はじめまして,21-Yoshizoeです。
この記事は工大祭ブログリレーの記事です。工大祭のロ技研のページはこちら。
東京工業大学の公認サークル「ロボット技術研究会」のブログです。 当サークルの日々の活動の様子を皆さんにお伝えしていきます。たくさんの人に気軽に読んでもらえると嬉しいです。
こんにちは、20のYoです。この記事では、水に挑み続けるアクア研の中のAWACSプロジェクトの活動紹介をします。また、この記事は、工大祭ブログリレーの記事です。工大祭のロ技研のページはこちら。
アクア研では流体に関することは何でもやっています。AWACSプロジェクトでは、障害物を避ける水面ロボットの開発を4人で行っています。8月28日、29日に行われた、 水中ロボットコンベンションinJAMSTEC 2021~海と日本プロジェクト~にも出場しました。
みなさま,ご機嫌麗しゅう.
深夜の公園でカップ麺をすする毎日を送っております,20-Aoです.ふしんしゃじゃないです
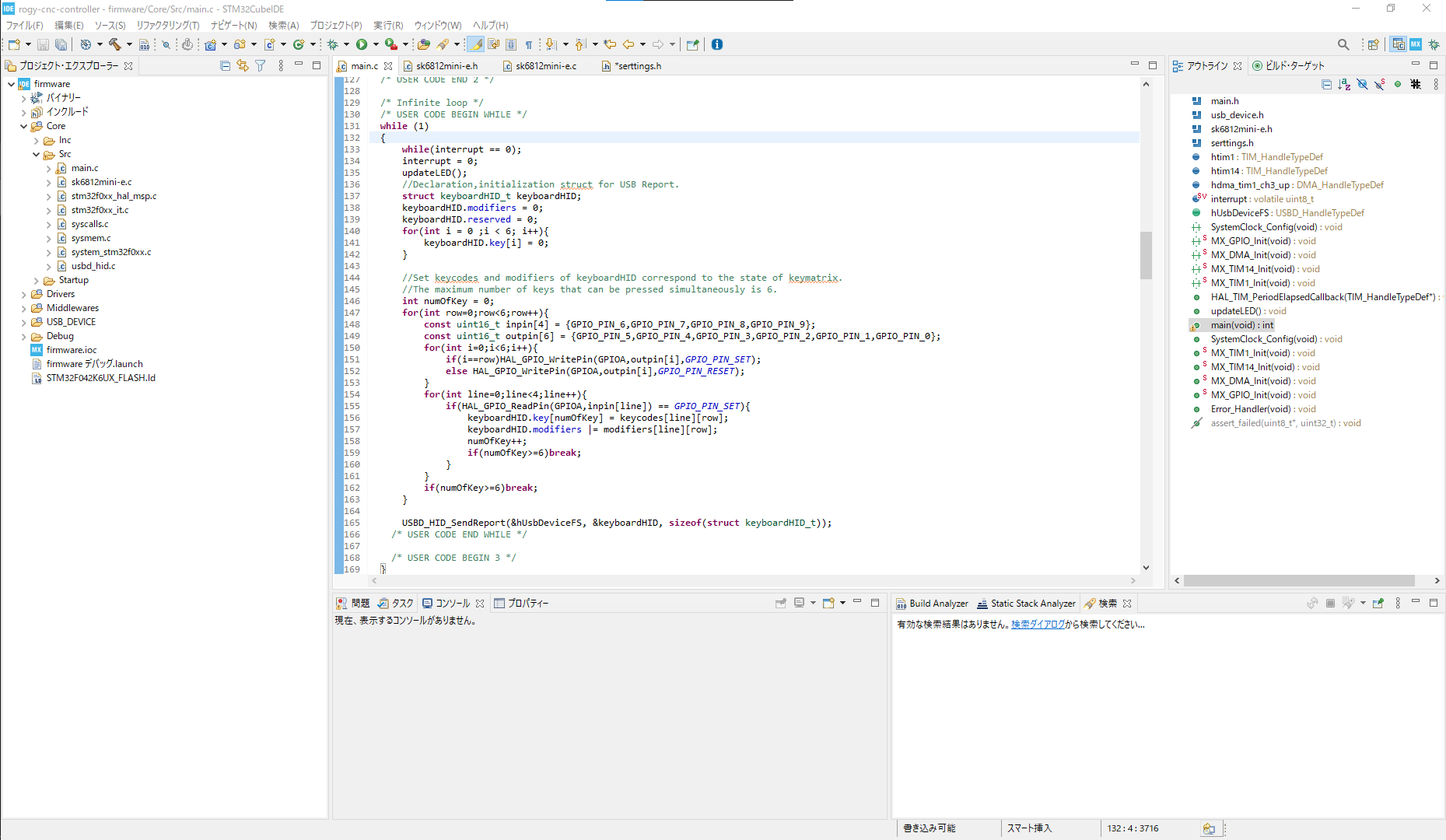
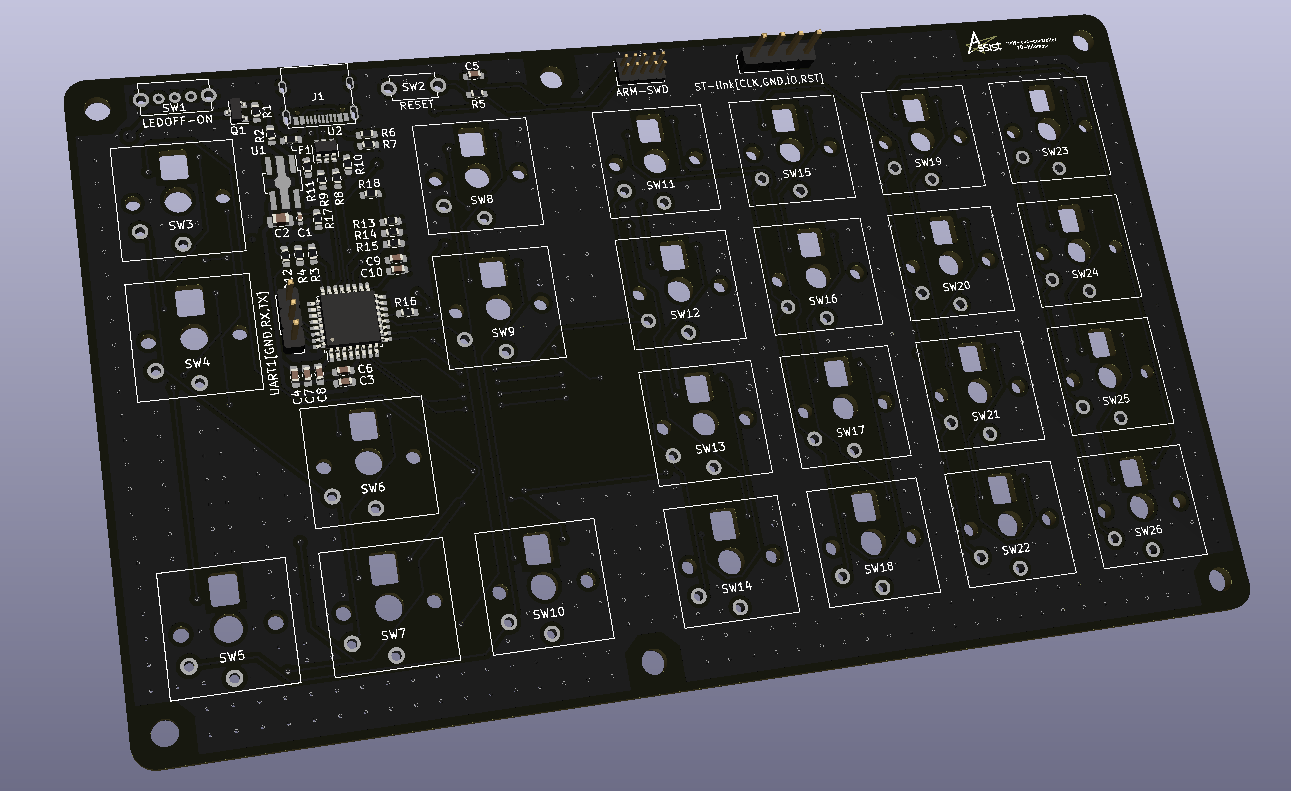
本日は先日より始まりました,「CNCキーボード作ってみた」シリーズCAD編でございます.
製作動機や仕様などは18-Hitomosi先輩の「仕様 / 回路編」をご参照ください.
Maquinistaの方々のような素晴らしい設計とは程遠い稚拙なものですが,どうかご容赦ください.

こんにちは。2018年入学の後藤(@goto_statement)です。
この記事は工大祭ブログリレーの記事です。工大祭のロ技研のページはこちら。( https://c-028.space.koudaisai.jp/ )
この記事で紹介するのは、その名も、
<<<<< 電卓演奏ロボット「A-HOGE」 >>>>>
です!
この記事は複数回にわたります。これはPart1の記事です。
Part1では、作品をざっくりと紹介し、作ろうと思ったきっかけや、Twitterに投稿するまでの経緯、そして投稿してからのことについて書きます。
次回以降、技術的なことについても説明していきますので、興味がある方はこちらもお楽しみに!(ただ公開日は未定です、すみません…)
まずはこちらをご覧ください!
電卓演奏ロボット「A-HOGE」を作りました。
この動画ではモーツァルト作曲「トルコ行進曲」を演奏しています。
ステッピングモーターとサーボモーターを使った機構がソレノイドを高速で移動させています。
あたりめ(@atarime_desu)さんがモデルです。 pic.twitter.com/mONi4A75kM
— GOTO STATEMENT (@goto_statement) October 2, 2021
この投稿は多くの反響があり、10月29日 8:00現在、3618RT、6910いいねがついています。
初めまして、17のバンル( @17_bnr )です。
この記事は工大祭ブログリレーの記事です。工大祭のロ技研のページはこちら。( https://c-028.space.koudaisai.jp/ )
ところで皆さん,mRNAはご存知でしょうか?
最近はワクチン開発にも使われていて,一躍有名になりましたね。
ただ,実際にmRNAが何しているか知らない方も多いかもしれません。
(東工大生は学部1年で生物学をやるので,全員理解していると思いますが……)
簡単に言うと,DNAが持っている遺伝情報を写して(これを転写と言います),
この情報をもとにタンパク質を作らせます。
ただ,遺伝情報をそのまま写すのではなく,
| DNA | 転写 | mRNA |
|---|---|---|
| シトシン(C) | → | グアニン(G) |
| グアニン(G) | → | シトシン(C) |
| チミン(T) | → | アデニン(A) |
| アデニン(A) | → | ウラシル(U) |
と変換して転写します。
……と,文章だけだとわかりにくいと思うので,
自作したmRNAGAMEでmRNAの気持ちを体感してみてください。
ルールは転写のやり方と同じで,
例えば,
冗談のピンク部分に「TAC」と表示された場合は,
マウスで黄色いボタンを押して「AUG」と答えてください。
1つでも間違えたらゲームオーバーなので,
より早く,正確に遺伝情報を転写してください。
(そして結果をツイートしてみてね)
※うまくゲームが表示されない場合はコチラ
ちなみに自分の自己ベストは14.2688秒でした。
「mRNAGAME」を14.2688秒でクリアしました! https://t.co/fb7kJkXvbW #mRNAGAME #工大祭2021
— バンル (@17_bnr) October 28, 2021
Q1は開始を意味する1種類のみの問題が,Q5は終了を意味する3種類のみの問題が表示されます。
これを覚えておくとより早くクリアできるかも

みなさま,ごきげんよう.20-Aoです.
本年度の工大祭はオンライン開催となり,弊サークルはYoutube Liveでの動画配信とブログリレーの2つを行います.
動画配信は10/30, 10/31の2日間,ブログリレーは10/27~10/31の4日間行われます.
ブログリレーはすでにスタートしており,最初は前部長の18-Hitomosiさんです.
工大祭2021公式サイトのロ技研ページ(こちら)も併せてご覧ください!

こんにちは。18-Hitomosiです。
この記事は工大祭ブログリレーの記事です。工大祭のロ技研のページはこちら。( https://c-028.space.koudaisai.jp/ )
CNCキーボードを作ってみた話を担当ごとに分けて書く予定です。今回は仕様/回路編です。 “[工大祭ブログリレー] CNCキーボード作ってみた(仕様/回路編)” の続きを読む
夢はケモミミ美少女ロボを愛でること。
どうも皆さまはじめまして、20のSugiです。
突然ですが、サーボモーターは「角度やら力やらをフィードバックしてモーターの出力を変化させることができる、ロボの世界になくてはならないものである」ことはここにいらっしゃいます皆さまにとっては周知の事実かと思います。
では、「既製品のサーボモーターでは大きさがデカすぎて都合が悪い! ワイが作ろうとしているロボに最適な形をしたサーボはこの世の中には存在しないのか!」と悩んだとき、皆さまならどうなさるでしょうか? そう、サーボを自作しますよね?
ということで、今回はサーボの仕組みを理解つつ、さらに将来小型のサーボを作れるようにと、サーボの自作を行いました。
皆様こんにちは.18のhiraです.
近年,自動運転やロケットやドローン,戦闘機でも「モデル予測制御(MPC)」なる制御方法が注目されているようです.
なんでもこのMPCを使うと運動モデルさえあれば誰でも簡単に(注 “誰でも”等の範囲は要検討)複雑なロボットを好きな軌道で動かすことができるようです!
この魅力的なMPCは,なんとMATLABの「Model Predictive Control Toolbox」を使うことでほぼGUI上で手軽に作ることができます.しかも作ったコードはC/C++に変換でき,それをビルドすればRaspberry Piといったマイコン上で動かすこともできます.
今回は簡単なバネ台車モデルを使い,MATLAB上でのMPCモデル及び運動軌道の作成,さらにC/C++のコードの生成とビルド方法を紹介します.
