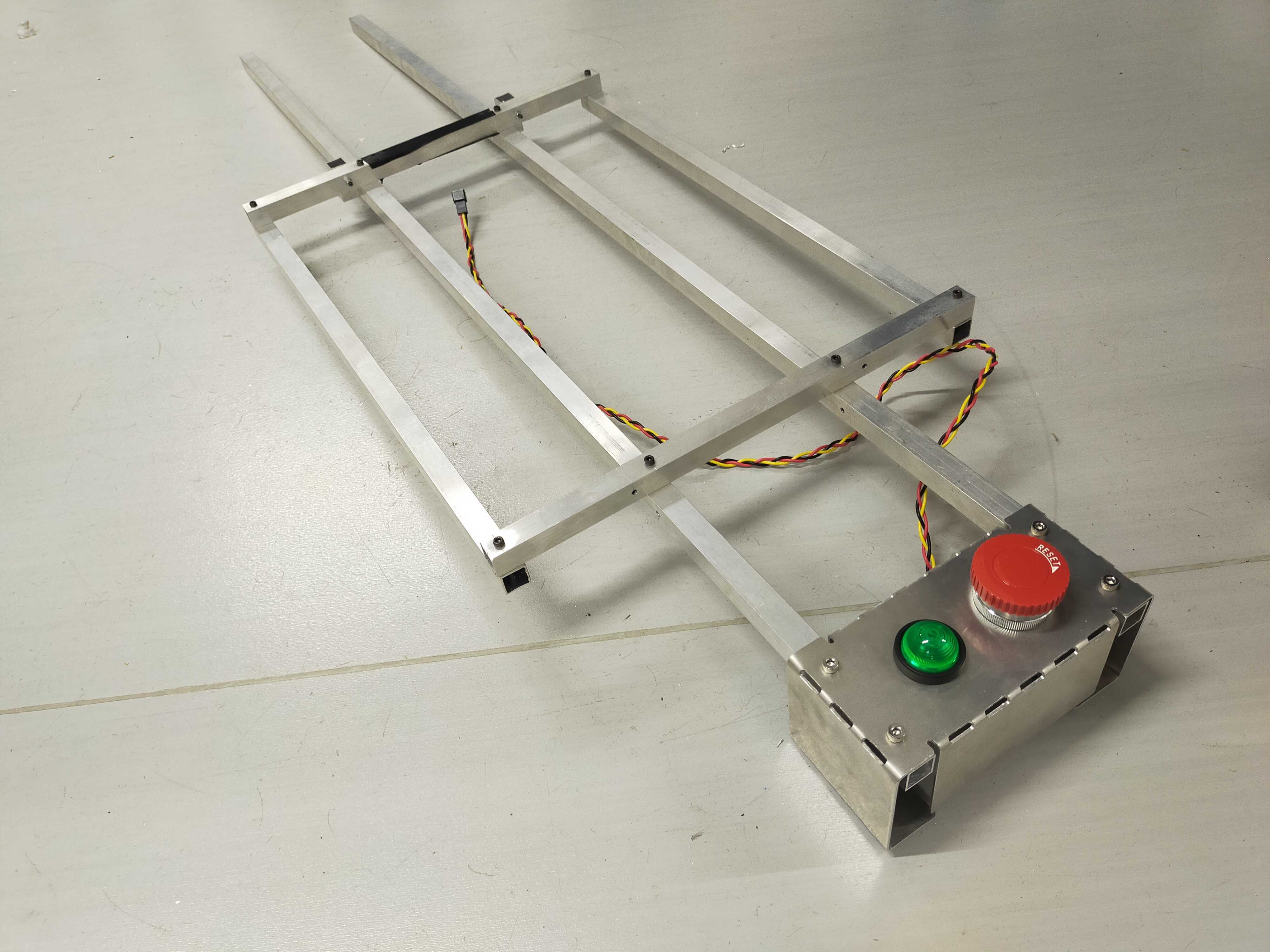
キャチロボのルール上、緊急停止ボタンと緑色の表示灯を付ける必要があるので、手元で押せて、手元で表示灯も確認できるようなものを作りました。これはPCを載せる台も兼ねています。
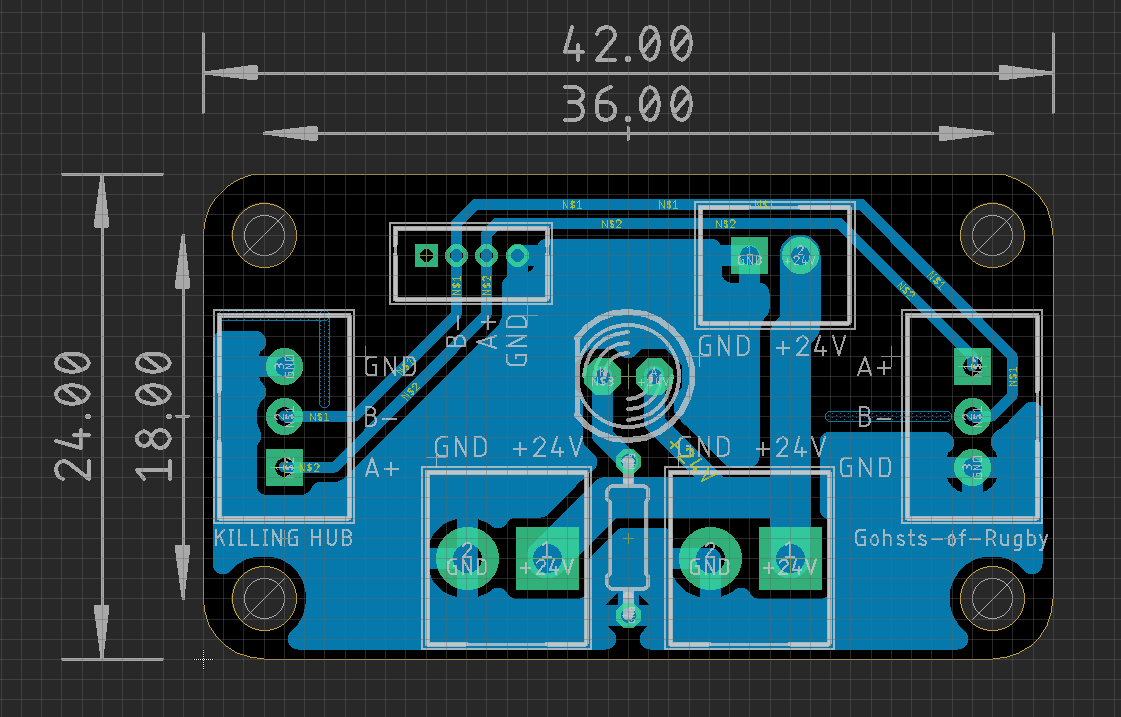
自作基板 「KILLING HUB」
モーターなどをディジーチェーン的につなげるための基板です。コネクタとLEDがあるだけでシンプルです。できるだけコンパクトにしました。
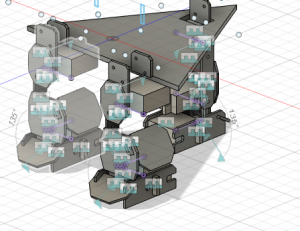
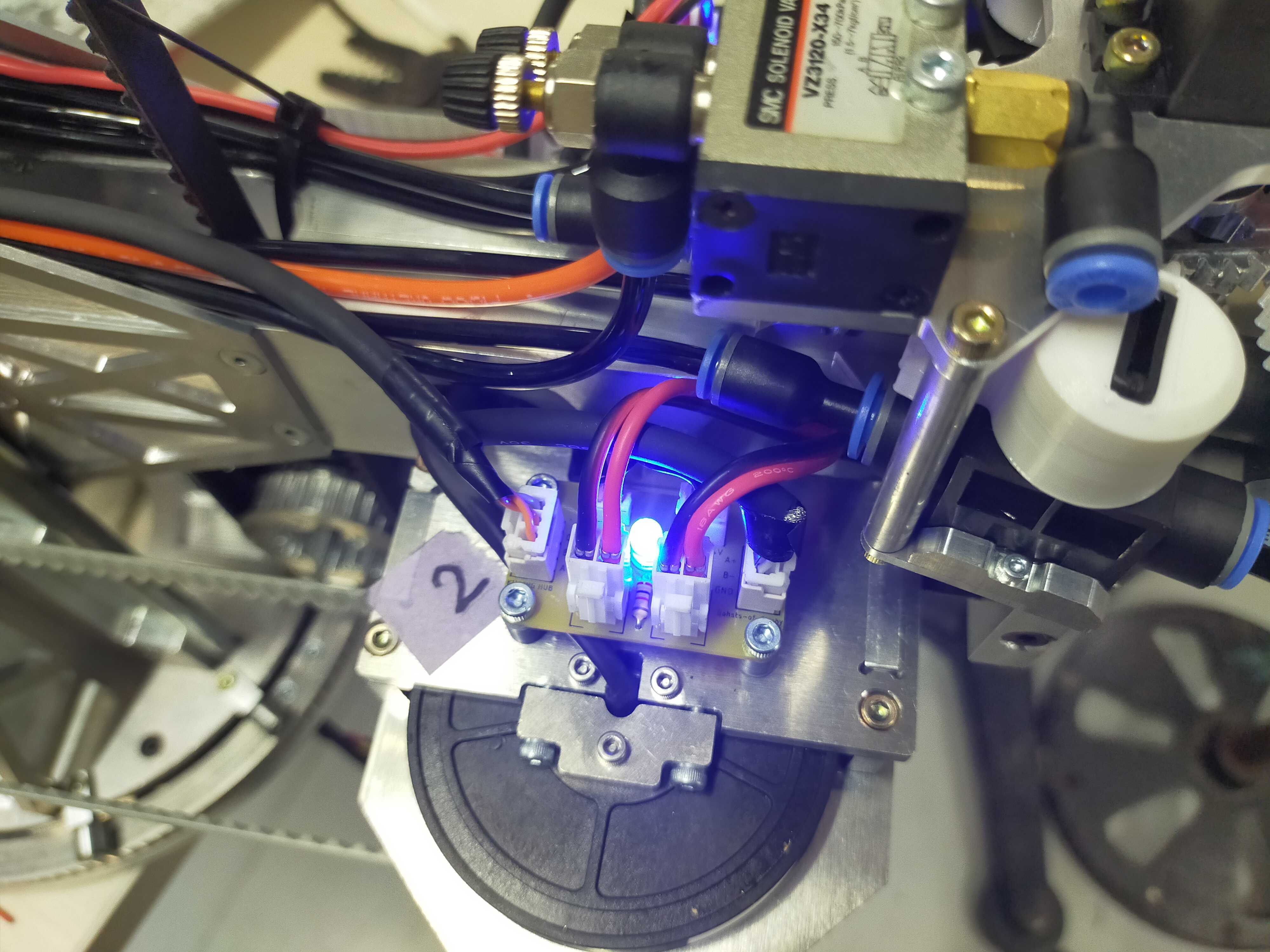
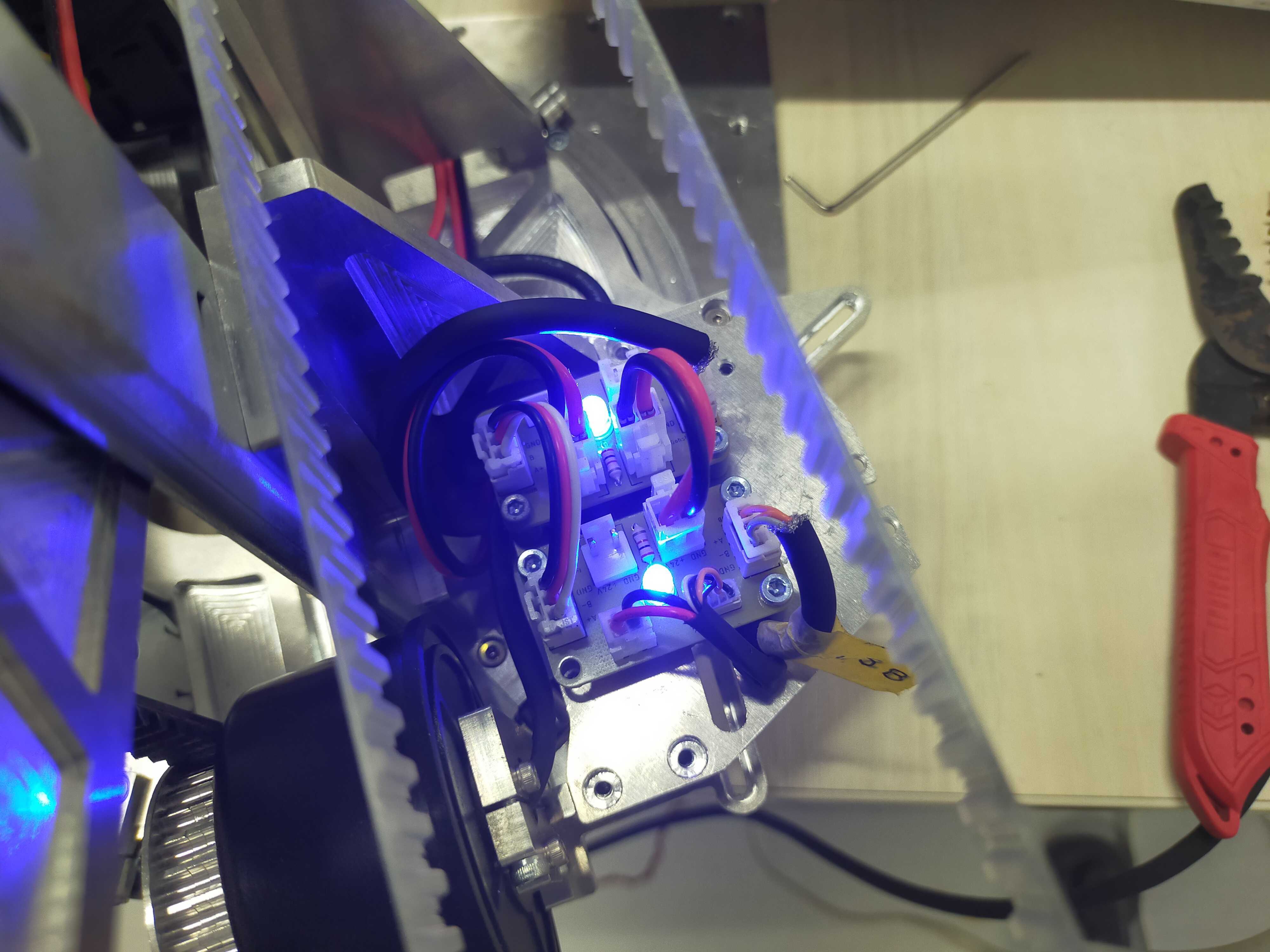
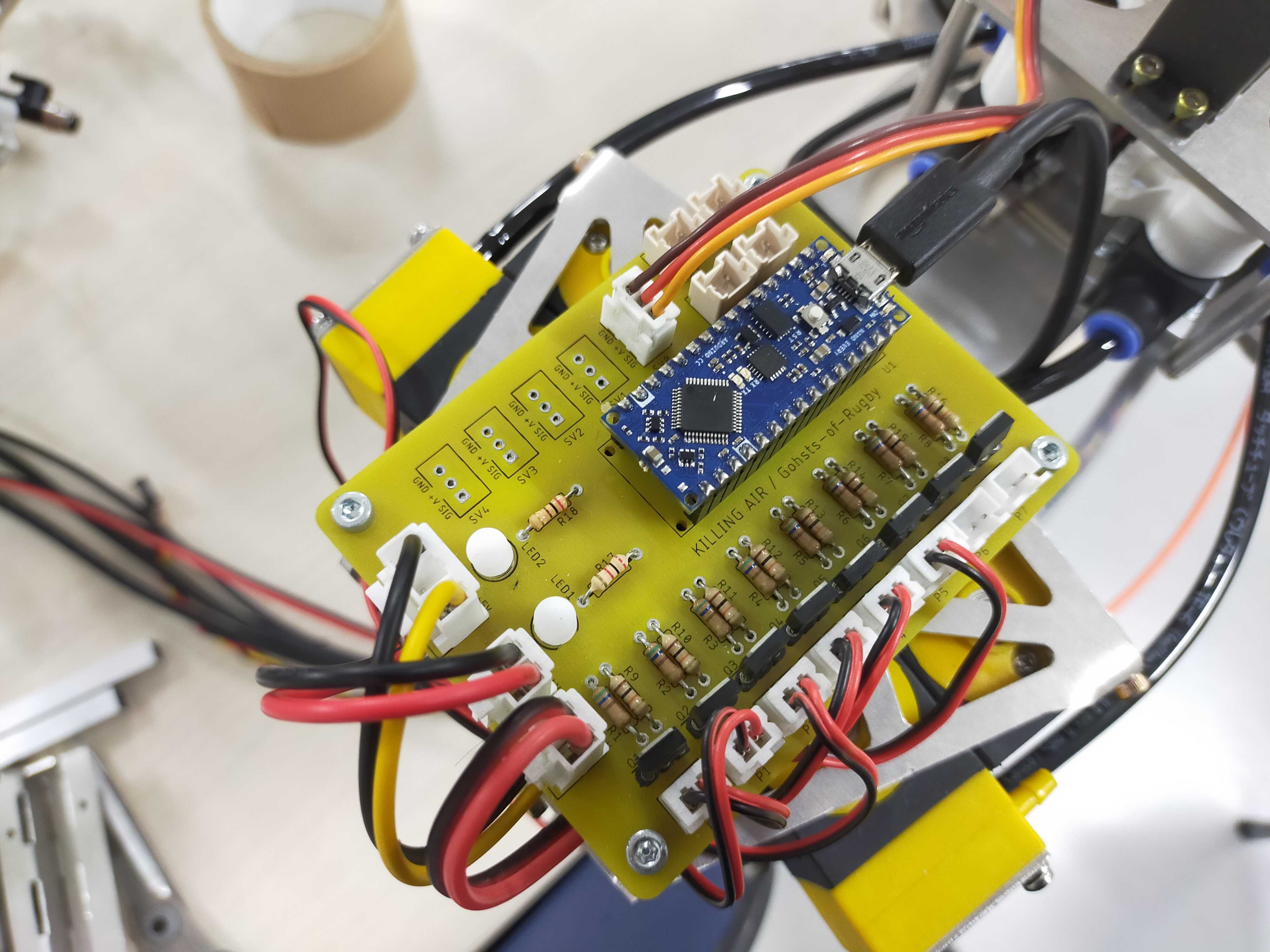
実際に機体に載せているところです。Elecrowで発注しています。
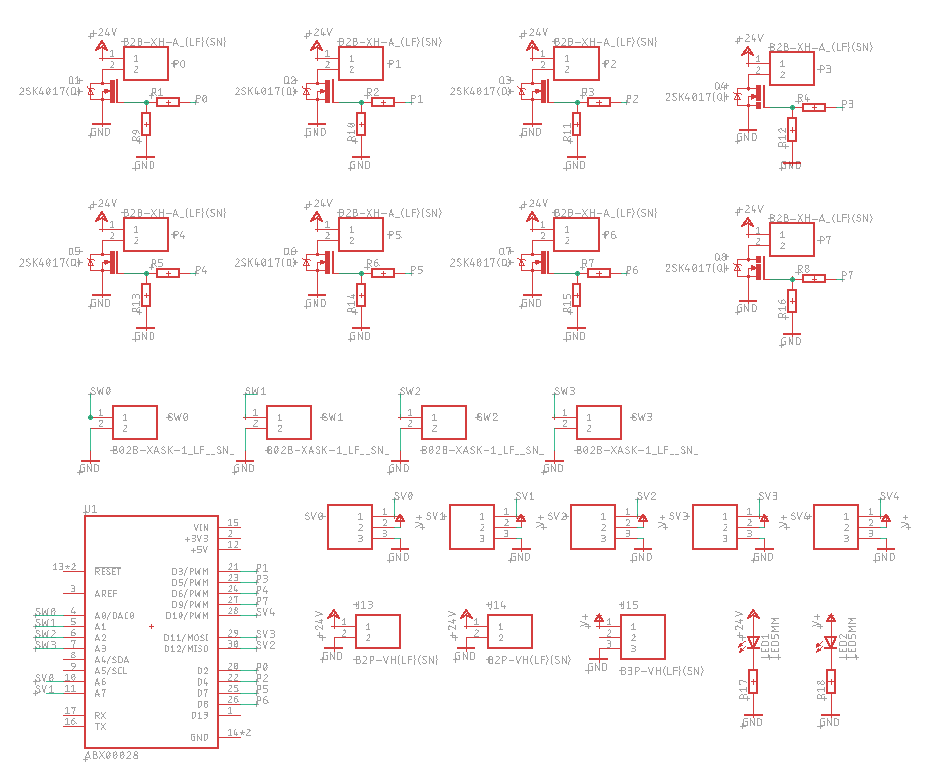
自作基板「KILLING AIR」
真空ポンプのスイッチングと、エンドエフェクタに使っているエアシリンダのための電磁弁、そしてサーボモーターを制御するための基板です。マイコンボードのArduino Nano Everyを載せています。真空ポンプと電磁弁のスイッチングはNch FETの2SK4017を使っています。
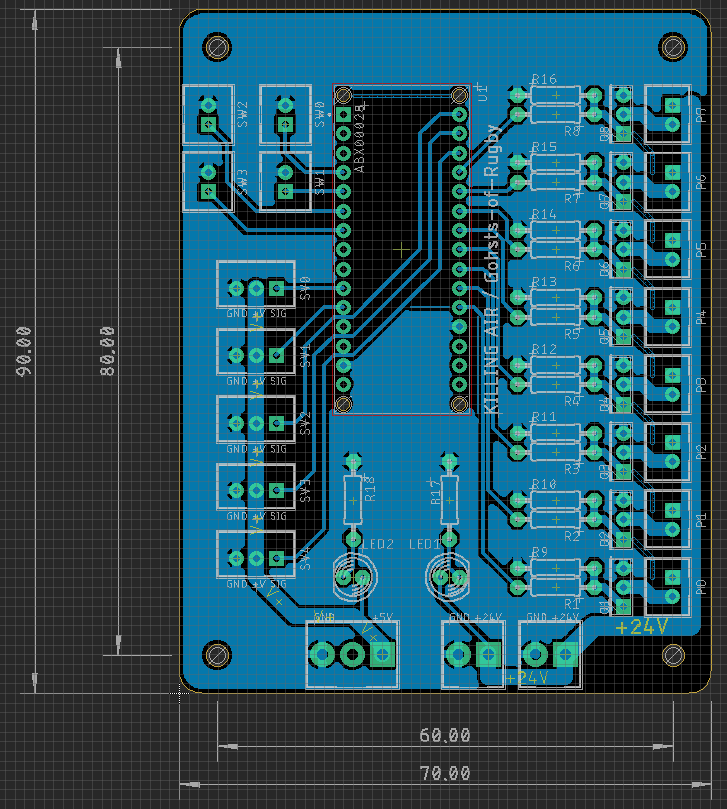
作った基板がこちらです。
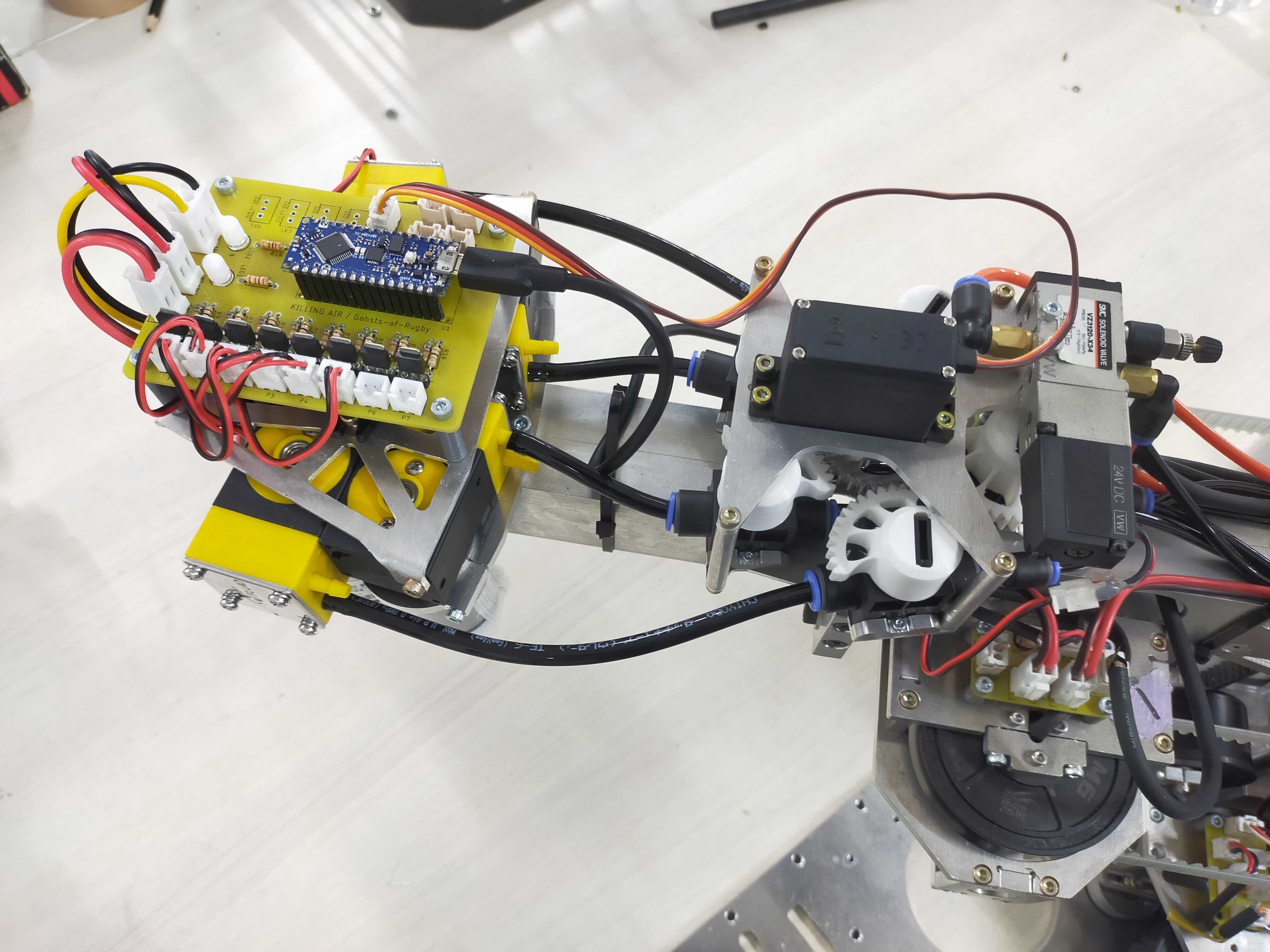
それを使っている様子です。真空ポンプ(左)、サーボモーター(右)、電磁弁(右)です。サーボモーター周りの機構についてはまた別の記事で。
新基板「KILLING NewAIR」
基板「KILLNG AIR」についてですが、PCとの間のUSBケーブルで行うシリアル通信が切れるときがあるという問題があり、本番でもそれが起きてしまいました。また別の小型アーム(通称・爆速ハンド)を動かすために、もう1つ基板があったのですが、そちらはなぜかArduinoがアチアチになって壊れることがあるという問題がありました。
キャチロボのあと、工大祭(大学の学園祭)にて展示することになったため、この問題は解決したいと思いました。そのために考えうるすべての対策を施すことにしました。
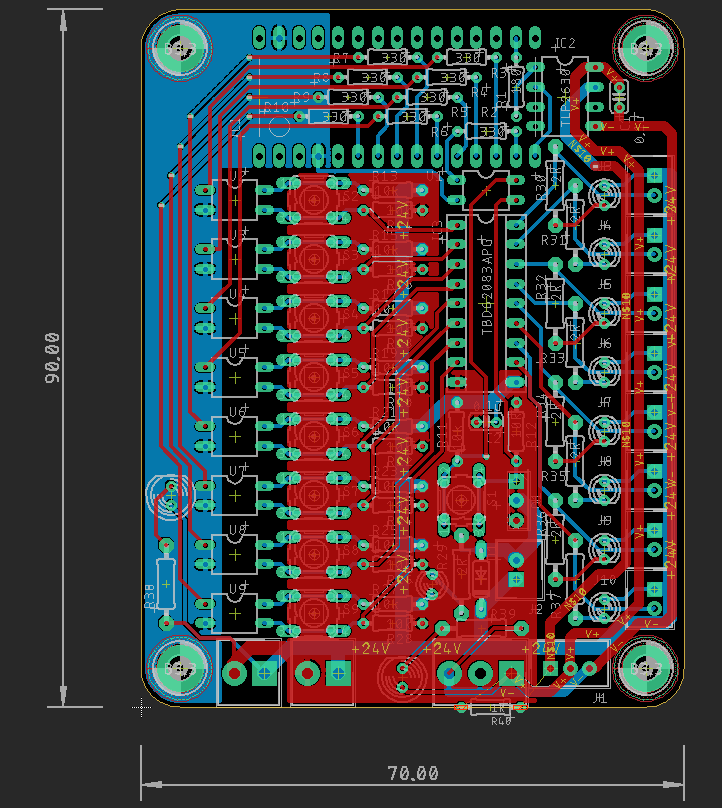
そしてできたのがこちら。新基板「KILLING NewAIR」です。
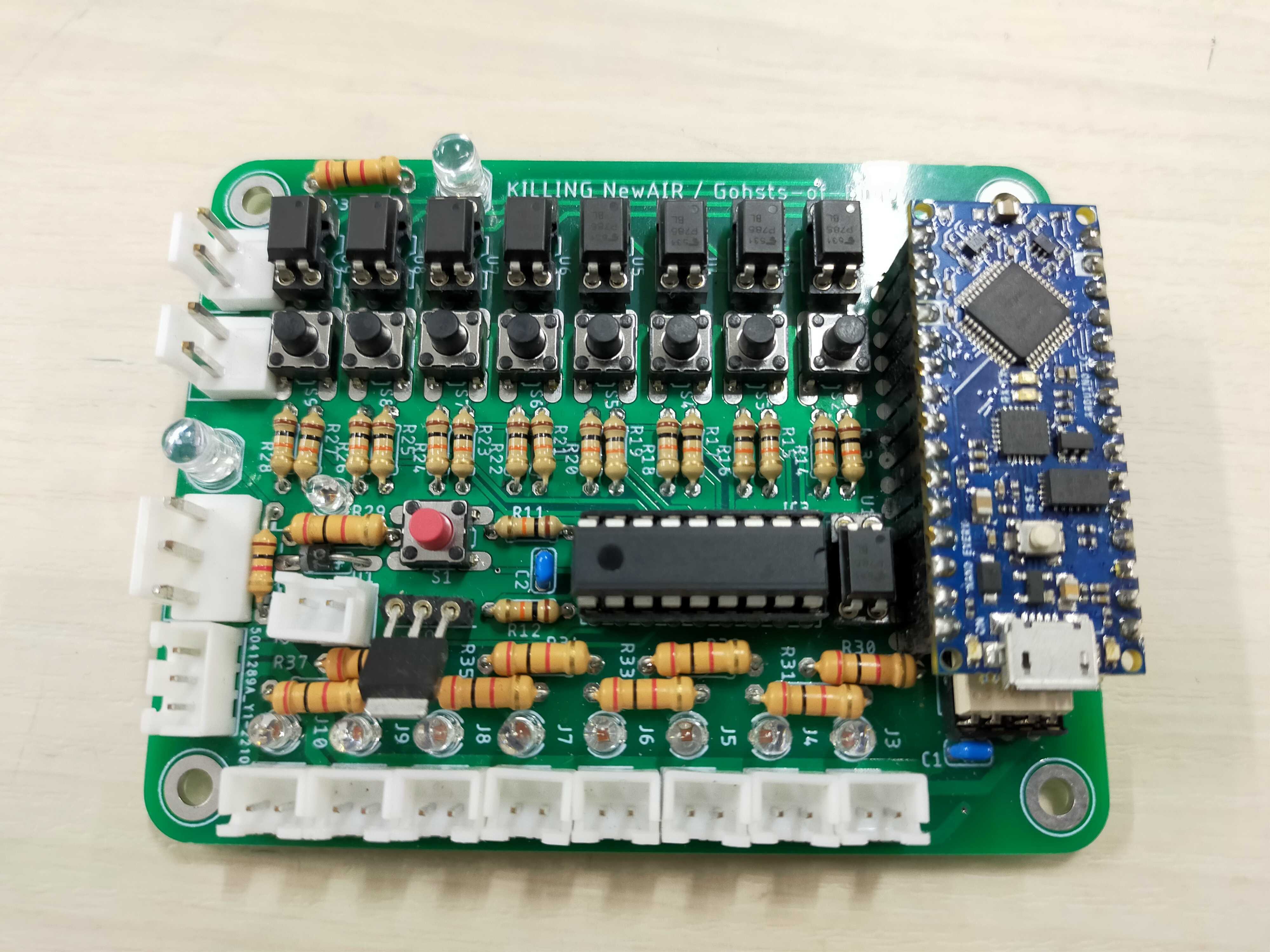
改善点は3点です。1点目はFETを変えたことです。真空ポンプや電磁弁のスイッチングにはトランジスタアレイのTBD62083APGを使うことにしました。まず旧基板では逆起電力の対策をしていなかったのですが、していないのはやはりまずそうと考えました。そこで、ダイオードが内蔵されており逆起電力対策がされているTBD62083APGを採用しました。
また「爆速ハンド」用に、どうしても1つ電流を5Aほど食うソレノイドを動かす必要があったため、そこにはMTB30N06I3というFETを用いています。形や値段は同じなのに、2SK4017のドレイン電流が5Aでギリギリだったのに対し、MTB30N06I3とすると22Aとなり余裕があります。こちらには逆起電力対策としてダイオード1S10を別付けしました。
2点目はマイコンとそれ以外を完全に絶縁したことです。強電側(24V)のノイズ等が通信に悪影響を及ぼしているかもしれないという予想のもと、この対策を行いました。トランジスタアレイやFETについてはフォトカプラTLP785を用いています。またサーボモーターを接続したり、工大祭用に電飾としてLEDテープ(NeoPixel)をつけたりしたい、ということで、ここには高速通信が可能なフォトカプラTLP2630を採用しました。
3点目はユーザーにやさしい機能の追加です。タクトスイッチを押すとポンプや電磁弁が動いたり、機器をONにしているときは赤色のLEDがつくようにしました。
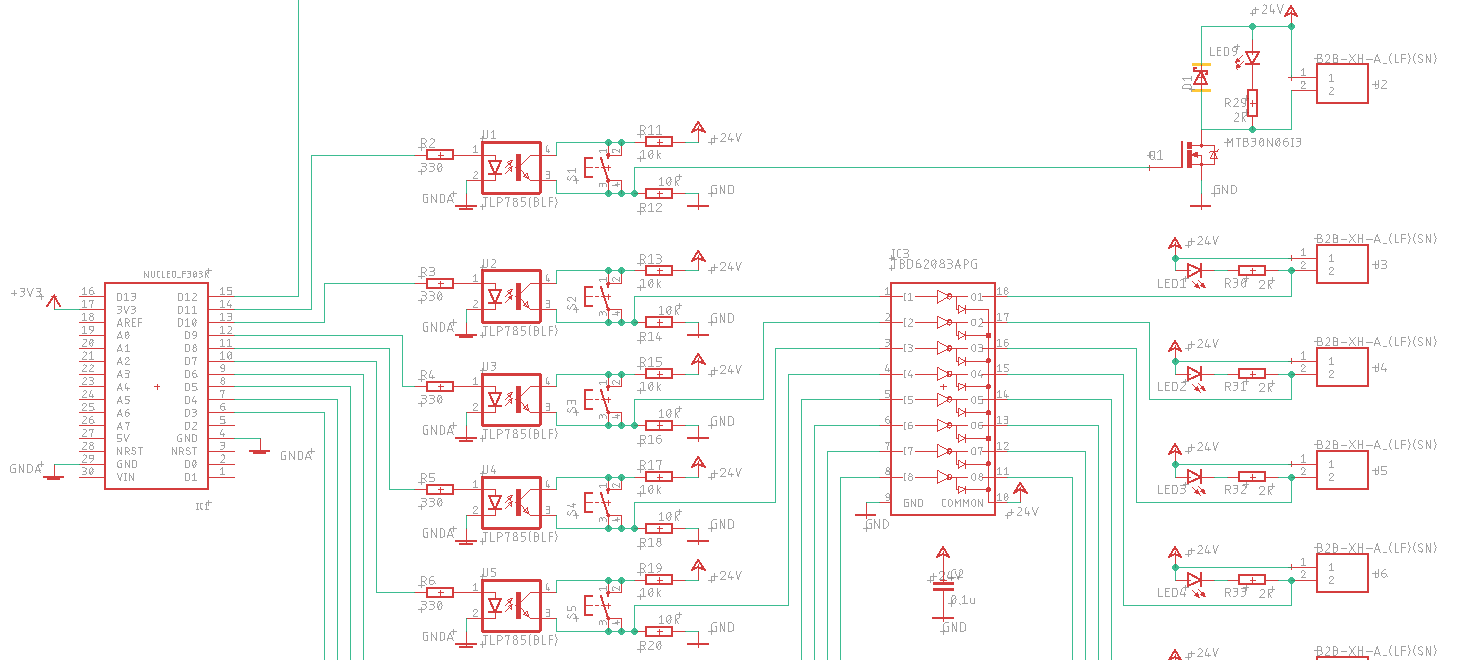 フォトカプラTLP785、トランジスタアレイTBD62083APG、FET MTB30N06I3の回路図です。
フォトカプラTLP785、トランジスタアレイTBD62083APG、FET MTB30N06I3の回路図です。
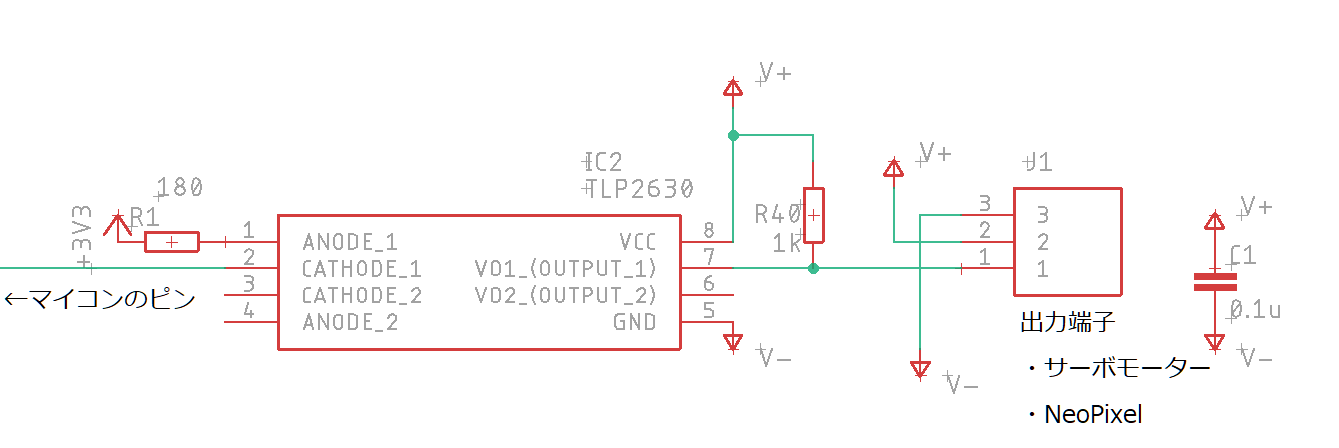 TLP2630では、VCCとOUTPUT端子の間に1k抵抗を入れることに注意
TLP2630では、VCCとOUTPUT端子の間に1k抵抗を入れることに注意
 密です。
密です。
 タクトスイッチを押している様子
タクトスイッチを押している様子
これらの対策の結果として、工大祭では回路のトラブルは一切なく2日間動き続けました!通信トラブルもほぼなかったそうです。
こういうところはさぼっちゃいけないということが身に染みてわかりました。
いかかがでしたか?
2パートにわたって、私が担当した直動回転差動機構と電装の紹介をしました。
次回以降、KIRINに搭載した面白機構や制御についての紹介記事が続きます!今後の記事もお楽しみください。