みなさんお元気ですか?ごきげんよう!この記事は rogy Advent Calender 2022 の24日目の記事です。世間はイブで熱々ですが、懐が寒くなるこの時期、あったまりたいですね?燃やすんだ回路で有名な21-miyaです。え?その人はもう知ってる?僕は有名実況者では無いはずだけどなぁ
導入
今日はよく廃墟で見かけるアイツのことみなさんお忘れでは無いですか?
そう、どこにでもいるアイツ…
ゴキ..ではなくキャタピラについての話です。
まとまってるサイトはすでにいっぱいありますが、あえて駄文を承知で書きます。
歴史
ざっくりまとめると重いものを運ぶために蒸気機関の頃に発明され、のちに戦車として発展、改良されてきたもので、重機や戦車として良く用いられている。近代的な面白い足回り。
動機
作りたいと感じるものがそこにあった。そこに理由はいらない気がする。強いて言えば、ライントレース大会でシンプルにタイヤのおもちゃを作るのは負けだと思ったからというのが大きいです。しかし、ちゃんと以下の条件を踏まえているので紹介してみます。
利点と欠点
一般的なキャタピラの弱点と強みには以下のようなものがあります。
利点
一般にキャタピラには
・耐貨重量が大きい
・かっこいい
・停車時に安定しやすくそのまま反動が大きい動作ができる
・不整地に強い
・とにかくカッコいい
という利点があることが知られていますね。
欠点
・燃費が悪すぎる
・一箇所でも破断すると動けない
・メンテナンス性が良くない
・振動・衝撃が車体に伝わりやすい
その上で、利点はロボコンの役には立たないし、欠点は燃費が悪い=伝達効率が悪い、メンテナンス性が良くない(=作りずらい)はかなり致命的であるため、弊サーではあまり採用する人がいません。というか、私は弊サーで作っている人を見たことありません。
しかし、カッコいいのに悲しいじゃないですか!!しかも、個人的には不整地で走れることから無人探査機として激アツなので作って見たいというのもあります。

これが私が開発をしようと思った理由です。
ちなみにアルミではなく3dプリンターをチョイスしたのはsd90ーhvを駆動用のモーターにするつもりだったので、普通に軽くないといけないことと、安いこと、加えて追加工できることがあげられます。
経過報告
結論から述べると完成しませんでした。。。
(性根が)腐ってやがる。。。(いや、納期が)早すぎたんだ。。
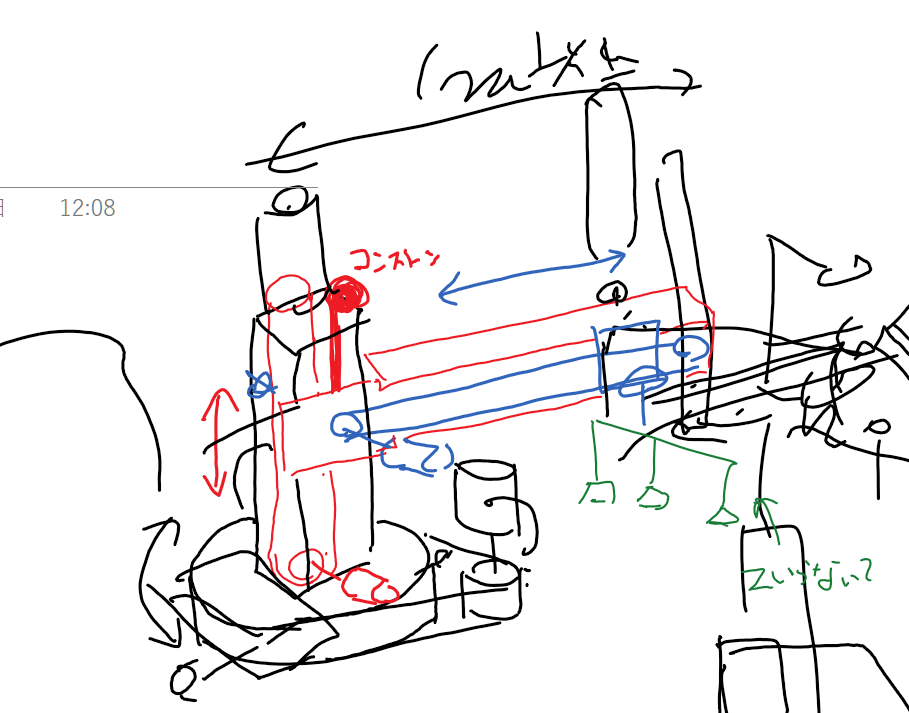
というわけで、意味があるかはわからない現状報告が下になります。
設計開始
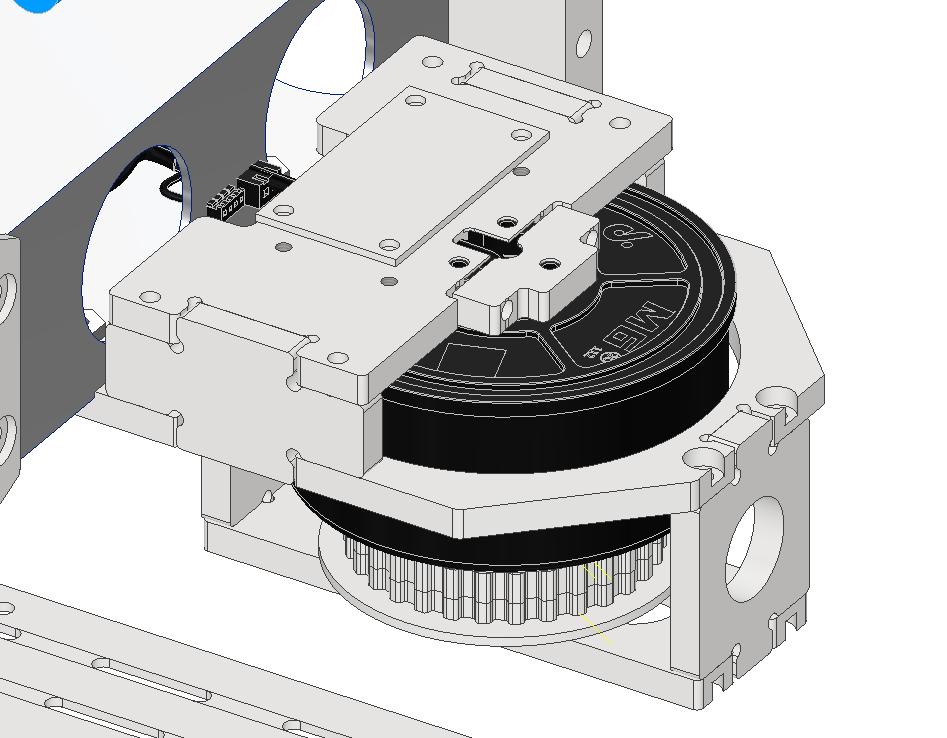
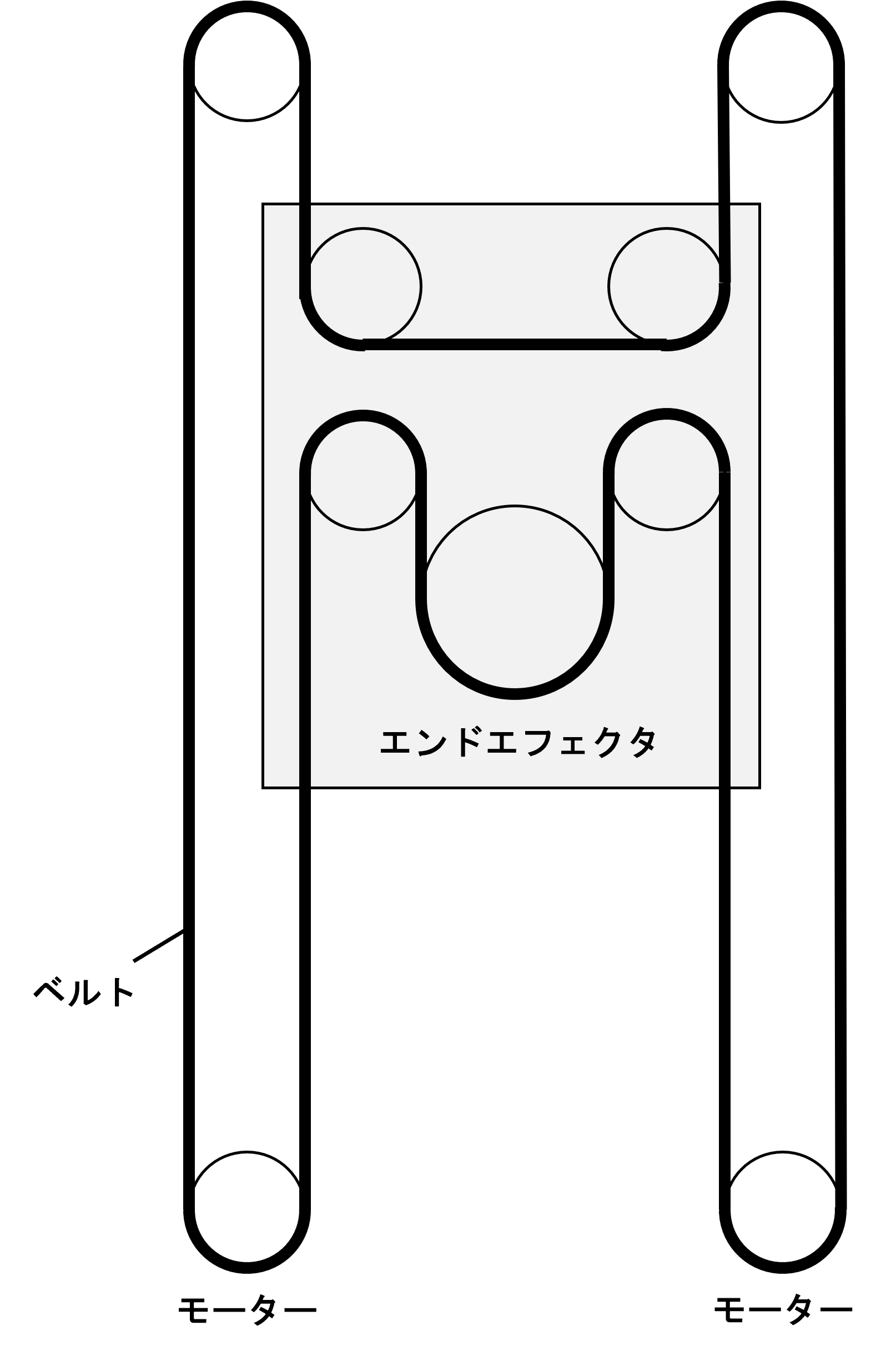
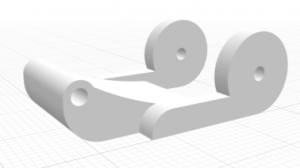
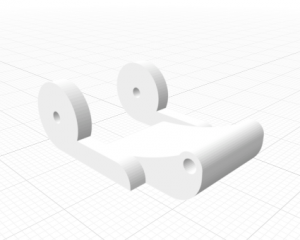
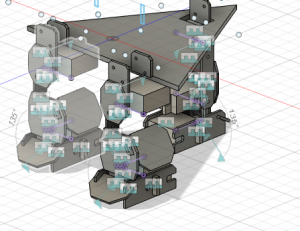
まず私はこのサイトを参考にして設計を開始して以下のような部品を設計しました。ここで注意したポイントは軸の高さを揃えることと、干渉しないように大きい方の円のサイズや切り欠きを調整したこと、できる限り太くて頑丈なボディを心掛けつつ、切り詰められるところを減らして軽くしたことなどです。
ここまでは良かったのです。
ここまでは。。。
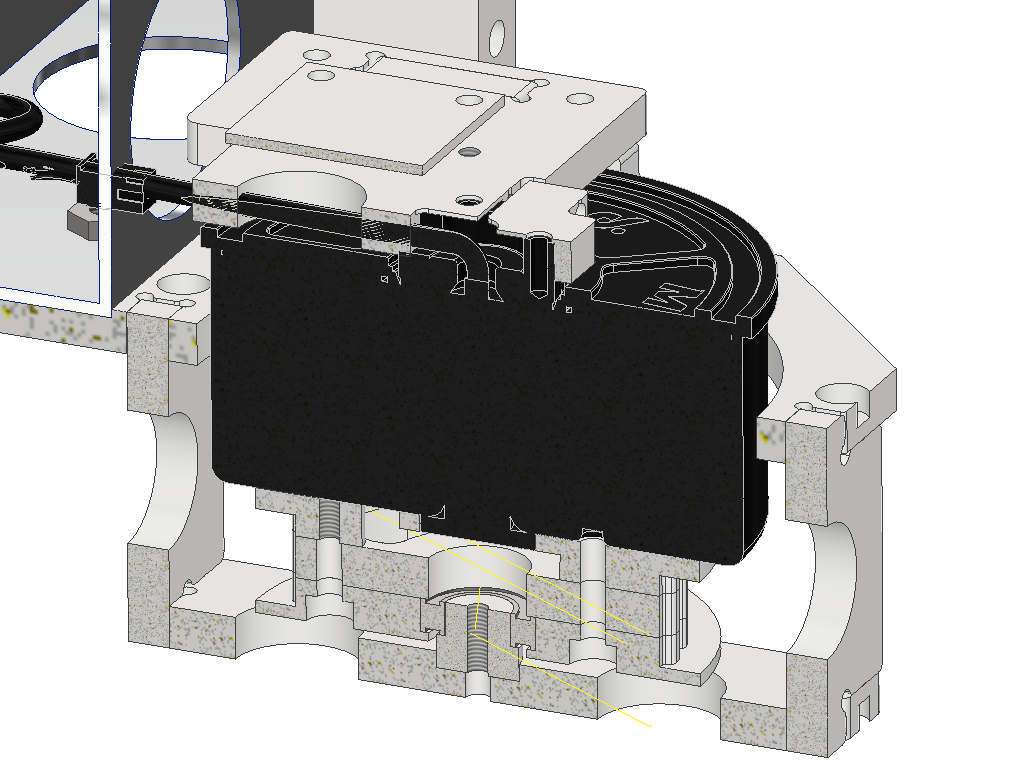
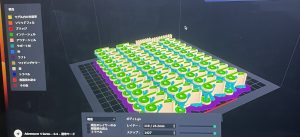
次に、これに軸を作って並べる作業を始めました。22こ並べてジョイントする、簡単なお仕事です。
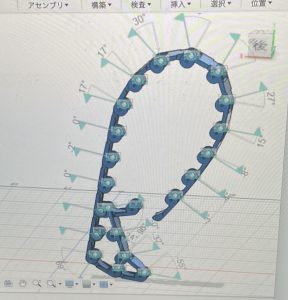
あれれ、辛い上に繋げるとバグるぞ?私の頭の中には疑問符が湧いてきました。なんでこんなことをやっているんだろう?というか印刷して見ないとそもそも(組み合わさるかどうか、ちゃんと動くかどうかは)なんもわからんくないか?
それでも全部並べて見たのが先ほどの画像です。
ナンテコッタ
印刷
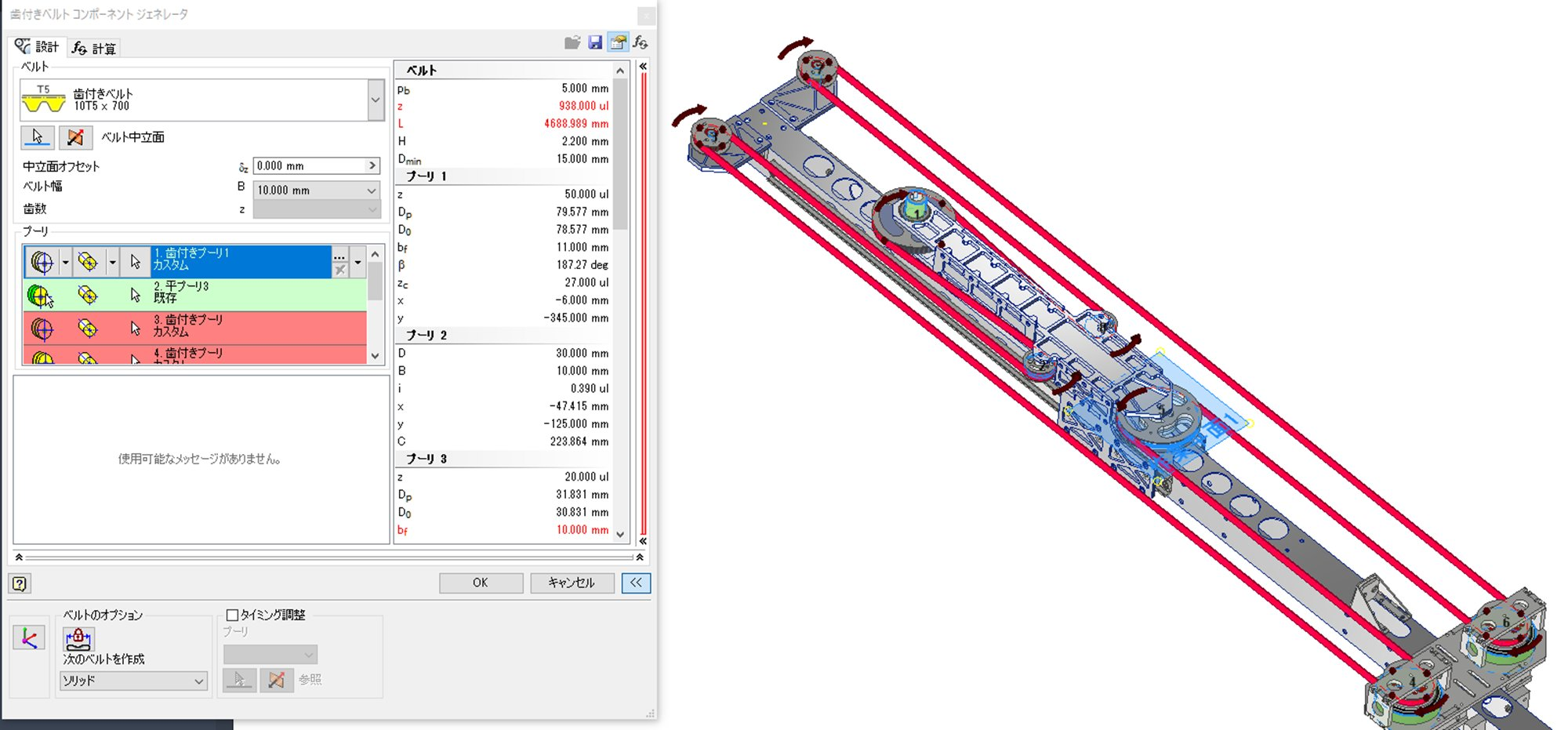
しかし眺めていても大きさは分かりません。じゃあこれを印刷しよう!(3dプリンターは印刷するまで誤差がわからないため)印刷してから実測値を出し、ギアの回転数から歯数を割り出して中のギアを設計するんだ。というわけで3dプリント用のコード生成ツールに並べました。
さすがは量産!壮観だなぁ
そして、いつものようにパラメーターを調整して印刷ボタンを押しました。

印刷時間はなんと怒涛の30時間越え!!
やばいと思いつつスイッチを入れた時、時刻は2022/12/22で、25(明日)が大会なので、すでに徹夜が見えていました。印刷を一度でもしくじれば未完成待ったなしです。(ドキドキチキンレース!)
私が固唾を飲んで見守る中、
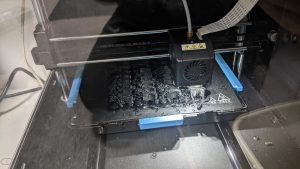

印刷失敗!!
これによって完成がなくなりましたとさ。。。
原因がまさかのフィラメントが印刷中に絡まるバグというのが救えない。。。
チキンレースは命懸け(崖から落ちちゃった)ということをはっきり理解できる楽しい計画でした。皆さんは納期よりも早い時期から作り始めましょうね。私はミカン職人なのでいいですが…
結論
錬成失敗!!
というわけで、オチも中身もないので最後はクソブログコピペで締めようと思います。すみません。
みなさんいかがでしたか?キャタピラの前世は?歴史は?今の設計法は!?調べて見ました。調べて見たところ、良く分かりませんでした。皆さんの推しの足回りをコメント欄で教えてね。
おまけ
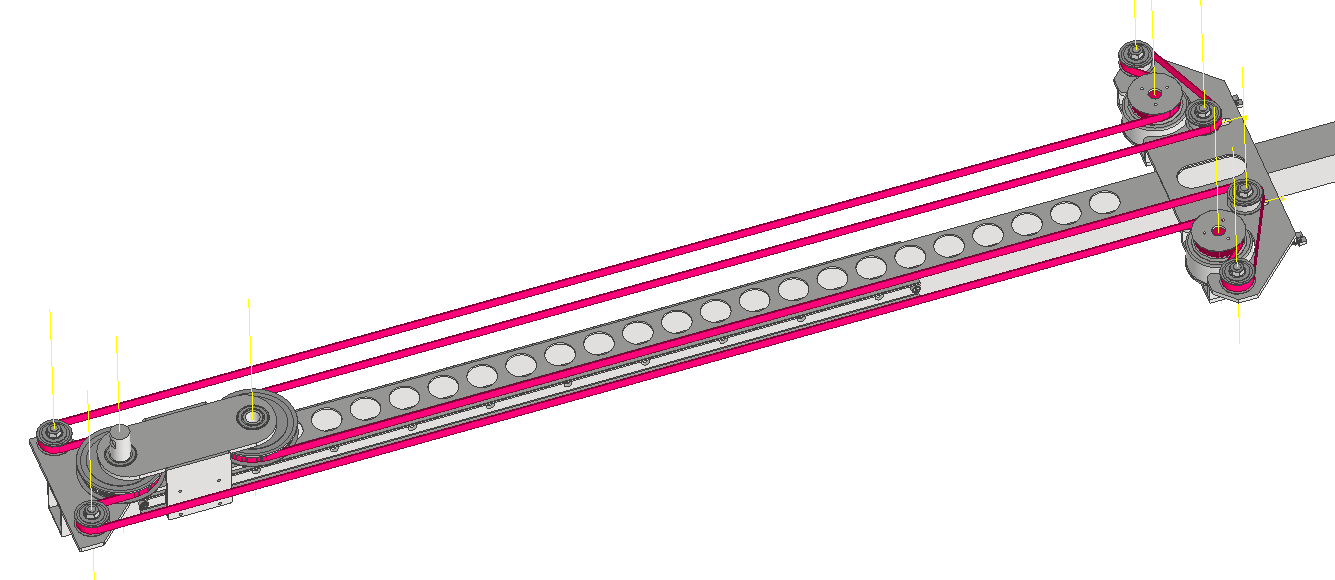
失敗した足回りの例兼制御できないという例
怠けたわけではないんです。。。純粋に完成しなかった(ごめんなさい)